TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062493
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171614
出願日
2023-10-02
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250407BHJP(制御;調整)
要約
【課題】作業中における適切な検知範囲を設定することで安全かつ効率的な作業ができる作業車両を提供すること。
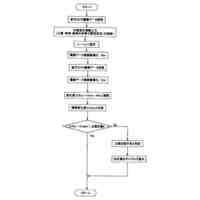
【解決手段】実施形態の一態様に係る作業車両は、走行車体と、前方障害物センサと、後方障害物センサと、制御部と、を備える。前方障害物センサは、走行車体の前方の障害物を検知する。後方障害物センサは、走行車体の後方の障害物を検知する。制御部は、前方障害物センサ又は後方障害物センサが障害物を検知すると走行車体の走行を停止させる。また、制御部は、走行車体が前進中である場合に、前方障害物センサを有効化するとともに後方障害物センサを無効化し、走行車体が後進中である場合に、前方障害物センサを無効化するとともに後方障害物センサを有効化する。
【選択図】図5
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体の前方の障害物を検知する前方障害物センサと、
前記走行車体の後方の障害物を検知する後方障害物センサと、
前記前方障害物センサ又は前記後方障害物センサが障害物を検知すると前記走行車体の走行を停止させる制御部と、を備え、
前記制御部は、
前記走行車体が前進中である場合に、前記前方障害物センサを有効化するとともに前記後方障害物センサを無効化し、
前記走行車体が後進中である場合に、前記前方障害物センサを無効化するとともに前記後方障害物センサを有効化する作業車両。
続きを表示(約 340 文字)
【請求項2】
前記制御部は、
前記走行車体が走行中であり前記前方障害物センサ又は前記後方障害物センサが障害物を検知した場合に、報知部による報知を行うとともに、前記走行車体の走行を停止させ、
前記走行車体が停止中であり前記前方障害物センサ又は前記後方障害物センサが障害物を検知した場合に、前記報知部による報知を行わず、
前記走行車体が前方へ発進する際に、前記前方障害物センサが障害物を検知している場合に、前記報知部による報知を行うとともに、前記走行車体の発進を制限し、
前記走行車体が後方へ発進する際に、前記後方障害物センサが障害物を検知している場合に、前記報知部による報知を行うとともに、前記走行車体の発進を制限する請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、自動運転時に障害物センサが障害物を検知すると車両を停止させる作業車両において、作業エリアを設定し、作業エリア内における障害物センサの感度を高く、作業エリア外における障害物センサの感度を低く設定する作業車両が公知である(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6266407号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の従来技術において、作業エリア外に電柱などの認識しうる障害物がある場合であっても、障害物センサの感度を低く設定することで、不必要な検知による作業車両の停止を抑制できる。しかしながら、作業中においては作業エリア内である場合でも、検知が必要な場所と不必要な場所が刻々と変化するが、そのような変化に応じて適切な検知範囲が設定されていない場合があった。そこで、作業中における適切な検知範囲を設定することで安全かつ効率的な作業ができる作業車両が求められていた。
【0005】
本発明は、上記に鑑みてなされたものであって、作業中における適切な検知範囲を設定することで安全かつ効率的な作業ができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
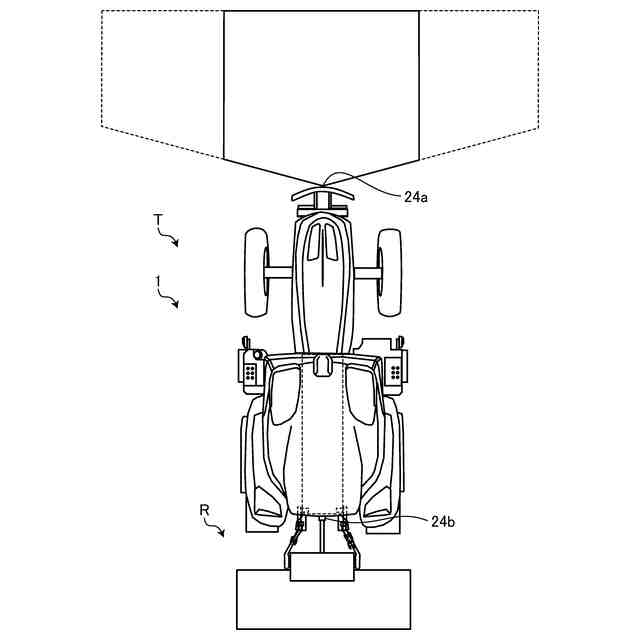
上述した課題を解決し、目的を達成するために、実施形態に係る作業車両は、走行車体(1)と、前記走行車体(1)の前方の障害物(W)を検知する前方障害物センサ(24a)と、前記走行車体(1)の後方の障害物を検知する後方障害物センサ(24b)と、前記前方障害物センサ(24a)又は前記後方障害物センサ(24b)が障害物(W)を検知すると前記走行車体(1)の走行を停止させる制御部(100)と、を備え、前記制御部(100)は、前記走行車体(1)が前進中である場合に、前記前方障害物センサ(24a)を有効化するとともに前記後方障害物センサ(24b)を無効化し、前記走行車体(1)が後進中である場合に、前記前方障害物センサ(24a)を無効化するとともに前記後方障害物センサ(24b)を有効化する。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、作業中における適切な検知範囲を設定することで安全かつ効率的な作業ができる。
【図面の簡単な説明】
【0008】
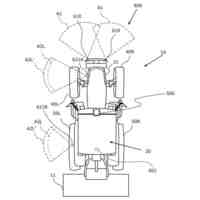
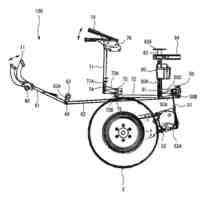
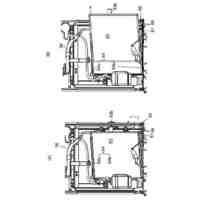
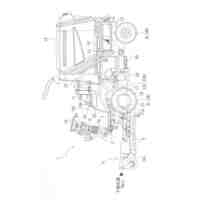
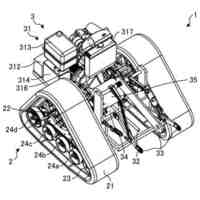
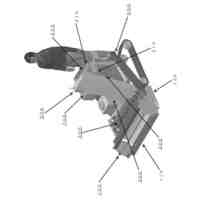
図1は、実施形態に係る作業車両の概略左側面図である。
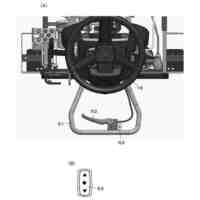
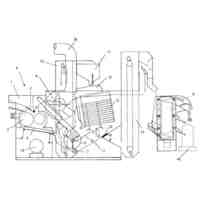
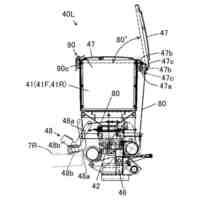
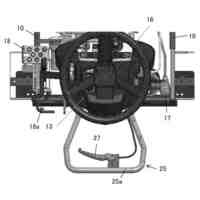
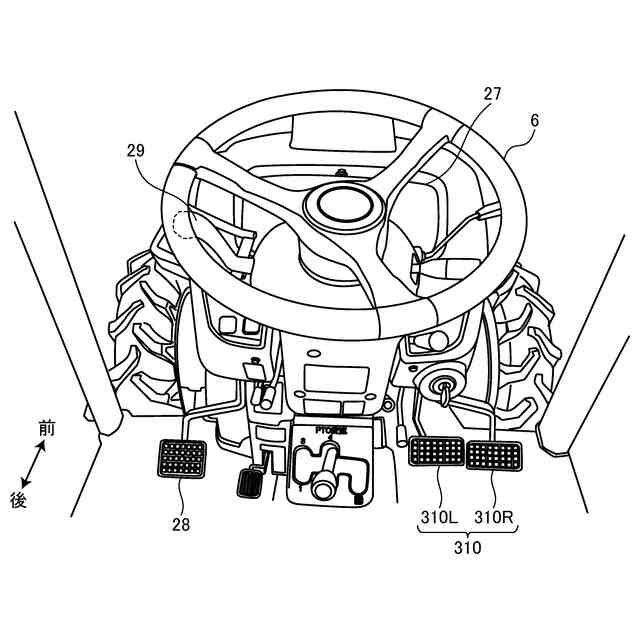
図2は、実施形態に係る作業車両の操縦席前方の略斜視図である。
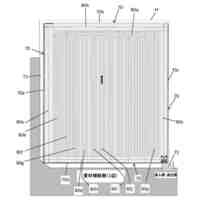
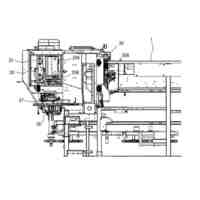
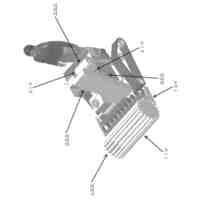
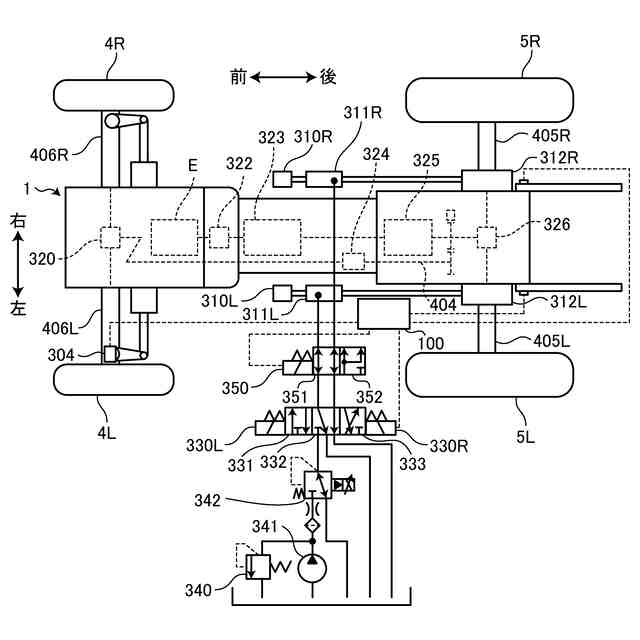
図3は、トラクタの走行車体の説明図である。
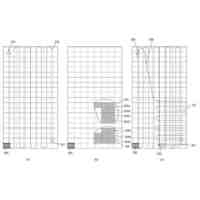
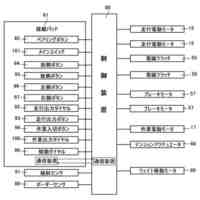
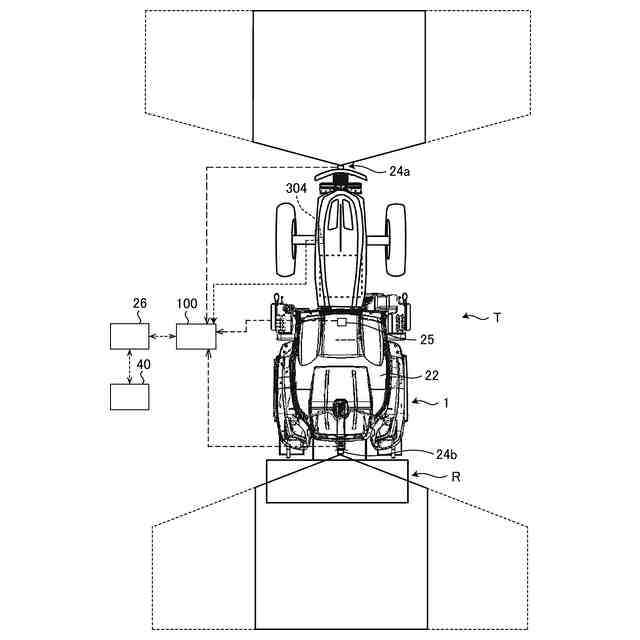
図4は、トラクタの制御構成及び障害物の検知範囲を示す概略平面図である。
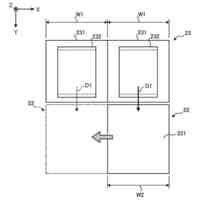
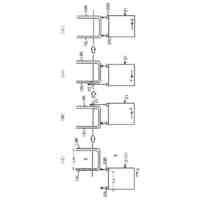
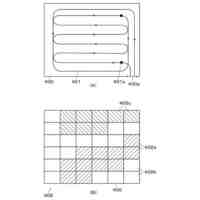
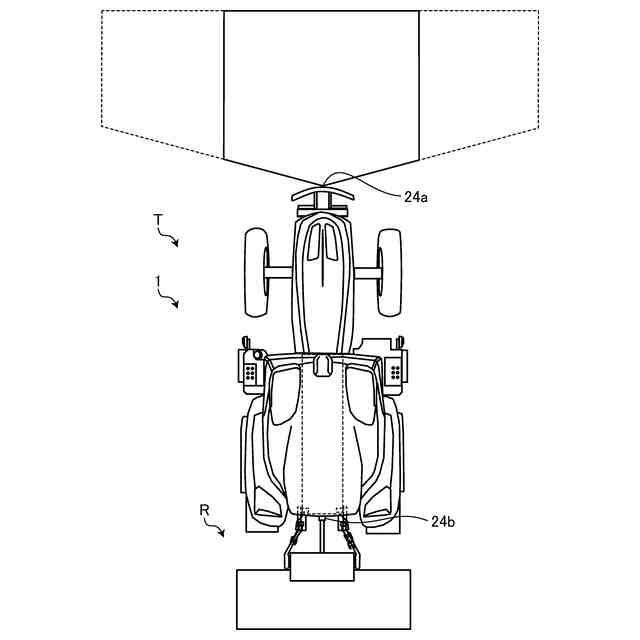
図5は、前進中のトラクタ及び障害物の検知範囲を示す概略平面図である。
図6は、後進中のトラクタ及び障害物の検知範囲を示す概略平面図である。
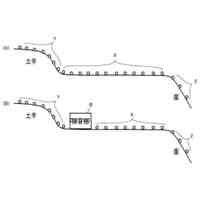
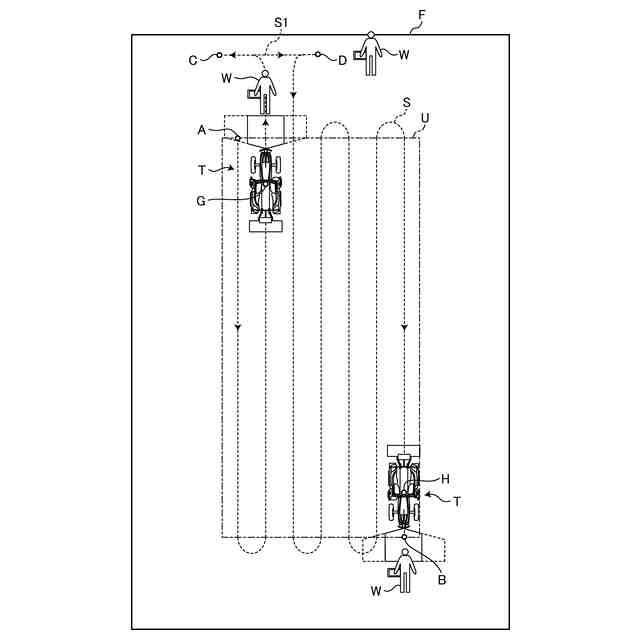
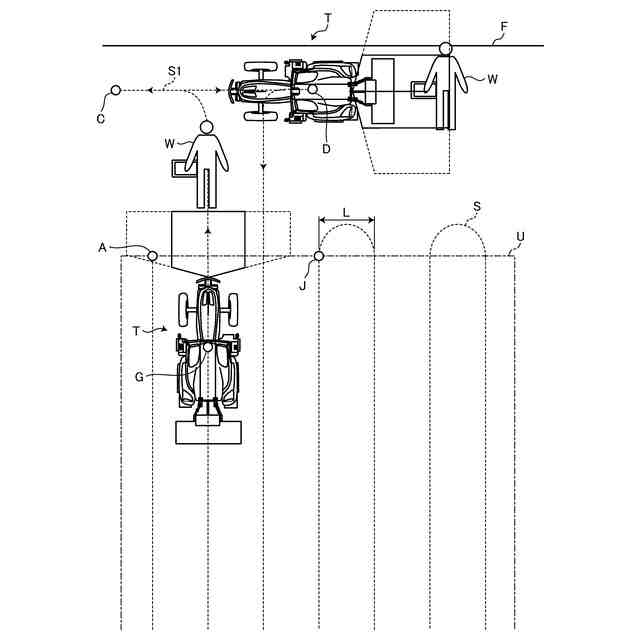
図7は、圃場内で自動走行するトラクタの障害物の検知を説明する説明図である。
図8は、圃場内で自動走行するトラクタの障害物の検知を説明する説明図である。
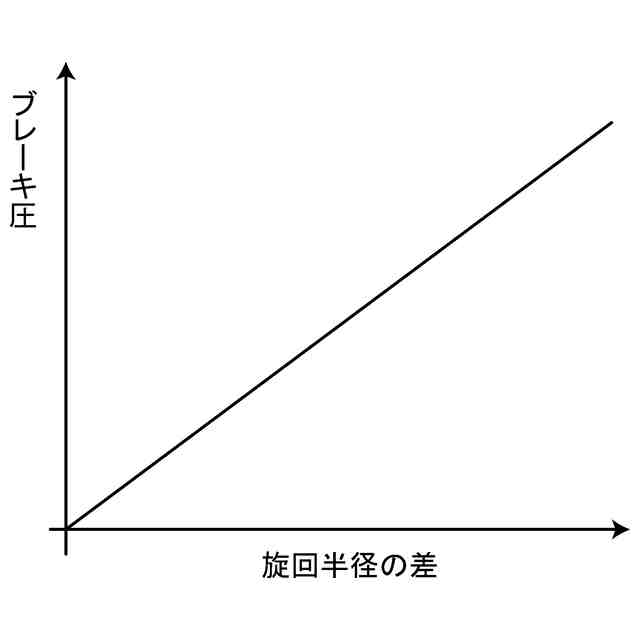
図9は、旋回半径の差とブレーキ圧の関係を説明する説明図である。
図10は、旋回半径の差とブレーキ圧の関係を説明する説明図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
まず、図1~図3を参照して実施形態に係る作業車両の全体構成について説明する。図1は、実施形態に係る作業車両の概略左側面図である。図2は、実施形態に係る作業車両の操縦席前方の略斜視図である。なお、以下では、作業車両としてトラクタTを例に説明する。また、作業車両であるトラクタTは、自走しながら圃場で農作業を行う農業用トラクタである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
25日前
井関農機株式会社
移植機
12日前
井関農機株式会社
作業車両
27日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
精米設備
14日前
井関農機株式会社
苗移植機
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
調製設備
19日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
乗用草刈機
18日前
井関農機株式会社
籾摺選別機
19日前
井関農機株式会社
コンバイン
21日前
井関農機株式会社
コンバイン
18日前
井関農機株式会社
乗用草刈機
18日前
井関農機株式会社
施肥作業機
13日前
井関農機株式会社
コンバイン
14日前
井関農機株式会社
圃場作業機
14日前
井関農機株式会社
コンバイン
13日前
井関農機株式会社
圃場管理装置
26日前
井関農機株式会社
歩行型管理機
12日前
井関農機株式会社
乗用型田植機
14日前
井関農機株式会社
多目的作業車両
12日前
井関農機株式会社
栗収穫作業車両
20日前
井関農機株式会社
栗の実回収作業車両
20日前
井関農機株式会社
水田引水管理システム
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ