TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040959
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2024153570
出願日
2024-09-06
発明の名称
けがき用治具
出願人
株式会社黒澤鉄工製作所
代理人
個人
主分類
B25H
7/04 20060101AFI20250317BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】2つの孔部の中心を結ぶ線の垂直二等分線をけがく作業を容易に行うことが可能なけがき用治具を提供すること。
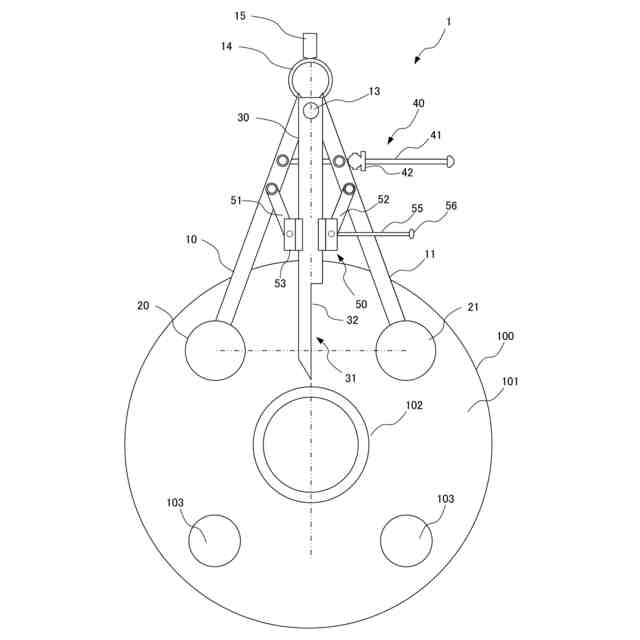
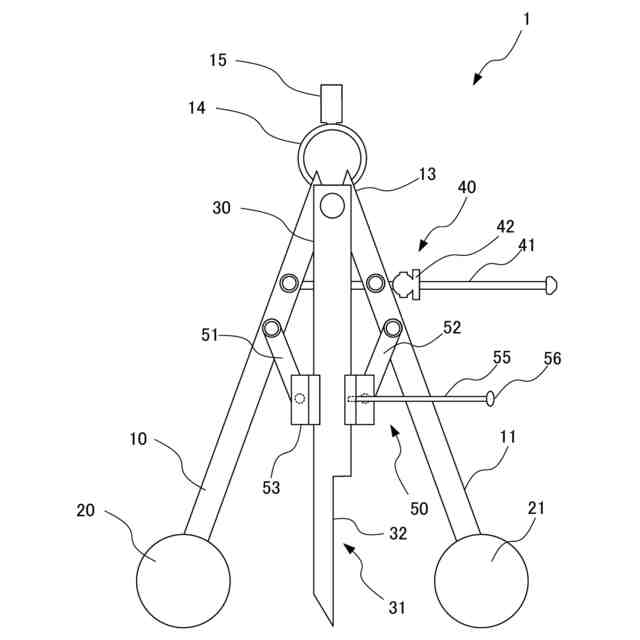
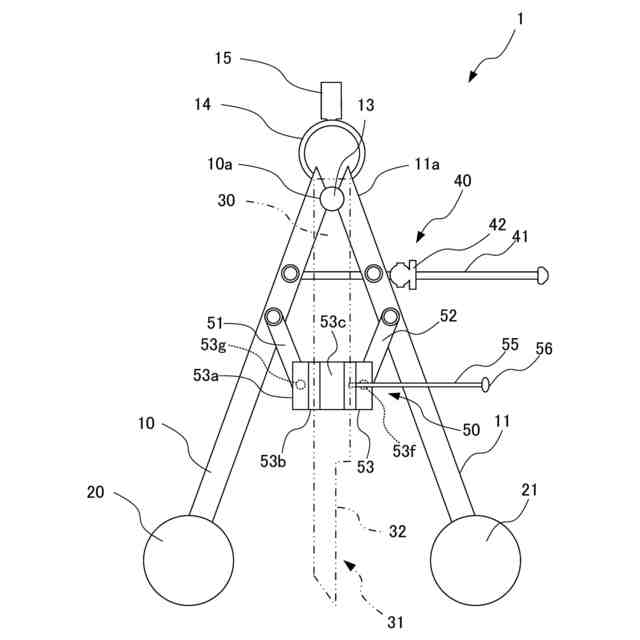
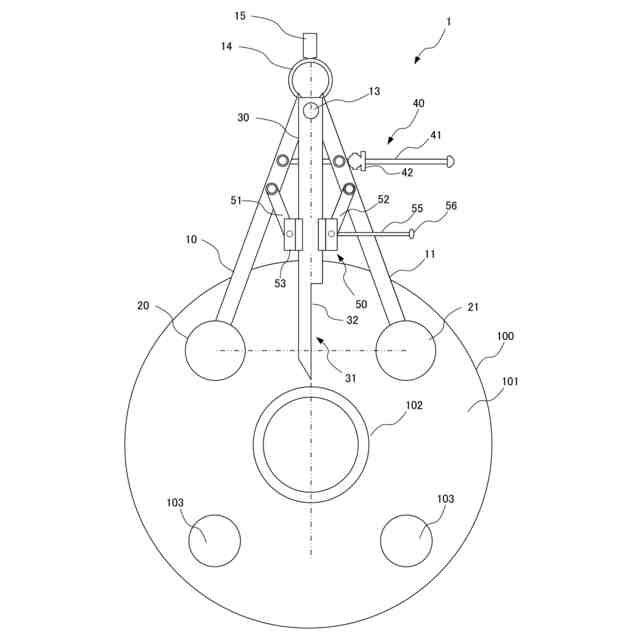
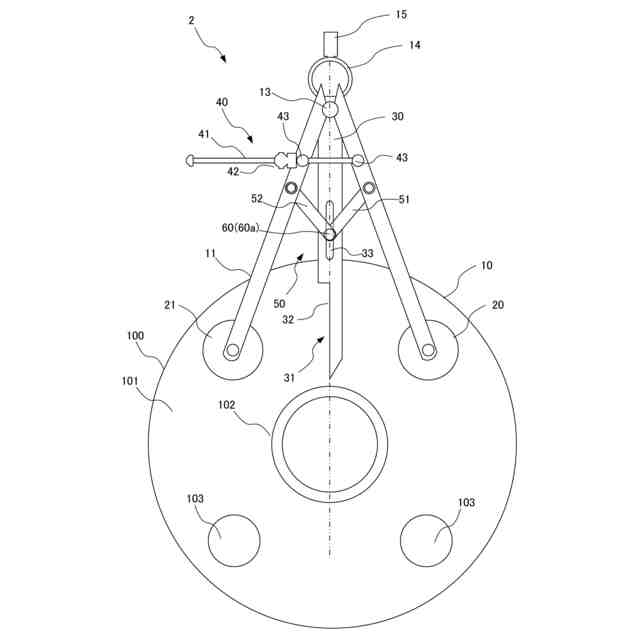
【解決手段】2つの孔部の中心を結ぶ線の垂直二等分線をけがく際に用いるけがき用治具1であって、一端部が互いに回動可能に接続された第1の脚部10、第2の脚部11及び定規部30と、第1の脚部10及び第2の脚部11の他端部に取り付けられた球状の先端部材20、21と、第1の脚部10及び第2の脚部11との角度を調整する角度調整部40と、定規部30の中心軸が第1の脚部10と第2の脚部11とによってなされる角度の二等分線に一致するように、定規部30を把持する定規支持部50と、を備え、先端部材20、21が孔部に配置された状態で、先端部材20、21の中心が孔部の中心軸上に位置し、定規部30は、側面の一部に、定規部30の中心軸まで欠落した欠落部31を有する。
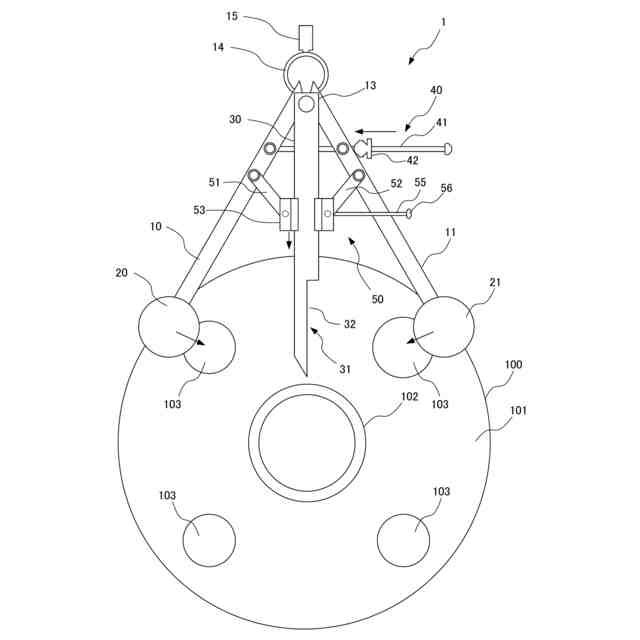
【選択図】図5
特許請求の範囲
【請求項1】
複数の孔部を有する物体の平板面に、2つの孔部の中心を結ぶ線の中心点をけがく際に用いるけがき用治具であって、
一端部が互いに回動可能に接続された第1の脚部、第2の脚部及び定規部と、
前記第1の脚部及び前記第2の脚部の他端部に取り付けられ、前記孔部に配置される回転体形状の先端部材と、
前記第1の脚部及び前記第2の脚部との角度を調整する角度調整部と、
前記定規部の中心軸が前記第1の脚部と前記第2の脚部とによってなされる角度の二等分線の方向に延びる状態で前記定規部を支持する定規支持部と、を備え、
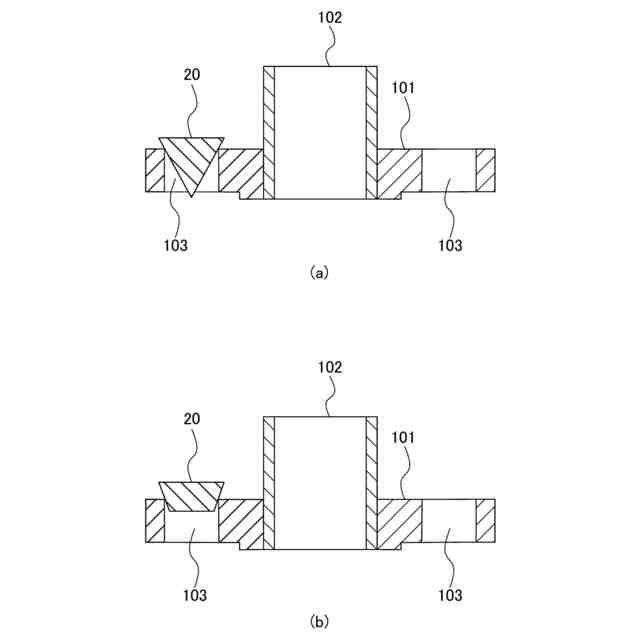
前記先端部材が前記孔部に配置された状態で、前記先端部材の中心軸が前記孔部の中心軸に一致し、
前記定規部は、側面の一部に、前記定規部の中心線を含むけがき面を有し、
前記先端部材が前記孔部に配置された状態で、前記定規部を平面視した場合に、前記定規部の中心線と前記二等分線が一致する、けがき用治具。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載のけがき用治具において、
前記先端部材は球体からなる、けがき用治具。
【請求項3】
請求項1又は2記載のけがき用治具において、
前記第1の脚部及び前記第2の脚部を把持し、かつ前記第1の脚部及び前記第2の脚部の前記先端部材が開く方向に付勢する支持部を更に備え、
前記角度調整部は、ねじ溝が刻まれたシャフトと、当該シャフトに螺合し、回転によって前記シャフトの軸方向に沿って移動する移動体と、を有し、
前記シャフトは、一端部が前記第1の脚部の内側に回動自在に取り付けられ、他端部が前記第2の脚部に形成された孔部に挿通されて前記第2の脚部の外側に延び、前記移動体が前記第2の脚部の外側の面に当接する、けがき用治具。
【請求項4】
請求項1又は2記載のけがき用治具において、
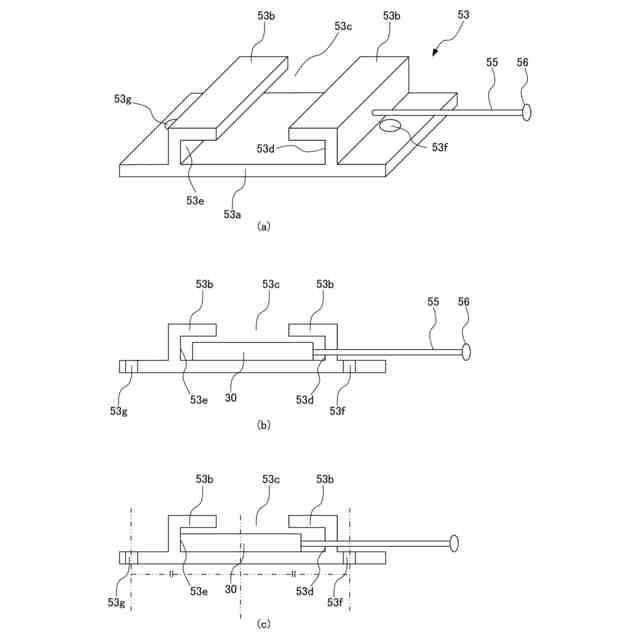
前記定規支持部は、前記第1の脚部及び前記第2の脚部の内側に一端部が回動自在に取り付けられる一対のアーム体と、一対のアーム体の他端部に回動自在に取り付けられ、前記定規部を前記定規部の長尺方向に移動可能に載置する位置決め板と、
前記定規部に対する前記位置決め板の位置を固定する固定状態及び当該固定状態を解除して前記定規部に対して前記位置決め板を移動可能にする解除状態に切り替え可能にする固定機構と、を有し、
当該位置決め板は、前記定規部の裏面が当接する平面と、前記定規部の両側面に対向する一対の壁面とを有するけがき用治具。
【請求項5】
請求項4記載のけがき用治具において、
前記定規部における前記けがき面は、前記定規部において前記一対の把持板の部位よりも他端側に形成され、
前記定規部の他端側の先端部は、前記けがき面側に向かって薄肉となる鋭角状に形成される、けがき用治具。
【請求項6】
請求項1又は2記載のけがき用治具において、
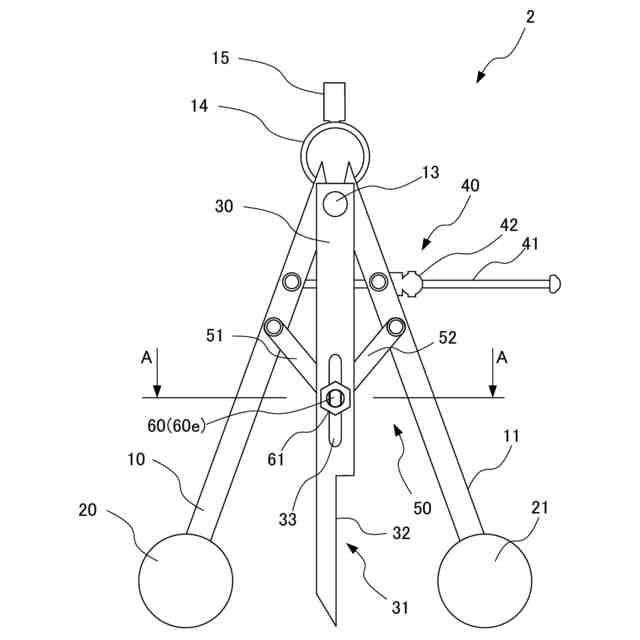
前記定規支持部は、前記第1の脚部及び前記第2の脚部の内側に一端部が回動自在に取り付けられる一対のアーム体と、当該一対のアーム体の他端部同士を回動自在に軸支する円柱状の柱状部を有し、
前記定規部は、前記定規部の中心線に沿って長手方向に延びる長孔を有し、
当該柱状部は、直径が前記長孔の幅よりも大きく、
前記柱状部の先端部は、前記長孔に挿入可能であり、前記先端部の側面に前記長孔の幅に略等しく幅で互いに対向する一対の平面部を有する、けがき用治具。
【請求項7】
請求項6記載のけがき用治具において、
前記柱状部の先端部における円弧状の側面にねじ溝が形成され、前記一対の平面部の根元部分が円弧状に形成されている、けがき用治具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フランジ等へのけがきに使用され、2つの孔部の中心をけがくためのけがき用治具に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、加工作業を行う際に、加工対象物に対して加工位置に線を引くというけがき作業が行われる。
【0003】
従来、けがき作業において使用する様々な治具が提案されている。特許文献1によれば、先端縁にけがき針を有する第一の脚部と、先端縁にうつむきに付いている面接点とそれにおよそ90°の角度で連接する倣い接点を持った接点片をそれぞれ左右に一対持つ第二の脚部、の他端をかなめピンでつないだ形になっており、面接点と倣い接点の各接点をフランジ面とその縁に軽く押し当てながら横にスライドさせて行くと、けがき針は美しいピッチサークルラインを描くけがき用具が提案されている。
【0004】
特許文献2によれば、片側の支脚先端に球体を設けたコンパスが提案されている。これにより、既に穴があけられている物体における、この穴の中心より円のけがきを簡単、容易に行うことが可能になる。
【先行技術文献】
【特許文献】
【0005】
特開平10-44067号公報
実開昭49-56600号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、フランジの中央の孔部の周囲に形成された複数のボルト穴において、隣り合うボルト穴の中心を結ぶ線の中心点をけがく場合、隣り合うボルト穴の中心に印を付けることができない。ここで、特許文献2のコンパスを用い、隣り合う孔部に球体を嵌め込んで円弧を描くことによって、隣り合うボルト穴の中心を結ぶ線の中心点を通る垂直二等分線をけがくことが可能である。例えば、隣り合うボルト穴にそれぞれコンパスの球体を嵌め入れて、コンパスを操作してフランジに円弧状の補助線を付け、2つの円弧状の補助線の交点に定規を正確に当てて垂直二等分線をけがくことが考えられる。しかし、作業は精度が求められるため、作業員にとっては難易度が高い作業となる。
【0007】
本発明は、このような問題点を解決し、2つの孔部の中心を結ぶ線の中心点をけがく作業を容易に行うことが可能なけがき用治具を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、次に記載する構成を備える。
【0009】
(1) 複数の孔部を有する物体の平板面に、2つの孔部の中心を結ぶ線の中心点をけがく際に用いるけがき用治具であって、
一端部が互いに回動可能に接続された第1の脚部、第2の脚部及び定規部と、
前記第1の脚部及び前記第2の脚部の他端部に取り付けられ、前記孔部に配置される回転体形状の先端部材と、
前記第1の脚部及び前記第2の脚部との角度を調整する角度調整部と、
前記定規部の中心軸が前記第1の脚部と前記第2の脚部とによってなされる角度の二等分線の方向に延びる状態で前記定規部を支持する定規支持部と、を備え、
前記先端部材が前記孔部に配置された状態で、前記先端部材の中心軸が前記孔部の中心軸に一致し、
前記定規部は、側面の一部に、前記定規部の中心線を含むけがき面を有し、
前記先端部材が前記孔部に配置された状態で、前記定規部を平面視した場合に、前記定規部の中心線と前記二等分線が一致する、けがき用治具。
【0010】
(1)によれば、先端部材が孔部に嵌められた状態で、定規支持部に定規部を支持させることにより、定規部の中心軸が第1の脚部と第2の脚部とによってなされる角度の二等分線の方向に延びる状態となり、定規部を平面視した場合に、2つの孔部の中心を結ぶ線の垂直二等分線上にけがき面が位置付けられる。このように、第1の脚部及び前記第2の脚部との角度を調整して先端部材を孔部に嵌めて、定規部におけるけがき面に沿ってけがくという簡単な作業で2つの孔部の中心を結ぶ線の中心点を含む垂直二等分線を物体にけがくことが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
9日前
株式会社クレスコ
補助吸着具
2日前
個人
深孔スリーブ駆動ロッド構造
22日前
株式会社エビス
腰ベルト用連結具
9日前
個人
バール
22日前
工機ホールディングス株式会社
作業機
17日前
株式会社デンソーウェーブ
ロボット制御システム
15日前
学校法人法政大学
装着型アシスト装置
19日前
アピュアン株式会社
エアー式衝撃工具
12日前
三菱電機株式会社
トルク締め個所検出システム
22日前
株式会社マキタ
インパクト工具
10日前
高丸工業株式会社
ロボット操作システムの動作方法
22日前
株式会社マキタ
インパクト工具
10日前
株式会社不二越
ロボットの教示システム及び教示方法
16日前
中国電力株式会社
電動ドライバー
16日前
SB C&S株式会社
治具セット
9日前
オムロン株式会社
モバイルロボット
16日前
オムロン株式会社
モバイルロボット
16日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
シナノケンシ株式会社
把持装置
16日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
16日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
18日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
18日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
22日前
セイコーエプソン株式会社
ロボット、及びロボットシステム
12日前
トーヨーコーケン株式会社
ワーク搬送システム
16日前
川崎重工業株式会社
指令値送信装置、制御システム、及び、指令値送信方法
22日前
株式会社デンソーウェーブ
ロボットシステム、及び折り畳み方法
19日前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
9日前
キヤノン株式会社
連続体ロボット装置および把持装置
4日前
住友重機械工業株式会社
ロボット制御装置、ロボット制御方法、記憶媒体
4日前
興和株式会社
ロボット用ハンド、ピッキングロボット及びピッキング装置
12日前
川崎重工業株式会社
ロボット教示方法、及び、教示システム
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ