TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025033534
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023139303
出願日
2023-08-29
発明の名称
電動工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25F
5/00 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作表示部のパネルの視認性を向上し、操作表示部のパネルの耐久性を向上すること。
【解決手段】電動工具は、モータと、モータを収容するモータ収容部と、モータ収容部から延びるグリップ部と、モータに電力を供給するためのバッテリが取り付けられるバッテリ保持部と、グリップ部とバッテリ保持部との間に配置される弾性体と、バッテリ保持部の後部に配置され、モータの制御方法の変更のために操作されるパネルと、を備える。
【選択図】図15
特許請求の範囲
【請求項1】
モータと、
前記モータを収容するモータ収容部と、
前記モータ収容部から延びるグリップ部と、
前記モータに電力を供給するためのバッテリが取り付けられるバッテリ保持部と、
前記グリップ部と前記バッテリ保持部との間に配置される弾性体と、
前記バッテリ保持部の後部に配置され、前記モータの制御方法の変更のために操作されるパネルと、を備える、
電動工具。
続きを表示(約 670 文字)
【請求項2】
前記バッテリ保持部の前部に配置されるライトを備える、
請求項1に記載の電動工具。
【請求項3】
前記パネルを支持する樹脂部を備える、
請求項1に記載の電動工具。
【請求項4】
前記パネルは、前記樹脂部に接触する、
請求項3に記載の電動工具。
【請求項5】
前記パネルは、前記樹脂部に固定される、
請求項3に記載の電動工具。
【請求項6】
前記パネルは、回路基板に対向し、
前記樹脂部は、前記回路基板を保持する、
請求項3に記載の電動工具。
【請求項7】
前記パネルは、弾性変形部を有し、
前記回路基板は、前記弾性変形部が押されることにより操作されるスイッチ素子を支持する、
請求項6に記載の電動工具。
【請求項8】
前記パネルは、光透過部を有し、
前記回路基板は、前記光透過部に光を照射する発光素子を支持する、
請求項6に記載の電動工具。
【請求項9】
バッテリからの電力が供給される本体側端子を含むバッテリ装着部を備え、
前記バッテリ装着部は、前記バッテリ保持部に配置される、
請求項1に記載の電動工具。
【請求項10】
前記グリップ部の前部に設けられ、前記モータを起動するために操作されるトリガレバーを備える、
請求項1に記載の電動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、電動工具に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
電動工具に係る技術分野において、特許文献1に開示されているような、操作表示部を備える電動工具が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2023-020813号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示する技術は、操作表示部のパネルの視認性を向上し、操作表示部のパネルの耐久性を向上することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、電動工具を開示する。電動工具は、モータと、モータを収容するモータ収容部と、モータ収容部から延びるグリップ部と、モータに電力を供給するためのバッテリが取り付けられるバッテリ保持部と、グリップ部とバッテリ保持部との間に配置される弾性体と、バッテリ保持部の後部に配置され、モータの制御方法の変更のために操作されるパネルと、を備えてもよい。
【発明の効果】
【0006】
本明細書で開示する技術によれば、操作表示部のパネルの視認性が向上し、操作表示部のパネルの耐久性が向上する。
【図面の簡単な説明】
【0007】
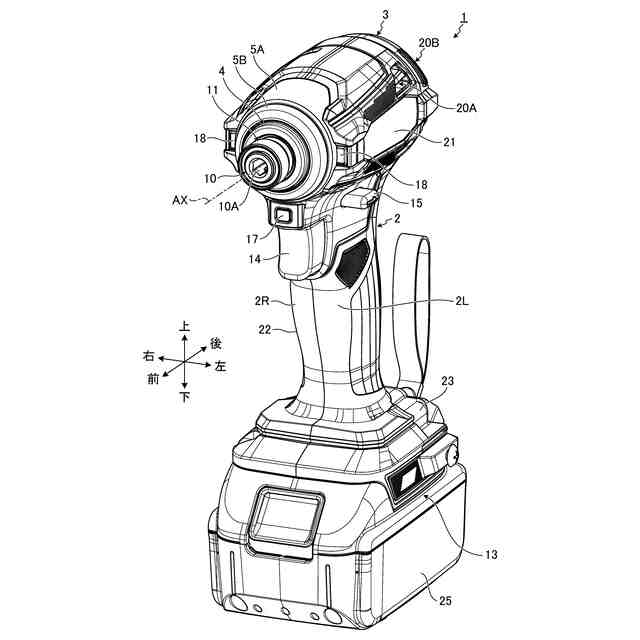
図1は、実施形態に係る電動工具を示す前方からの斜視図である。
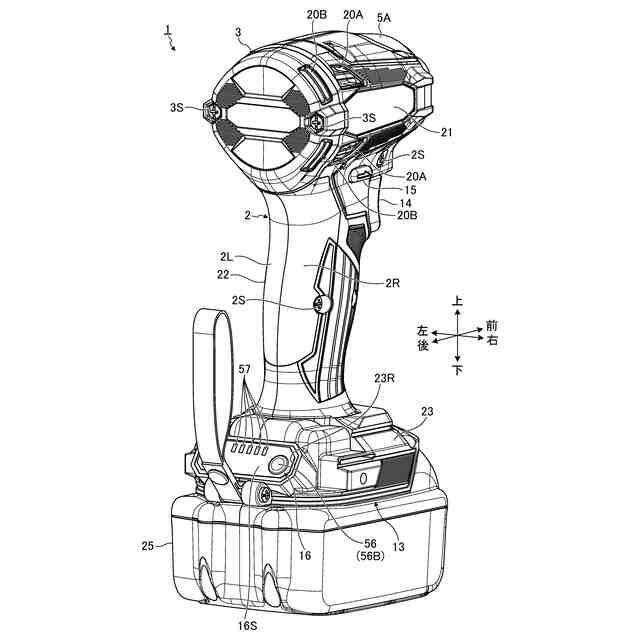
図2は、実施形態に係る電動工具を示す後方からの斜視図である。
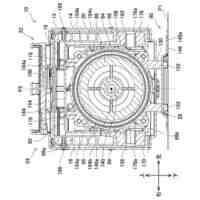
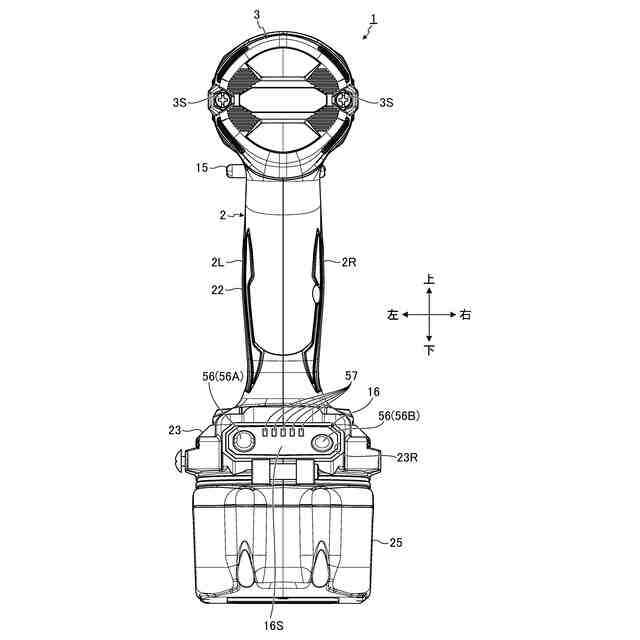
図3は、実施形態に係る電動工具を示す後面図である。
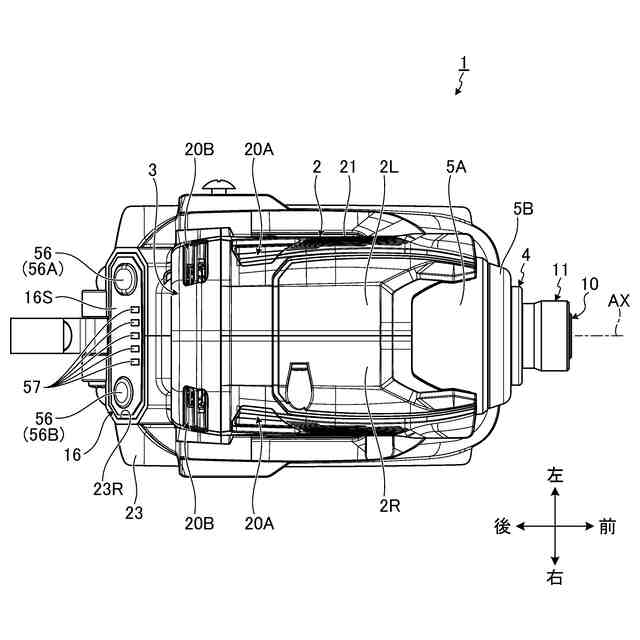
図4は、実施形態に係る電動工具を示す上面図である。
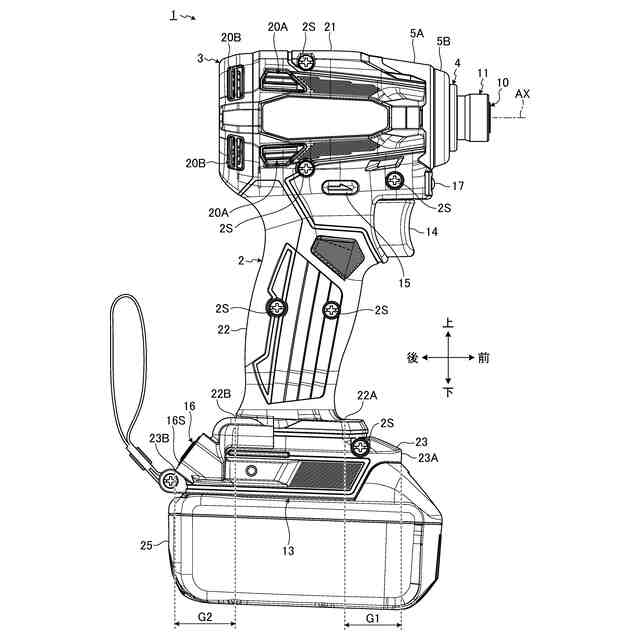
図5は、実施形態に係る電動工具を示す右側面図である。
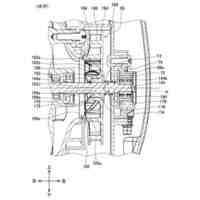
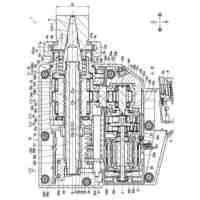
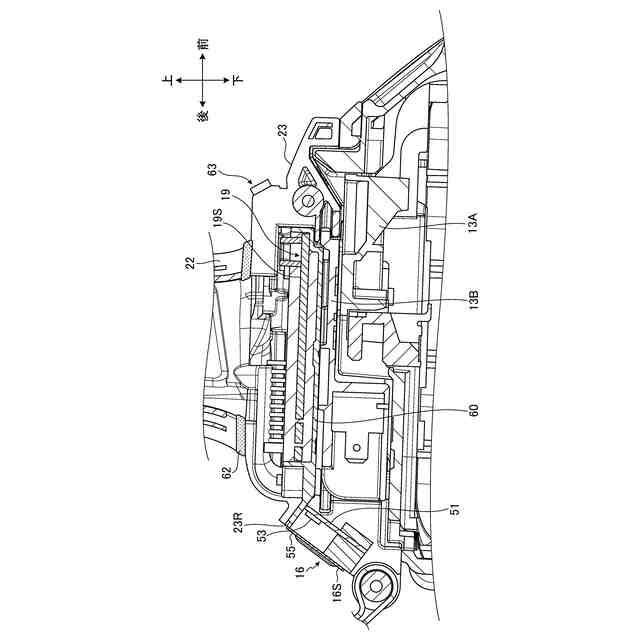
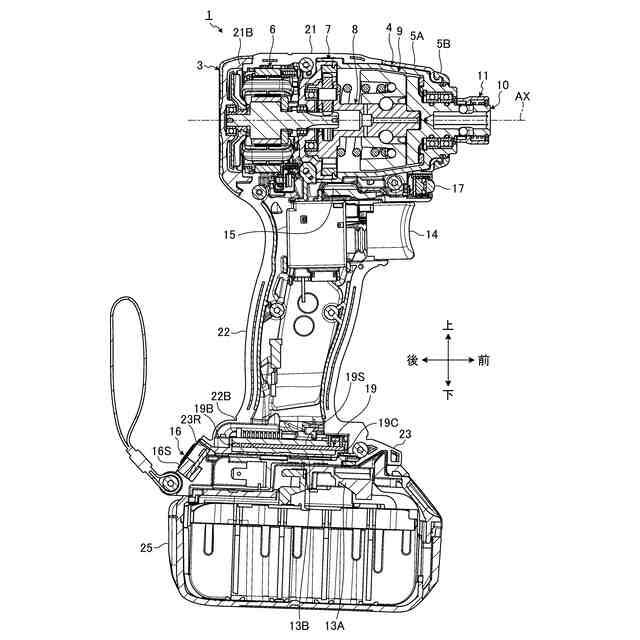
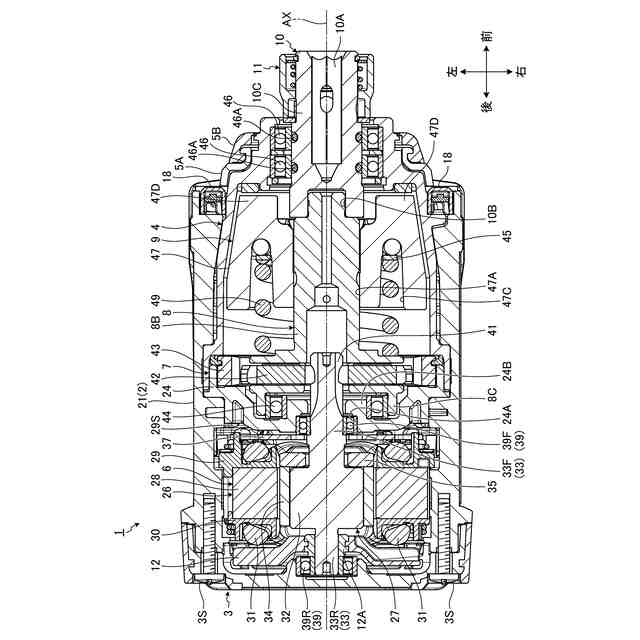
図6は、実施形態に係る電動工具を示す縦断面図である。
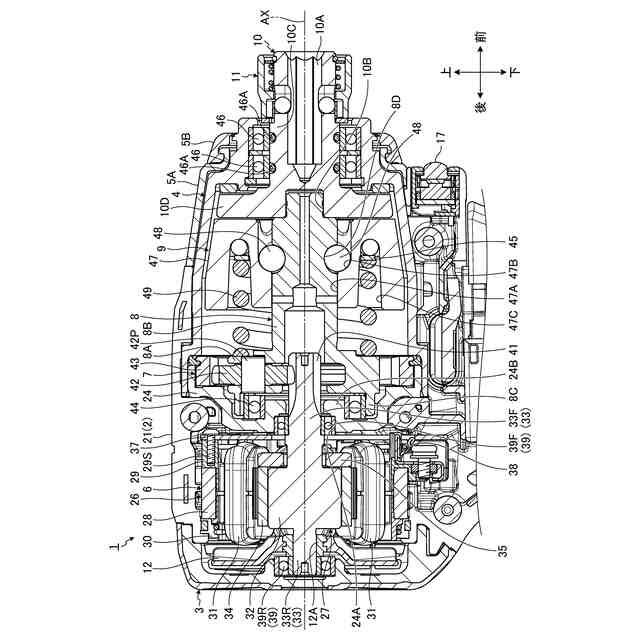
図7は、実施形態に係る電動工具の上部を示す縦断面図である。
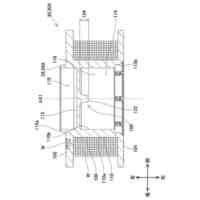
図8は、実施形態に係る電動工具の上部を示す横断面図である。
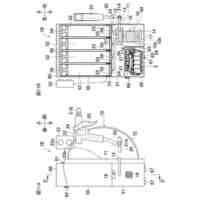
図9は、実施形態に係る電動工具の下部を示す縦断面図である。
図10は、実施形態に係る電動工具の下部を示す後面図である。
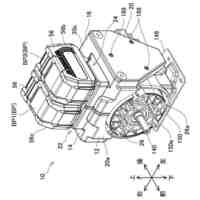
図11は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
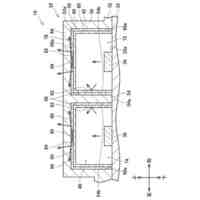
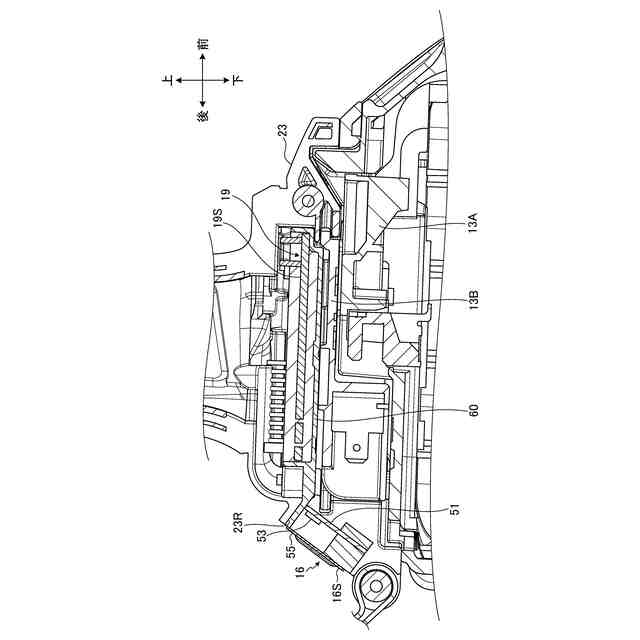
図12は、実施形態に係る電動工具の操作表示部を示す断面図である。
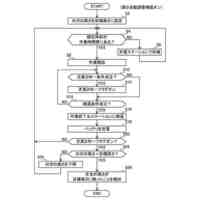
図13は、実施形態に係る電動工具を示すブロック図である。
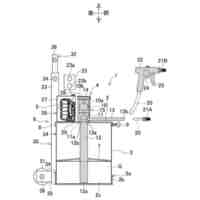
図14は、実施形態に係る電動工具の下部を示す縦断面図である。
図15は、実施形態に係る電動工具の下部を示す縦断面図である。
図16は、実施形態に係る電動工具の変形例を示す図である。
図17は、実施形態に係る電動工具の一部を示す分解斜視図である。
図18は、実施形態に係る電動工具の変形例の一部を示す断面図である。
図19は、実施形態に係る電動工具の変形例の一部を示す分解斜視図である。
図20は、実施形態に係る電動工具の下部を示す縦断面図である。
図21は、実施形態に係る電動工具を示す縦断面図である。
図22は、実施形態に係る制御回路基板及びトリガレバーの変形例を示す斜視図である。
図23は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
図24は、実施形態に係る電動工具を示す縦断面図である。
図25は、実施形態に係る電動工具を示す後面図である。
図26は、実施形態に係る電動工具を示す前方からの分解斜視図である。
図27は、実施形態に係る電動工具の下部を示す縦断面図である。
図28は、実施形態に係る制御回路基板を示す斜視図である。
図29は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
図30は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
図31は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
図32は、実施形態に係る電動工具の下部を示す後方からの斜視図である。
図33は、実施形態に係る電動工具を示す後面図である。
図34は、実施形態に係る電動工具を示すブロック図である。
図35は、実施形態に係る電動工具を示す右側面図である。
図36は、実施形態に係る制御回路基板及びパネルを模式的に示す図である。
図37は、実施形態に係る電動工具を示す後面図である。
図38は、実施形態に係る電動工具を示す後方からの斜視図である。
図39は、実施形態に係る電動工具を示す後方からの斜視図である。
図40は、実施形態に係る電動工具を示す前方からの斜視図である。
図41は、実施形態に係る電動工具を模式的に示す側面図である。
図42は、実施形態に係る電動工具の一部を模式的に示す図である。
図43は、実施形態に係る電動工具の一部を示す後方からの斜視図である。
図44は、実施形態に係る電動工具の一部を示す縦断面図である。
図45は、実施形態に係るモータ収容部の内部空間に配置された制御回路基板を示す図である。
図46は、実施形態に係るグリップ部の内部空間に配置された制御回路基板を示す図である。
図47は、実施形態に係るバッテリ保持部の内部空間に配置された制御回路基板を示す図である。
図48は、実施形態に係る支え部の内部空間に配置された制御回路基板を示す図である。
【発明を実施するための形態】
【0008】
1つ又はそれ以上の実施形態において、電動工具は、モータと、モータを収容するモータ収容部と、モータ収容部から延びるグリップ部と、モータに電力を供給するためのバッテリが取り付けられるバッテリ保持部と、グリップ部とバッテリ保持部との間に配置される弾性体と、バッテリ保持部の後部に配置され、モータの制御方法の変更のために操作されるパネルと、を備えてもよい。
【0009】
上記の構成では、弾性体により、モータの振動がパネルに伝達されることが抑制される。そのため、パネルの視認性が向上し、パネルの耐久性が向上する。
【0010】
1つ又はそれ以上の実施形態において、電動工具は、バッテリ保持部の前部に配置されるライトを備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
11日前
株式会社マキタ
作業機
11日前
株式会社マキタ
表示装置
1か月前
株式会社マキタ
クリーナ
1か月前
株式会社マキタ
管拡径工具
4日前
株式会社マキタ
打ち込み工具
4日前
株式会社マキタ
作業ロボット
12日前
株式会社マキタ
作業ロボット
12日前
株式会社マキタ
モータユニット
20日前
株式会社マキタ
インパクト工具
18日前
株式会社マキタ
インパクト工具
18日前
株式会社マキタ
グリース吐出装置
3日前
株式会社マキタ
自律移動システム
12日前
株式会社マキタ
鉄筋結束機およびリール
18日前
株式会社マキタ
モータユニットおよび作業機
20日前
株式会社マキタ
グリース吐出装置及びグリース注油システム
3日前
株式会社マキタ
インパクト工具、スピンドル及びスピンドルの製造方法
19日前
OMC株式会社
ロボット
17日前
株式会社クレスコ
補助吸着具
10日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
2日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
17日前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
25日前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
1か月前
株式会社イノウ
給油口キャップ用開閉具
3日前
川崎重工業株式会社
制動システム
2日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ