TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044642
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152342
出願日
2023-09-20
発明の名称
半導体集積回路
出願人
ローム株式会社
代理人
個人
,
個人
主分類
G05F
1/56 20060101AFI20250326BHJP(制御;調整)
要約
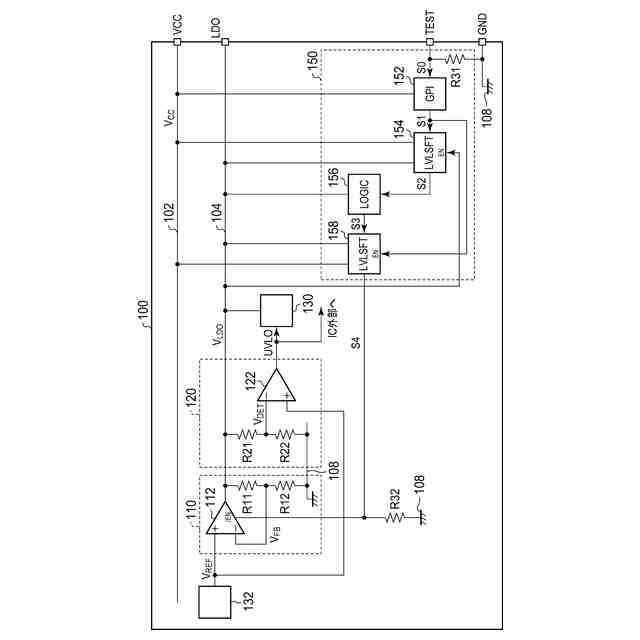
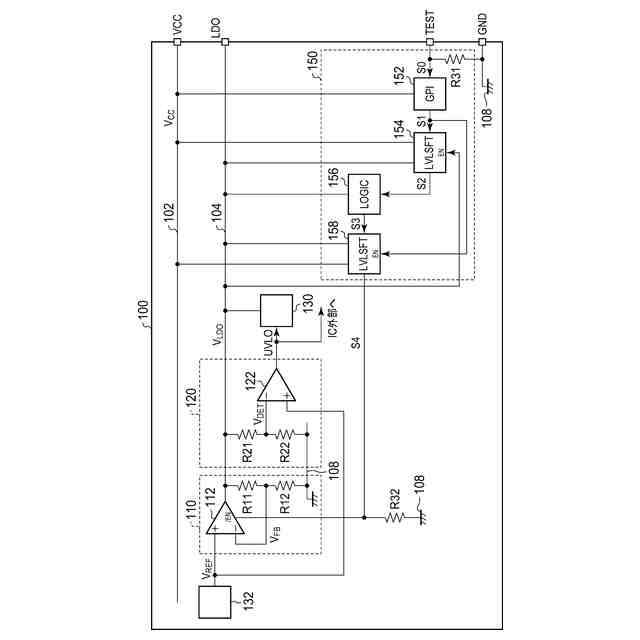
【課題】リニアレギュレータの出力電圧を監視するUVLO回路を試験可能な半導体集積回路を提供する。
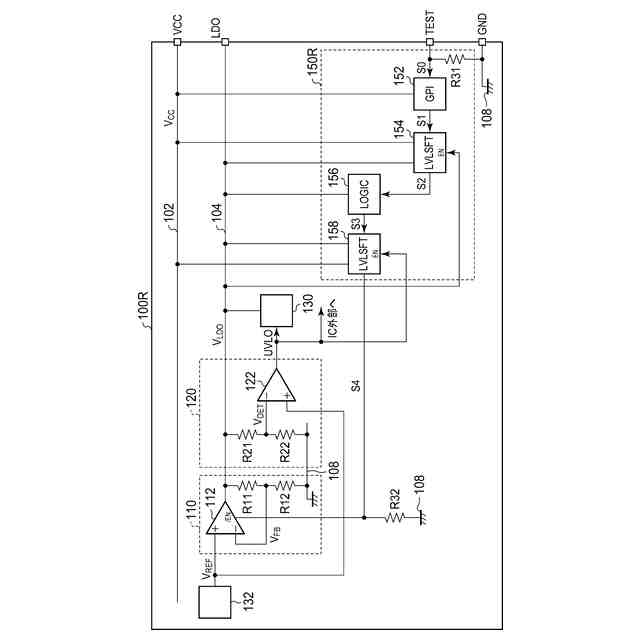
【解決手段】リニアレギュレータ110は、イネーブル信号S4に応じてイネーブル状態とディセーブル状態が切り替え可能であり、イネーブル状態において、定電圧V
LDO
を生成する。第1レベルシフタ154は、バッファ152の出力を、定電圧V
LDO
をハイレベルとする信号S2にレベルシフトする。ロジック回路156は、定電圧V
LDO
を電源として動作するように構成され、第1レベルシフタS2の出力が、テスト信号S0のアサートを示すときにテストモードにセットされ、制御信号S3をアサートする。第2レベルシフタ158は、制御信号S3を、電源電圧V
CC
をハイレベルとするイネーブル信号S4にレベルシフトする。
【選択図】図1
特許請求の範囲
【請求項1】
電源電圧を受ける電源端子と、
定電圧ピンと、
前記定電圧ピンと接続される定電圧ラインと、
イネーブル信号を受けるイネーブル端子を有し、前記イネーブル信号に応じてイネーブル状態とディセーブル状態が切り替え可能であり、前記イネーブル状態において、前記定電圧ラインに定電圧を生成するリニアレギュレータと、
テストピンと、
前記電源電圧を電源として動作するように構成され、前記テストピンに入力されるテスト信号を受けるバッファと、
前記バッファの出力を、前記定電圧をハイレベルとする信号にレベルシフトする第1レベルシフタと、
前記定電圧を電源として動作するように構成され、前記第1レベルシフタの出力が、前記テスト信号のアサートを示すときにテストモードにセットされ、制御信号をアサートするロジック回路と、
前記制御信号を、前記電源電圧をハイレベルとする前記イネーブル信号にレベルシフトする第2レベルシフタと、
を備え、
前記第2レベルシフタのイネーブル端子には、前記バッファの前記出力が入力されている、半導体集積回路。
続きを表示(約 260 文字)
【請求項2】
前記第1レベルシフタのイネーブル端子には、前記定電圧が入力されている、請求項1に記載の半導体集積回路。
【請求項3】
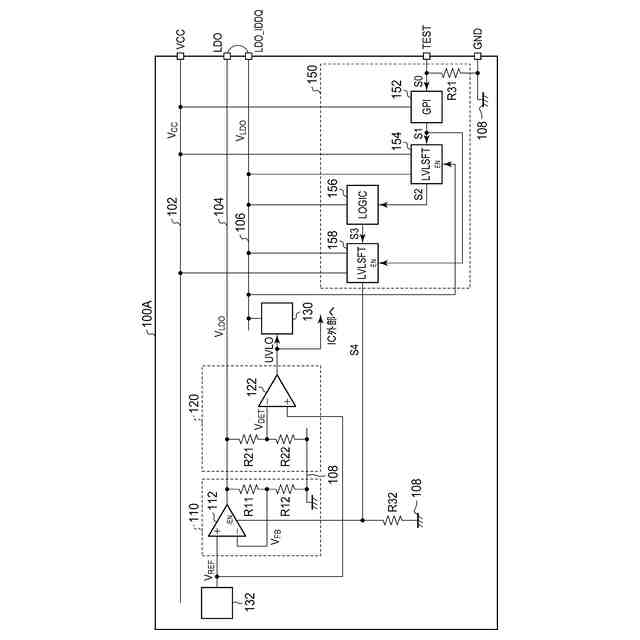
前記定電圧ピンとは別の第2定電圧ピンと、
前記第2定電圧ピンと接続される第2定電圧ラインと、
をさらに備え、
前記定電圧ピンと前記第2定電圧ピンは、後工程においてショートされるものであり、
前記ロジック回路には、前記第2定電圧ピンおよび前記第2定電圧ラインを介して、前記定電圧が供給される、請求項1または2に記載の半導体集積回路。
発明の詳細な説明
【技術分野】
【0001】
本開示は、半導体集積回路に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
多くの半導体集積回路は、定電圧(内部電源電圧)を生成するリニアレギュレータを内蔵する。このような半導体集積回路では、リニアレギュレータによって、所定の電圧レベルに安定化された内部電源電圧を発生し、内部電源電圧を電源として、内部回路を動作させる構成をとっている。
【0003】
内部回路が正常に動作するためには、内部電源電圧が、内部回路の最低動作電圧より高くなければならない。このため、半導体集積回路に、リニアレギュレータが生成する定電圧を監視する低電圧ロックアウト(UVLO:Under Voltage Lockout)回路が設けられる。UVLO回路は、内部電源電圧をしきい値電圧と比較し、比較結果を示すUVLO信号を出力する。UVLO信号が、低電圧状態を示すとき、半導体集積回路の内部回路はディセーブル状態(ロックアウト状態)とされる。
【先行技術文献】
【特許文献】
【0004】
特許第6796454号公報
【0005】
[概要]
本開示は係る状況においてなされたものであり、そのある態様の例示的な目的のひとつは、リニアレギュレータの出力電圧を監視するUVLO回路を試験可能な半導体集積回路の提供にある。
【0006】
本開示のある態様は、半導体集積回路に関する。半導体集積回路は、電源電圧を受ける電源端子と、定電圧ピンと、定電圧ピンと接続される定電圧ラインと、イネーブル信号を受けるイネーブル端子を有し、イネーブル信号に応じてイネーブル状態とディセーブル状態が切り替え可能であり、イネーブル状態において、定電圧ラインに定電圧を生成するリニアレギュレータと、テストピンと、電源電圧を電源として動作するように構成され、テストピンに入力されるテスト信号を受けるバッファと、バッファの出力を、定電圧をハイレベルとする信号にレベルシフトする第1レベルシフタと、定電圧を電源として動作するように構成され、第1レベルシフタの出力が、テスト信号のアサートを示すときにテストモードにセットされ、制御信号をアサートするロジック回路と、制御信号を、電源電圧をハイレベルとするイネーブル信号にレベルシフトする第2レベルシフタと、を備える。第1レベルシフタのイネーブル端子には、定電圧が入力されており、第2レベルシフタのイネーブル端子には、バッファの出力が入力されている。
【0007】
なお、以上の構成要素を任意に組み合わせたもの、構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本発明あるいは本開示の態様として有効である。さらに、この項目(課題を解決するための手段)の記載は、本発明の欠くべからざるすべての特徴を説明するものではなく、したがって、記載されるこれらの特徴のサブコンビネーションも、本発明たり得る。
【図面の簡単な説明】
【0008】
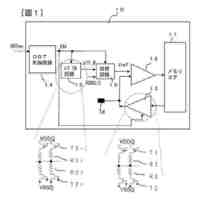
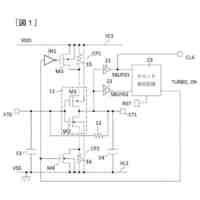
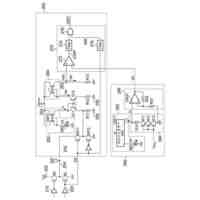
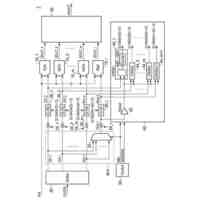
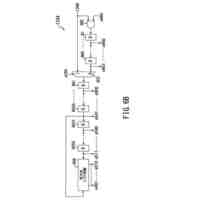
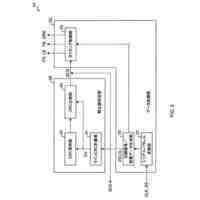
図1は、実施形態に係る半導体集積回路のブロック図である。
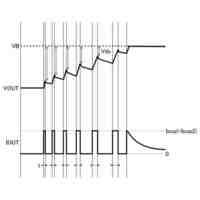
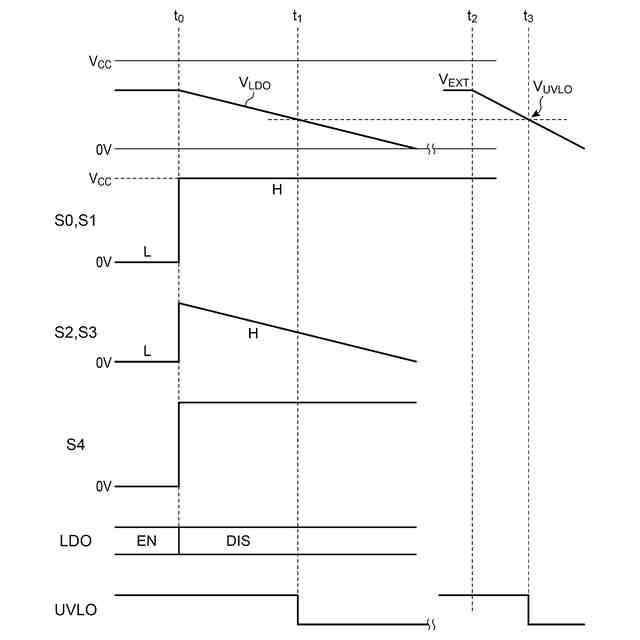
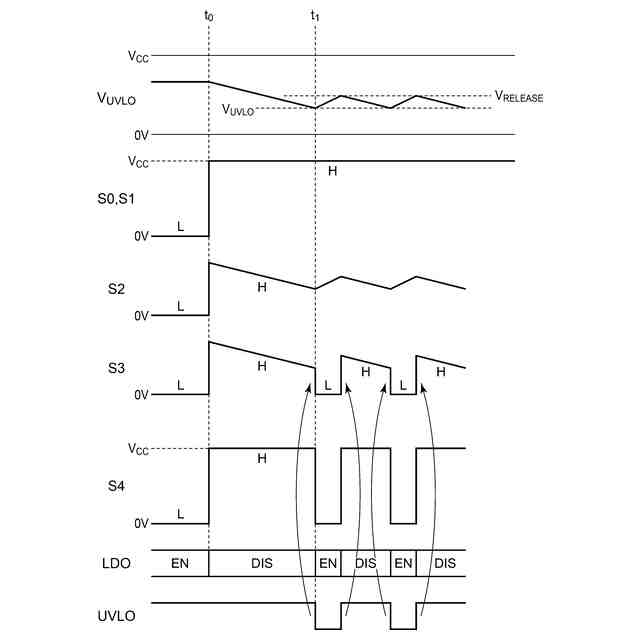
図2は、図1の半導体集積回路の試験工程の動作を説明する図である。
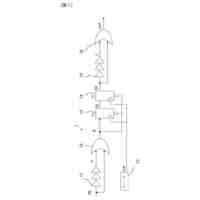
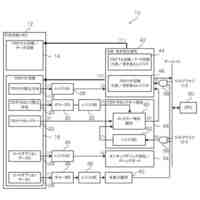
図3は、比較技術に係る半導体集積回路のブロック図である。
図4は、図3の半導体集積回路の動作を説明する図である。
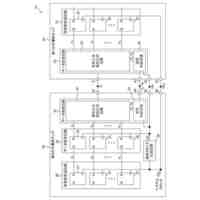
図5は、変形例に係る半導体集積回路のブロック図である。
【0009】
[詳細な説明]
(実施形態の概要)
本開示のいくつかの例示的な実施形態の概要を説明する。この概要は、後述する詳細な説明の前置きとして、実施形態の基本的な理解を目的として、1つまたは複数の実施形態のいくつかの概念を簡略化して説明するものであり、発明あるいは開示の広さを限定するものではない。この概要は、考えられるすべての実施形態の包括的な概要ではなく、すべての実施形態の重要な要素を特定することも、一部またはすべての態様の範囲を線引きすることも意図していない。便宜上、「一実施形態」は、本明細書に開示するひとつの実施形態(実施例や変形例)または複数の実施形態(実施例や変形例)を指すものとして用いる場合がある。
【0010】
一実施形態に係る半導体集積回路は、電源電圧を受ける電源端子と、定電圧ピンと、定電圧ピンと接続される定電圧ラインと、イネーブル信号を受けるイネーブル端子を有し、イネーブル信号に応じてイネーブル状態とディセーブル状態が切り替え可能であり、イネーブル状態において、定電圧ラインに定電圧を生成するリニアレギュレータと、テストピンと、電源電圧を電源として動作するように構成され、テストピンに入力されるテスト信号を受けるバッファと、バッファの出力を、定電圧をハイレベルとする信号にレベルシフトする第1レベルシフタと、定電圧を電源として動作するように構成され、第1レベルシフタの出力が、テスト信号のアサートを示すときにテストモードにセットされ、制御信号をアサートするロジック回路と、制御信号を、電源電圧をハイレベルとするイネーブル信号にレベルシフトする第2レベルシフタと、を備える。第1レベルシフタのイネーブル端子には、定電圧が入力されており、第2レベルシフタのイネーブル端子には、バッファの出力が入力されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
6日前
ローム株式会社
チップ部品
10日前
ローム株式会社
チップ部品
10日前
ローム株式会社
チップ部品
10日前
ローム株式会社
チップ部品
10日前
ローム株式会社
半導体装置
12日前
ローム株式会社
半導体装置
3日前
ローム株式会社
半導体装置
19日前
ローム株式会社
半導体装置
25日前
ローム株式会社
半導体装置
3日前
ローム株式会社
電力制御回路
13日前
ローム株式会社
電池監視装置
13日前
ローム株式会社
画像処理回路
3日前
ローム株式会社
電流測定回路
13日前
ローム株式会社
水晶発振回路
13日前
ローム株式会社
表示制御装置
13日前
ローム株式会社
半導体集積回路
今日
ローム株式会社
半導体集積回路
7日前
ローム株式会社
窒化物半導体装置
3日前
ローム株式会社
窒化物半導体装置
7日前
ローム株式会社
グリッジ除去回路
13日前
ローム株式会社
セルバランス回路
13日前
ローム株式会社
窒化物半導体装置
3日前
ローム株式会社
窒化物半導体装置
3日前
ローム株式会社
アンプ及びモータ装置
25日前
ローム株式会社
A/Dコンバータ回路
3日前
ローム株式会社
不揮発性メモリ保護装置
3日前
ローム株式会社
表示ドライバ及び表示装置
13日前
ローム株式会社
半導体装置、電子機器、車両
5日前
ローム株式会社
表示装置及びソースドライバ
12日前
ローム株式会社
半導体装置、電子機器、車両
11日前
ローム株式会社
半導体装置および半導体装置の製造方法
4日前
ローム株式会社
半導体装置および半導体装置の製造方法
4日前
ローム株式会社
半導体装置および半導体装置の製造方法
4日前
ローム株式会社
半導体光装置及びその製造方法並びにセンサ
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ