TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025065857
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175348
出願日
2023-10-10
発明の名称
作業ロボット
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/43 20240101AFI20250415BHJP(制御;調整)
要約
【課題】作業ロボットによる作業を円滑に進行させることが可能な技術を提供する。
【解決手段】作業ロボットは、自律移動しながら作業を行う。作業ロボットは、ベースおよびベースに支持されるバンパを含むロボット本体と、ベースに支持される作業部と、ベースを移動させる移動機構と、移動機構を駆動する移動用モータと、バンパが受ける力またはベースに対するバンパの変位を検出する第1検出部と、ベースの角速度または移動用モータの状態を検出する第2検出部と、制御部と、を備える。制御部は、第1検出部の検出結果と第2検出部の検出結果に基づいて、作業ロボットの移動が障害物に妨げられているか否かを判定可能に構成される。
【選択図】図10
特許請求の範囲
【請求項1】
自律移動しながら作業を行う作業ロボットであって、
ベースと、前記ベースに支持されるバンパと、を含むロボット本体と、
前記ベースに支持される作業部と、
前記ベースを移動させる移動機構と、
前記移動機構を駆動する移動用モータと、
前記バンパが受ける力または前記ベースに対する前記バンパの変位を検出する第1検出部と、
前記ベースの角速度または前記移動用モータの状態を検出する第2検出部と、
制御部と、を備えており、
前記制御部は、前記第1検出部の検出結果と前記第2検出部の検出結果に基づいて、前記作業ロボットの移動が障害物に妨げられているか否かを判定可能に構成される、作業ロボット。
続きを表示(約 740 文字)
【請求項2】
前記制御部は、
少なくとも前記第1検出部の検出結果に基づいて、前記作業ロボットの移動が前記障害物に妨げられているか否かを判定する第1妨害判定処理と、
前記第1妨害判定処理で前記作業ロボットの移動が前記障害物に妨げられていると判定された後、前記障害物を避けて移動するための回避動作を前記作業ロボットが行うように、前記移動用モータを動作させる回避処理と、
前記作業ロボットが前記回避動作を行なっている間、少なくとも前記第2検出部の検出結果に基づいて、前記作業ロボットの移動が前記障害物に妨げられているか否かを判定する第2妨害判定処理と、を実行可能に構成される、請求項1の作業ロボット。
【請求項3】
前記回避動作は、前記作業ロボットが旋回する旋回動作を含む、請求項2の作業ロボット。
【請求項4】
前記回避動作は、前記作業ロボットが直進する直進動作を含む、請求項2または3の作業ロボット。
【請求項5】
前記移動用モータの状態は、前記移動用モータに流れる電流を含み、
前記第2検出部は、前記移動用モータに流れる電流を検出するモータ電流検出部を含む、請求項1から4の何れか一項の作業ロボット。
【請求項6】
前記制御部は、前記モータ電流検出部の検出値が所定電流値以上となる状況が所定時間以上継続する場合に、前記作業ロボットの移動が前記障害物に妨げられていると判定する、請求項5の作業ロボット。
【請求項7】
前記作業部は、芝生を刈り込むための刈刃を備えており、
ロボット芝刈機として機能する、請求項1から6の何れか一項の作業ロボット。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業ロボットに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、自律移動しながら作業を行う作業ロボットが開示される。前記作業ロボットは、ベースおよび前記ベースに支持されるバンパを含むロボット本体と、前記ベースに支持される作業部と、前記ベースを移動させる移動機構と、前記移動機構を駆動する移動用モータと、前記バンパが受ける力または前記ベースに対する前記バンパの変位を検出する第1検出部と、制御部と、を備える。制御部は、前記第1検出部の検出結果に基づいて、前記作業ロボットの移動が前記障害物に妨げられているか否かを判定可能に構成される。
【先行技術文献】
【特許文献】
【0003】
特開平09-325812号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業ロボットの制御部は、作業ロボットの移動が障害物に妨げられていると判定することに応じて、作業ロボットに、障害物を避けて移動するための回避動作を行なわせることがある。この場合、作業ロボットの移動が障害物に妨げられているか否かについての判定精度が悪いと、作業ロボットが障害物を回避することが困難になり得る。例えば、作業ロボットが障害物を回避するために時間を要する。その結果、作業ロボットによる作業が円滑に進行しないおそれがある。本明細書では、作業ロボットによる作業を円滑に進行させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業ロボットは、自律移動しながら作業を行う。前記作業ロボットは、ベースおよび前記ベースに支持されるバンパを含むロボット本体と、前記ベースに支持される作業部と、前記ベースを移動させる移動機構と、前記移動機構を駆動する移動用モータと、前記バンパが受ける力または前記ベースに対する前記バンパの変位を検出する第1検出部と、前記ベースの角速度または前記移動用モータの状態を検出する第2検出部と、制御部と、を備える。前記制御部は、前記第1検出部の検出結果と前記第2検出部の検出結果に基づいて、前記作業ロボットの移動が前記障害物に妨げられているか否かを判定可能に構成される。
【0006】
上記の構成によれば、作業ロボットの制御部は、バンパが受ける力またはベースに対するバンパの変位に基づくだけでなく、ベースの角速度または移動用モータの状態にも基づいて、作業ロボットの移動が障害物に妨げられているか否かを判定することができる。これにより、作業ロボットの移動が障害物に妨げられているか否かについての判定精度を向上することができるので、作業ロボットは障害物を容易に回避することができる。従って、上記の構成によれば、作業ロボットによる作業を円滑に進行させることができる。
【図面の簡単な説明】
【0007】
実施例1に係るロボット芝刈機2の使用例を示す図である。
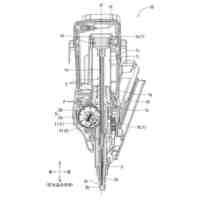
実施例1に係るロボット芝刈機2の左側面図である。
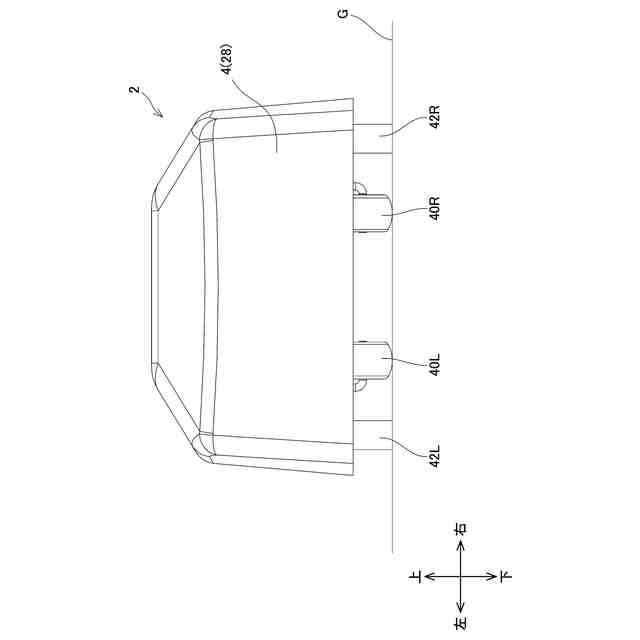
実施例1に係るロボット芝刈機2の背面図である。
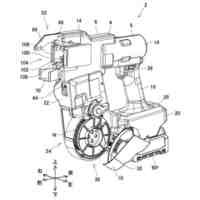
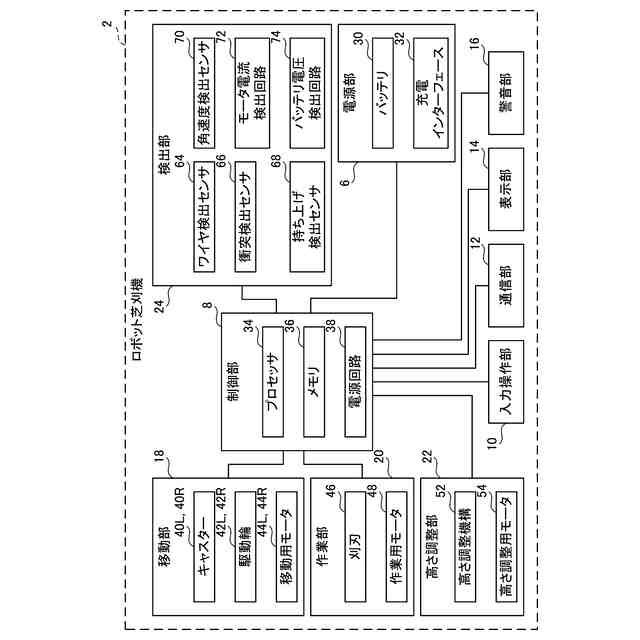
実施例1に係るロボット芝刈機2の概略構成図である。
実施例1に係るロボット芝刈機2の衝突検出センサ66の近傍の構成を概略的に示す図である。
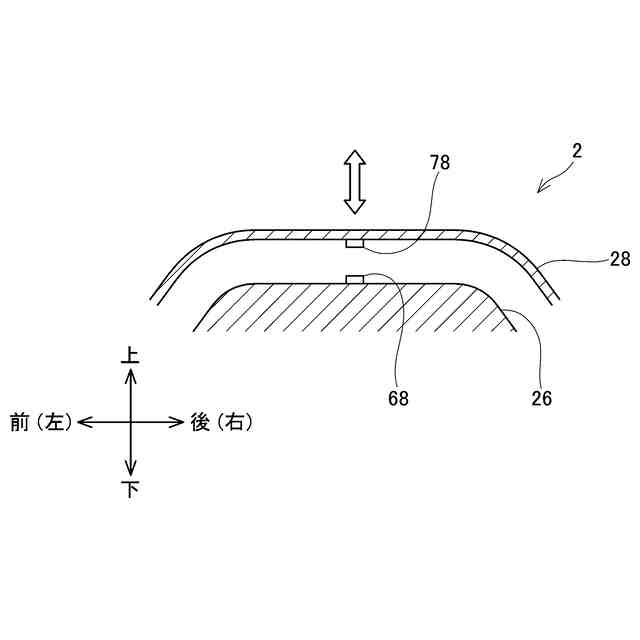
実施例1に係るロボット芝刈機2の持ち上げ検出センサ68の近傍の構成を概略的に示す図である。
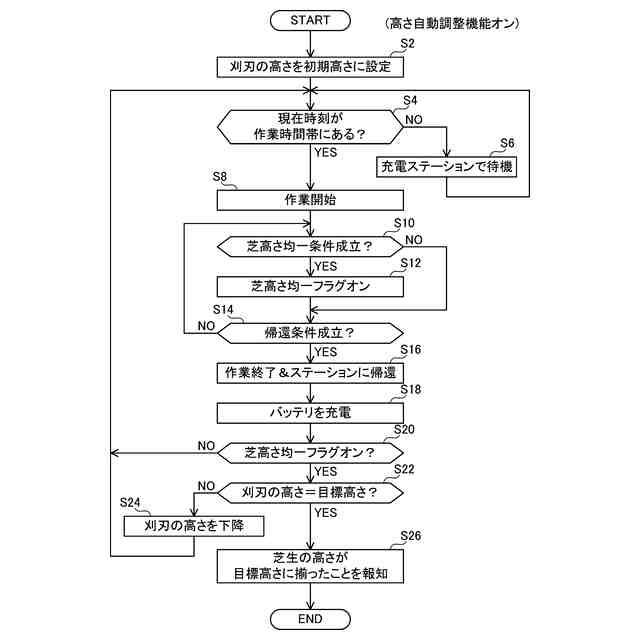
実施例1に係るロボット芝刈機2の制御部8が実行する、高さ自動調整機能がオンとなっている場合の自律運転のフローチャートである。
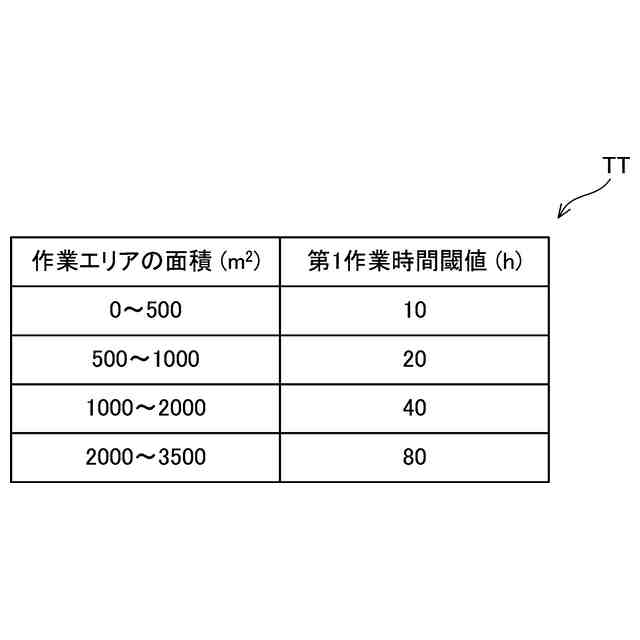
実施例1に係るロボット芝刈機2の制御部8のメモリ36に記憶される閾値テーブルTTを模式的に示す図である。
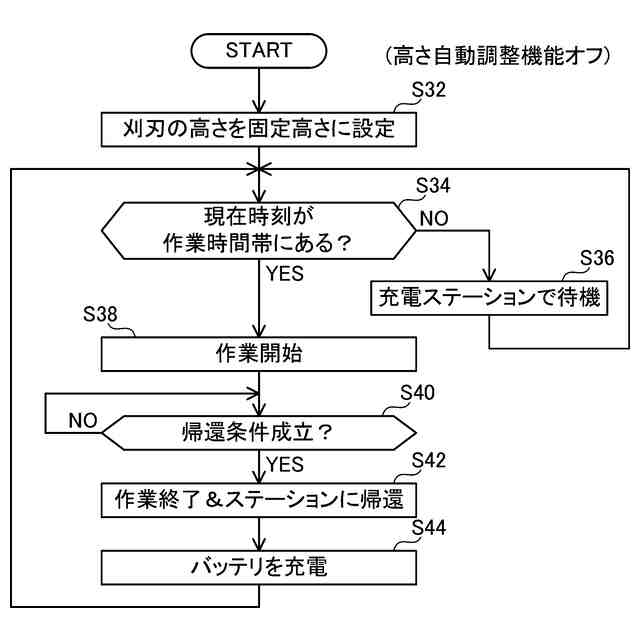
実施例1に係るロボット芝刈機2の制御部8が実行する、高さ自動調整機能がオフとなっている場合の自律運転のフローチャートである。
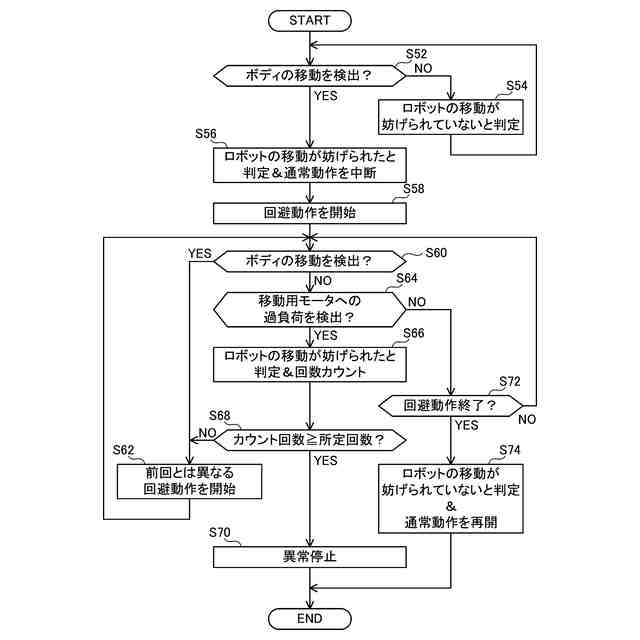
実施例1に係るロボット芝刈機2が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例2に係るロボット芝刈機202が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例3に係るロボット芝刈機302が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例4に係るロボット芝刈機402の制御部8が実行する、高さ自動調整機能がオンとなっている場合の自律運転のフローチャートである。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業ロボットを提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動作業機
12日前
株式会社マキタ
電動作業機
12日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
鉄筋結束機、鉄筋の結束方法および鉄筋結束機の使用方法
18日前
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
2か月前
株式会社クボタ
作業車
2か月前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送車
2か月前
株式会社ダイフク
搬送設備
17日前
三栄ハイテックス株式会社
基準電圧回路
2日前
トヨタ自動車株式会社
ペダル機構
16日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
三菱電機株式会社
自己位置推定装置
26日前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
24日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
17日前
WHILL株式会社
電動モビリティ
25日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
24日前
ローム株式会社
半導体装置
5日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
1か月前
株式会社アイシン
自律移動体
1か月前
ミツミ電機株式会社
多方向入力装置
2か月前
株式会社アイシン
自律移動体
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ