TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103284
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220579
出願日
2023-12-27
発明の名称
多目的作業車両
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
59/042 20060101AFI20250702BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
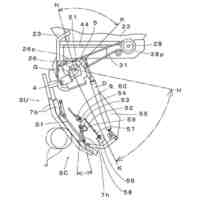
【課題】作業機を取り付けた状態でより安定した走行を実現できる多目的作業車両を提供すること。
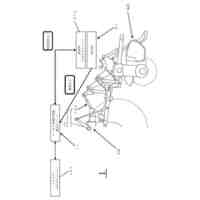
【解決手段】実施形態に係る多目的作業車両は、クローラ構造であって、側面視において頂点の位置に配置された駆動輪と、駆動輪に対して進行方向の一方側に配置される移動可能な第1従動輪と、駆動輪に対して進行方向の他方側に配置される移動不可な第2従動輪とを有する走行装置と、駆動輪に対して第2従動輪側に配置され、エンジンおよびモータを有する駆動源とバッテリとが固定される動力装置と、駆動輪に対して第1従動輪側に配置される作業機とを備える。第1従動輪は、第2従動輪との間の距離が変化する方向に移動する。
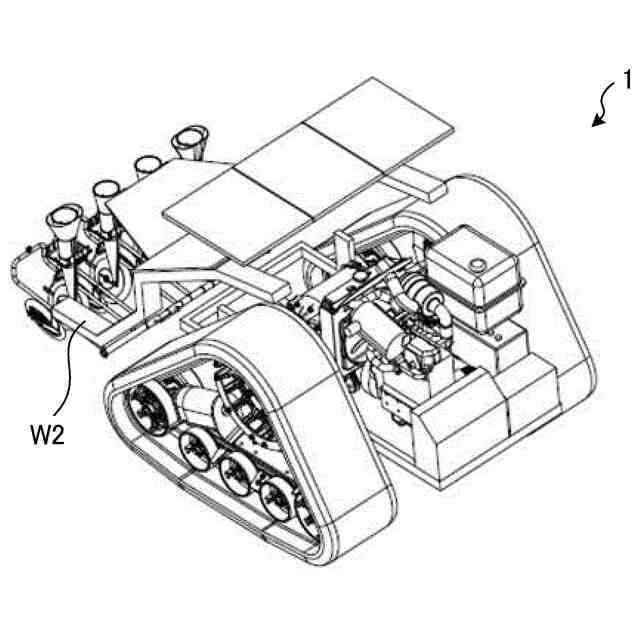
【選択図】図1
特許請求の範囲
【請求項1】
クローラ構造であって、側面視において頂点の位置に配置された駆動輪と、前記駆動輪に対して進行方向の一方側に配置される移動可能な第1従動輪と、前記駆動輪に対して進行方向の他方側に配置される移動不可な第2従動輪とを有する走行装置と、
前記駆動輪に対して前記第2従動輪側に配置され、エンジンおよびモータを有する駆動源とバッテリとが固定される動力装置と、
前記駆動輪に対して前記第1従動輪側に配置される作業機と、
を備え、
前記第1従動輪は、
前記第2従動輪との間の距離が変化する方向に移動する
多目的作業車両。
続きを表示(約 660 文字)
【請求項2】
前記走行装置は、
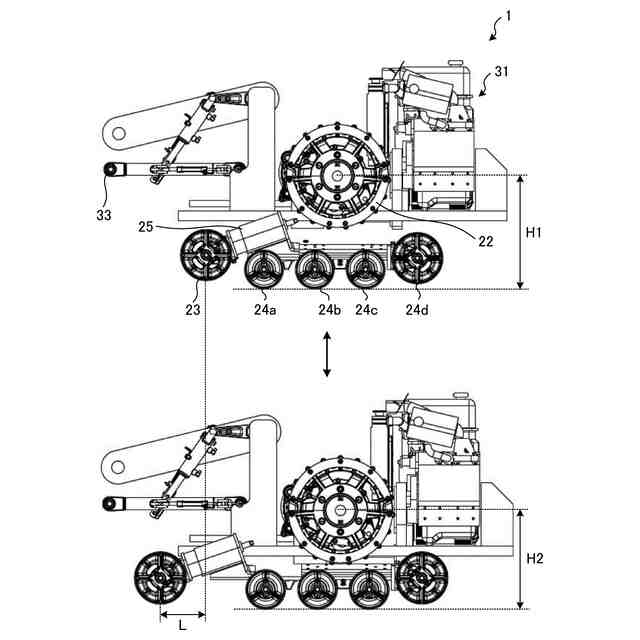
直進時には、前記第2従動輪との間の距離が長くなる方向に前記第1従動輪を移動させ、旋回時には、前記第2従動輪との間の距離が短くなる方向に前記第1従動輪を移動させる
請求項1に記載の多目的作業車両。
【請求項3】
前記作業機は、
耕運機または牽引物であり、前記進行方向において前記動力装置とは反対側に配置され、
前記走行装置は、
前記動力装置が配置された側を前側とし、前記第2従動輪を前方側とする方向に走行する
請求項1に記載の多目的作業車両。
【請求項4】
前記作業機は、
前記進行方向において前記動力装置とは反対側に設けられた刈取部を有する収穫機であり、
前記走行装置は、
前記動力装置が配置された側を後側とし、前記第1従動輪を前方側とする方向に走行する
請求項1に記載の多目的作業車両。
【請求項5】
前記作業機を駆動させるPTO軸をさらに備え、
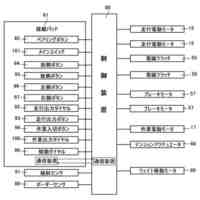
前記エンジン、前記モータおよびPTO軸は、それぞれの動力伝達部が同一平面上に位置する
請求項1に記載の多目的作業車両。
【請求項6】
前記PTO軸が前記作業機に連結されていない場合、前記エンジンの出力を前記PTO軸が前記作業機に連結された場合と同じ出力で維持し、前記エンジンの動力により前記モータを回転させて回生電力を発生させる
請求項5に記載の多目的作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、多目的作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
クローラ構造の走行部を有し、回動自在に設けられた支柱部の先端に作業台を有する昇降ブームの基部及び走行車体上部を覆う運搬作業台が、一体に旋回自在に取り付けられてなることを特徴とする多目的管理作業車がある。(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平10-23822号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、車両にどのような作業機が取り付けられたとしても、より安定した走行を実現する上で改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、作業機を取り付けた状態でより安定した走行を実現できる多目的作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
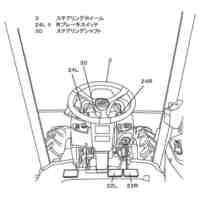
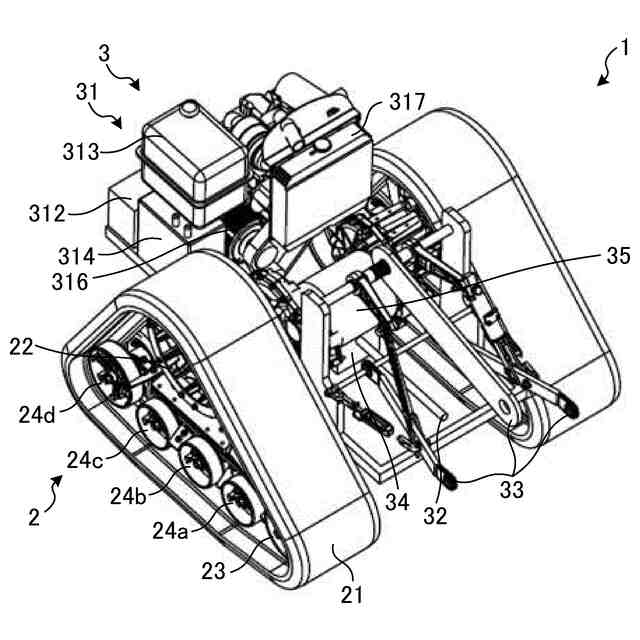
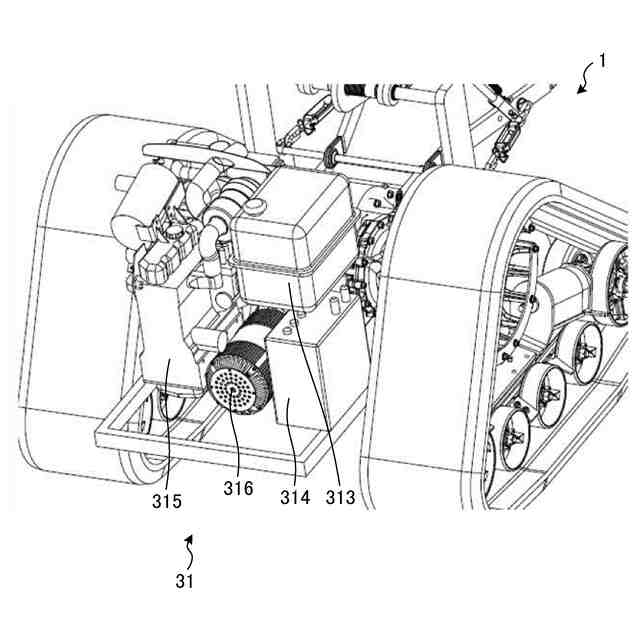
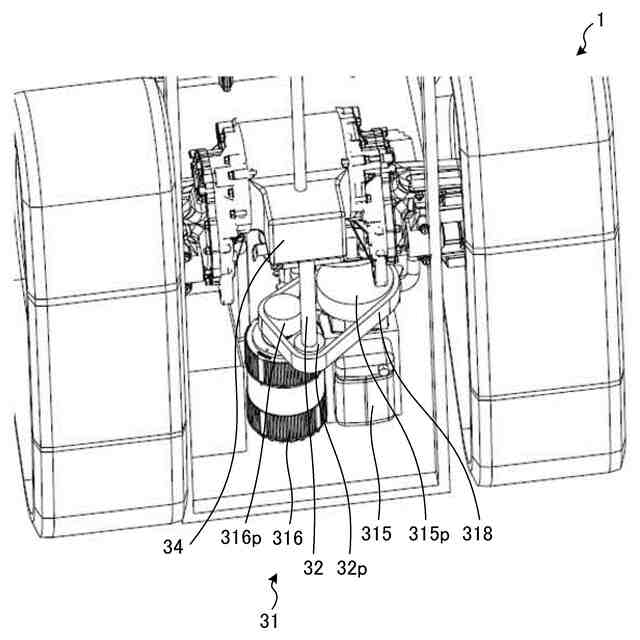
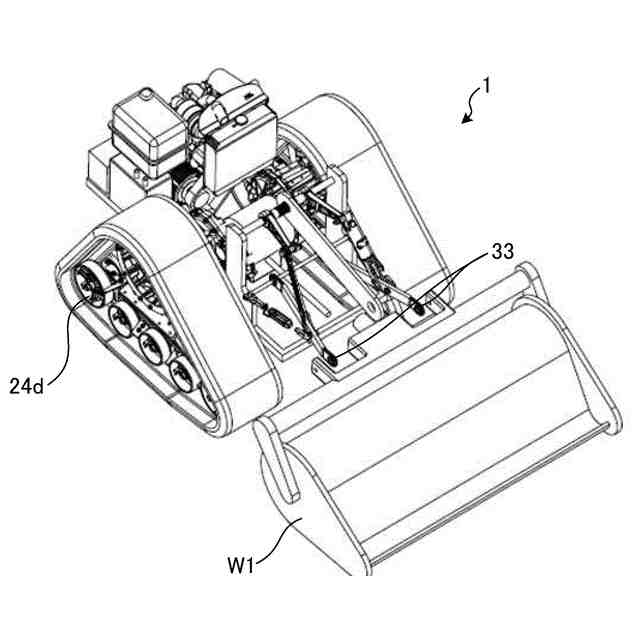
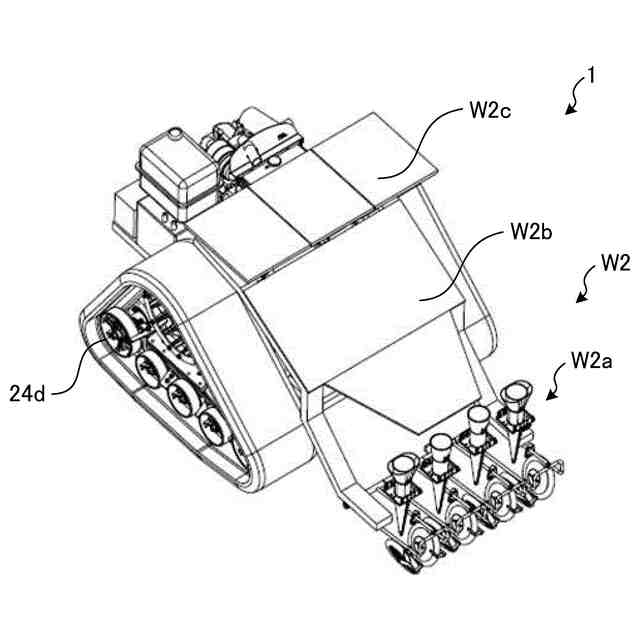
上述した課題を解決し、目的を達成するために、実施形態に係る多目的作業車両(1)は、クローラ構造であって、側面視において頂点の位置に配置された駆動輪(22)と、前記駆動輪(22)に対して進行方向の一方側に配置される移動可能な第1従動輪(23)と、前記駆動輪(22)に対して進行方向の他方側に配置される移動不可な第2従動輪(24d)とを有する走行装置(2)と、前記駆動輪(22)に対して前記第2従動輪(24d)側に配置され、エンジン(315)およびモータ(316)を有する駆動源とバッテリ(314)とが固定される動力装置(31)と、前記駆動輪(22)に対して前記第1従動輪(23)側に配置される作業機(W)とを備える。前記第1従動輪(23)は、前記第2従動輪(24d)との間の距離が変化する方向に移動する。
【発明の効果】
【0007】
実施形態に係る作業車両によれば、作業機を取り付けた状態でより安定した走行を実現できる。
【図面の簡単な説明】
【0008】
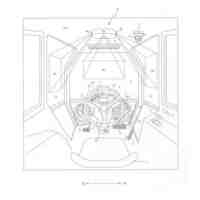
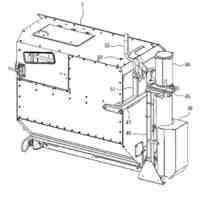
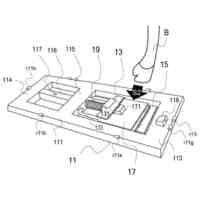
図1は、実施形態に係る多目的作業車両の斜視図である。
図2は、実施形態に係る多目的作業車両の斜視図である。
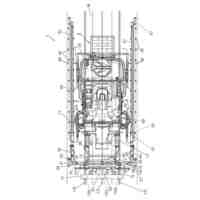
図3は、実施形態に係る多目的作業車両の側面図である。
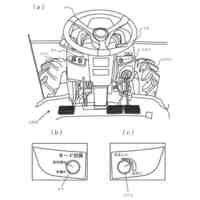
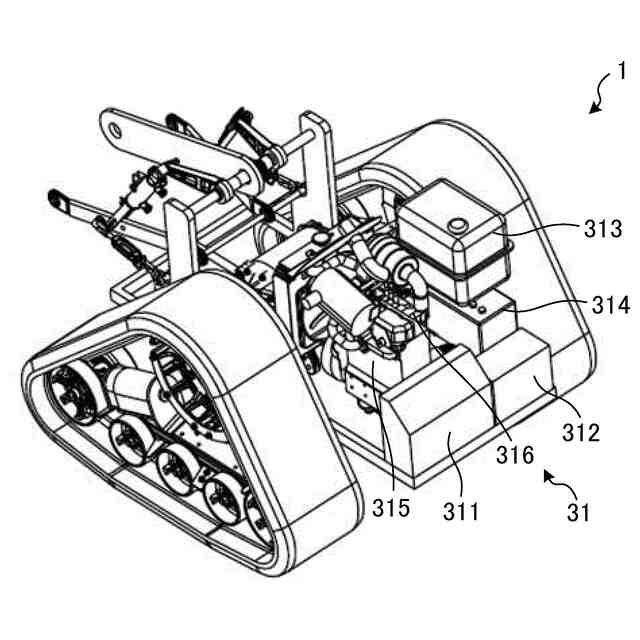
図4は、実施形態に係る多目的作業車両の斜視図である。
図5は、実施形態に係る多目的作業車両の斜視図である。
図6は、作業機である耕運機を装着した例を示す図である。
図7は、作業機である耕運機を装着した例を示す図である。
図8は、作業機である移植機を装着した例を示す図である。
図9は、作業機である移植機を装着した例を示す図である。
図10は、作業機である防除機を装着した例を示す図である。
図11は、作業機である防除機を装着した例を示す図である。
図12は、作業機である土寄せ機を装着した例を示す図である。
図13は、作業機である土寄せ機を装着した例を示す図である。
図14は、作業機である収穫機を装着した例を示す図である。
図15は、作業機である収穫機を装着した例を示す図である。
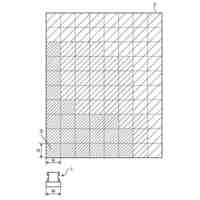
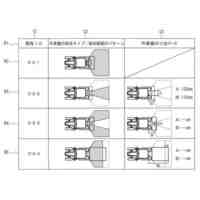
図16は、耕運機が装着された多目的作業車両の第1従動輪の位置を示す図である。
図17は、防除機が装着された多目的作業車両の第1従動輪の位置を示す図である。
図18は、収穫機が装着された多目的作業車両の第1従動輪の位置を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する管理システムの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
まず、図1~図5を参照して実施形態に係る多目的作業車両1の構成について説明する。図1および図2は、実施形態に係る多目的作業車両1の斜視図である。図3は、実施形態に係る多目的作業車両1の側面図である。図4および図5は、実施形態に係る多目的作業車両1の斜視図である。本開示における多目的作業車両1は、圃場等において農作業を行う無人の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
コンバイン
2日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
コンバイン
19日前
井関農機株式会社
収穫作業車両
12日前
井関農機株式会社
作業システム
18日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
苗移植機
16日前
個人
ルアー
26日前
個人
播種装置
23日前
個人
釣り用ルアー
1か月前
個人
釣り用ルアー
1か月前
個人
植物栽培用培地
3日前
個人
虫の生け捕り具
11日前
個人
プランターセット
1か月前
個人
獣捕獲罠装置
1か月前
個人
生命力近親交配方法
1か月前
個人
養殖システム
18日前
岡部株式会社
浮魚礁
11日前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
16日前
株式会社アテックス
草刈機
1か月前
株式会社シマノ
釣竿
19日前
個人
ペット用オムツカバー
1か月前
個人
植物栽培装置
1か月前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
収穫作業車両
12日前
中国電力株式会社
巣撤去具
9日前
個人
漁業支援装置及び方法
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ