TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060034
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170519
出願日
2023-09-29
発明の名称
ワーク搬送システム
出願人
トーヨーコーケン株式会社
代理人
弁理士法人友野国際特許事務所
主分類
B25J
13/00 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】バランサがロボットの協働により大重量ワークをハンドリングし、またロボットが小重量ワークをハンドリングすること。
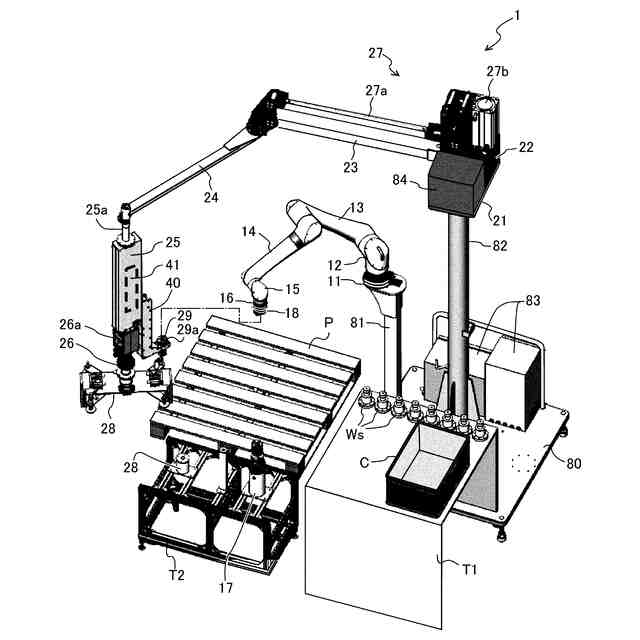
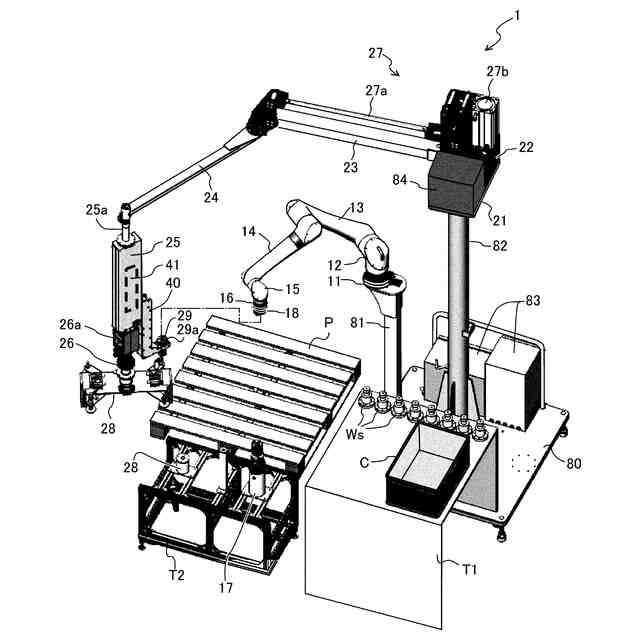
【解決手段】垂直多関節ロボット10と、常に鉛直に垂下状態で三次元移動するCアーム25を有するバランサ20とを備え、大重量ワークWrをハンドリングする際は、ロボット手首部16がロボットハンド17に替えてロボット側接続機構18を装着し、バランサ側接続機構29と連結し、バランサ20がCアーム25の下端のバランサ手首部26に装着したハンド装置28で大重量ワークWrを把持し垂直多関節ロボット10の誘導に応じてハンドリングし、小重量ワークWsをハンドリングする際は、ロボット側接続機構18とバランサ側接続機構29とを切り離してロボット手首部16がロボット側接続機構18に替えてロボットハンド17を装着し垂直多関節ロボット10単独でハンドリングする。
【選択図】図1
特許請求の範囲
【請求項1】
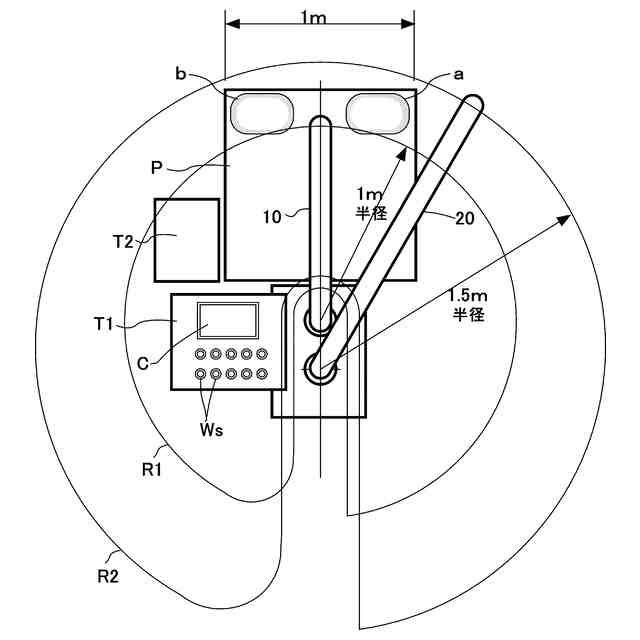
ロボット手首部にロボットハンドを装着し前記ロボットハンドによりロボット搬送が可能な小重量ワークを所要大きさの第1の動作範囲内でハンドリングする垂直多関節ロボットと、
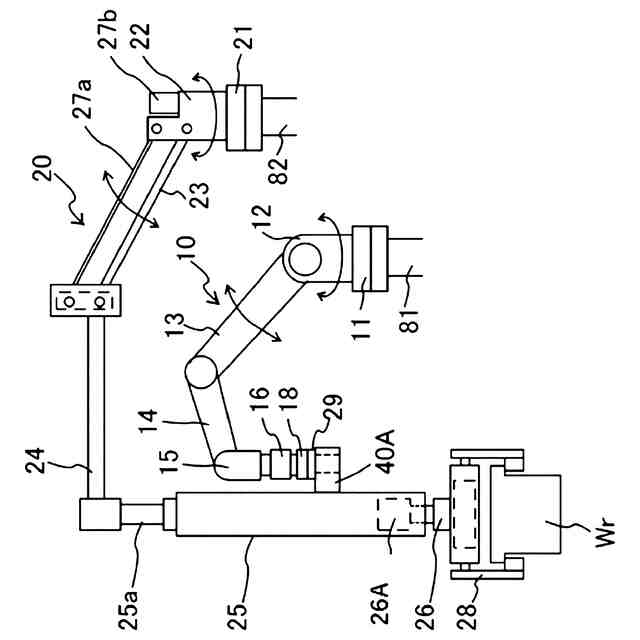
前記垂直多関節ロボットに併設されており、上端部を回転フリーに支持され常に鉛直に垂下状態で三次元移動するCアームを有し前記Cアームの下端がバランサ手首部となっており前記バランサ手首部にハンド装置を装着し、吊り上げバランス機構により前記ハンド装置で前記小重量ワークのハンドリングの間またはロボット搬送が不可能な前記大重量ワークを把持する状態の前後において静止状態を保持し、前記Cアームに連結される前記垂直多関節ロボットの誘導に応じて前記大重量ワークを前記第1の動作範囲を包含する所要大きさの第2の動作範囲内でハンドリングする多関節構造のバランサとを備え、
前記ロボット手首部は前記ロボットハンドに替えてロボット側接続機構をチャックおよびチャック解除でき、さらに、前記ロボット手首部にチャックされた前記ロボット側接続機構は前記バランサ手首部の側方に備えるバランサ側接続機構をチャックおよびチャック解除でき、
前記大重量ワークをハンドリングする際は、前記ロボット手首部が前記ロボット側接続機構を装着し、前記バランサ側接続機構と連結し、前記バランサ手首部に装着した前記ハンド装置で前記大重量ワークを把持し前記バランサが前記垂直多関節ロボットの誘導に応じてハンドリングし、また前記小重量ワークをハンドリングする際は、前記ロボット側接続機構を前記バランサ側接続機構から切り離しさらに前記ロボット手首部が前記ロボット側接続機構を切り離して前記ロボットハンドを装着し前記垂直多関節ロボットが単独でハンドリングする
ことを特徴とするワーク搬送システム。
続きを表示(約 1,600 文字)
【請求項2】
回転フリーな前記Cアームの下端に設けられた前記ハンド装置が、前記Cアームに対し同軸上で回転フリーに設けられかつ前記Cアームに付設された手首部回動用アクチュエータにより、前記Cアームに対しワークの姿勢に合わせて所要角度回動するよう設けられていることを特徴とする請求項1に記載のワーク搬送システム。
【請求項3】
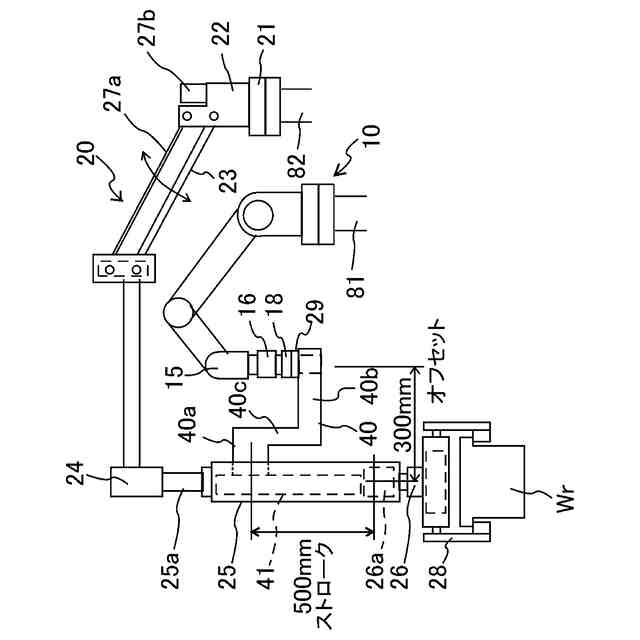
前記Cアームに沿って上下方向に所要寸法ストローク可能に案内された上端水平部と、ロボット手首軸の方向に延在している下端水平部と、前記上端水平部と前記下端水平部とを所要距離隔てて一体に連結している中間連結部とからなる接続機構支持部と、前記Cアームに付設されたアクチュエータとを有し、前記アクチュエータにより前記上端水平部が下降位置と上昇位置のいずれかに位置決めされ、前記バランサ側接続機構が前記下端水平部の張出端に設けられていることにより前記バランサ側接続機構の中心が前記Cアームの中心から所要寸法オフセットしていることを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項4】
前記Cアームの下部側面よりロボット手首軸の方向に水平に突設された所要長さの水平張出ブラケットを有し、前記水平張出ブラケットの張出端に前記バランサ側接続機構が設けられ、前記バランサ側接続機構の中心が前記Cアームの中心から所要寸法オフセットしていることを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項5】
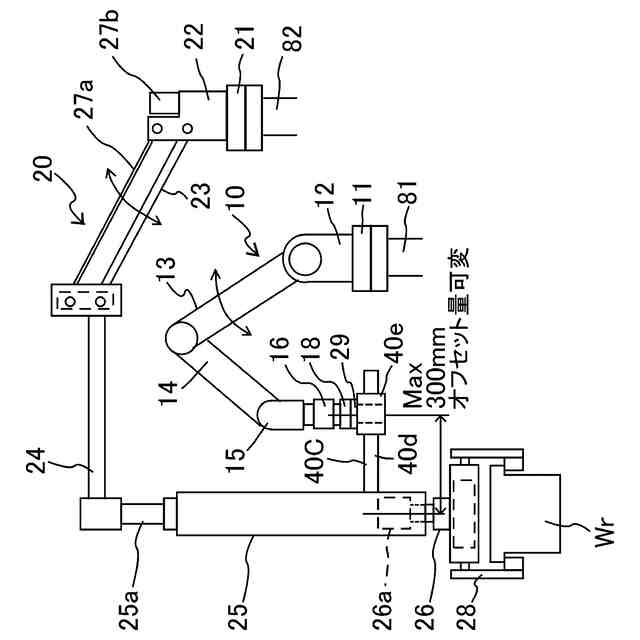
前記Cアームの下部側面よりロボット手首軸の方向に水平張出状態に突設された所要長さの水平ガイドと、前記水平ガイドにスライド可能で適宜位置で固定される水平可動ブロックとを有し、前記水平可動ブロックに前記バランサ側接続機構が設けられ、前記バランサ側接続機構の中心が前記Cアームの中心から可変寸法オフセットすることを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項6】
前記Cアームの側面に付設された上下方向ガイドと、前記上下方向ガイドに案内され適宜の高さ位置で固定される昇降ブロックとを有し、前記昇降ブロックに前記バランサ側接続機構が設けられていることを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項7】
前記接続機構支持部に替えて、前記Cアームの下端に固定して設けられたバランサ側接続機構と、前記Cアームの前記下側バランサ側接続機構に近接する上位置から所要寸法高い位置まで昇降スライド自在に設けられた平面的に干渉しないよう位置する第2バランサ側接続機構とを有することを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項8】
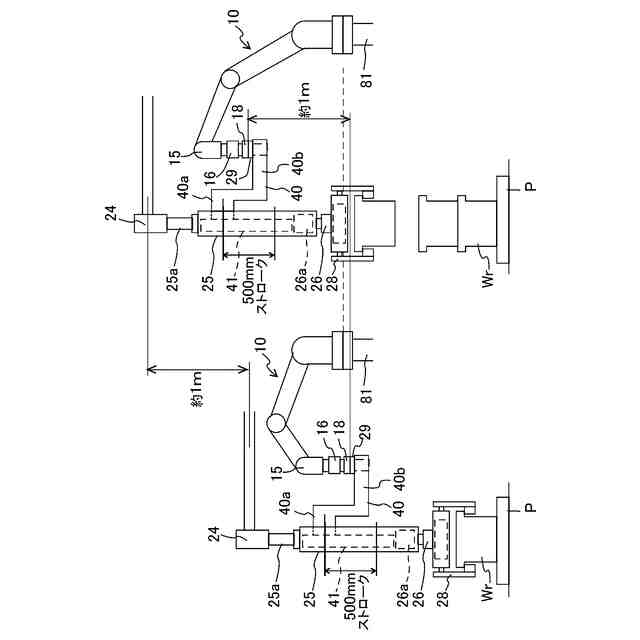
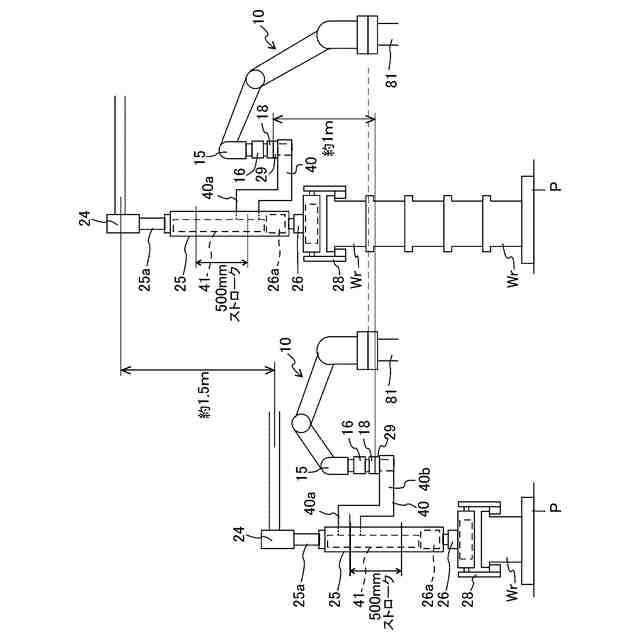
前記垂直多関節ロボットが所要高さの第1固定ポストの上に設置され、前記バランサが前記第1固定ポストよりも所要高い第2固定ポストの上に設置され、前記垂直多関節ロボットと前記バランサとが協働して前記大重量ワークをハンドリングする際、アーム同士が干渉しないよう、前記バランサ側の複数のアームが前記垂直多関節ロボット側の複数のアームの外側を動作することを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項9】
前記垂直多関節ロボットが単独でテーブル上に置かれる複数の前記小重量ワークを次々にハンドリングして箱詰めし、大重量ワークの箱詰め体となり、さらに、テーブル上で次々に箱詰め体とされた複数の大重量ワークを前記バランサの前記ハンド装置により床置きされるパレット上に次々に積載する際の、前記テーブルと前記パレットを含むことを特徴とする請求項1または2に記載のワーク搬送システム。
【請求項10】
小重量ワーク搬送用コンベアと第2小重量ワーク搬送用コンベアと大重量ワーク搬送用コンベアを前記垂直多関節ロボットの動作範囲内に配設したことを特徴とする請求項1または2に記載のワーク搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願発明はたとえばワーク搬送システムに係り、特に、バランサと垂直多関節ロボットとでそれぞれ別々にワークを搬送し、および協働してワークを搬送するワーク搬送システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示された搬送装置は、多関節構造のバランサと垂直多関節ロボットとを備え、バランサとロボットの先端同士が接続機構により接続され、バランサの先端に備えるハンド装置でワークを把持し、垂直多関節ロボットがワークの荷重負担がほぼ無い状態でハンド装置を誘導し、もってワークを搬送することができる。ワークをハンドリングする際は、前記バランサ側の動作が前記垂直多関節ロボット側の動作の外側で行い、垂直多関節ロボットとバランサとが干渉しない。
【先行技術文献】
【特許文献】
【0003】
特開2009-262304号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、例えば、複数の小型で小重量の物品を速いタクトで箱内に整列して詰め込む作業と、続いて、複数の物品を詰め込んだ大重量である箱を、例えば、1m四方のパレット上に遅いタクトでもよいので高さ1mまで積み上げる作業とを同一の作業エリアで行いたいというニーズが存在する。
【0005】
昨今では、安全性能が高く作業者と共有エリアで運転が可能な協働ロボットの採用の機会が高まっている。また、省エネ、省スペースの要求からできるだけ小さな出力のロボットを使いたいということも多い。そこで、特許文献1に開示されたワーク搬送装置において協働ロボットを含む出力の小さい小型の垂直多関節ロボットで適用できるかを検討したところ、物品を箱内に詰め込む作業については適用することができるが、物品を詰め込んだ箱をパレット上に積み上げる作業については適用が難しいことが分かった。
【0006】
本発明は上述したこれまでの問題点を解決することを企図したものである。すなわち、本願発明の主たる目的は、垂直多関節ロボットとバランサとを備え、連結した状態で多関節ロボットがワークの荷重負担がほぼ無い状態でバランサの先端部を誘導しバランサが大重量ワークをハンドリングすることができ、また多関節ロボットが、バランサの先端との連結を解いて小重量ワークを速いタクトでハンドリングすることができるワーク搬送システムを提供することにある。
【0007】
本願発明の他の目的は、バランサのハンド装置を、ワークの掴み取りおよび積み下ろしに際しワークの置かれているまたは置くべき平面視姿勢に合わせて方向を容易に変えることができる搬送システムを提供することにある。
【0008】
本願発明のさらなる他の目的は、バランサの独立した第2の作業範囲が垂直多関節ロボットの第1の作業範囲よりも大きくかつ包含するにもかかわらず、垂直多関節ロボットとバランサとが連結した状態では、バランサの作業範囲が第1の作業範囲内に狭く制限されるという不都合があり、垂直多関節ロボットの誘導による場合もバランサの作業範囲が第1の作業範囲を拡大した範囲に及ぶように改良した搬送システムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題の解決に当たり、本発明者らは、小型の垂直多関節ロボットで搬送が可能な複数の小重量のワークを速いタクトでハンドリングする必要がある作業については小型の垂直多関節ロボット単独で行い、大重量のワークの搬送作業についてはバランサと小型の垂直多関節ロボットとが連結し遅いタクトでもよいので作業を安全に行うことができる搬送システムを発案し、同システムの開発に鋭意に取り組んだ。その結果、本願発明を案出したものである。
【0010】
さらに、本発明者らは、バランサと垂直多関節ロボットとが連結した状態でバランサがパレット上にワークを積み下ろす場合に、ワークを同一方向に向けてパレット上に積み上げるとパレットに横揺れが生じたときにワークが容易に崩れ落ちる恐れがあるので、ワークを一段ごとに90°異なる方向に向けてパレット上に積み上げる必要があり、この作業での平面的な姿勢を合わせるために多くの時間がかかってしまうことが分かった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
17日前
株式会社アイセイ
搬送装置
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
10日前
株式会社不二越
ロボット
2日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社エビス
腰ベルト用連結具
17日前
川崎重工業株式会社
ロボット
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
25日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社デンソー
操縦桿
1か月前
株式会社イノウ
給油口キャップ用開閉具
3日前
川崎重工業株式会社
制動システム
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社不二越
基板搬送用ロボット
1か月前
ARMA株式会社
UI付エンドエフェクタ
1か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社不二越
垂直多関節ロボット
3日前
アイホン株式会社
ネジ締めカウントシステム
4日前
パナソニック株式会社
工具
3日前
パナソニック株式会社
工具
3日前
株式会社デンソーウェーブ
ロボット制御システム
23日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
アピュアン株式会社
エアー式衝撃工具
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































