TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071577
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181859
出願日
2023-10-23
発明の名称
自律移動体
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250428BHJP(制御;調整)
要約
【課題】載置された物体に作用する、より大きな力を吸収することができる自律移動体を得る。
【解決手段】本実施形態の自律移動体は、駆動輪及び車台を有する走行ユニットと、天板、前記天板を前後方向及び左右方向に振子運動させる振子機構、及び、上下方向の軸まわりに前記振子機構を回転させる回転機構、を有し、前記走行ユニットの上部に配置された、運搬ユニットと、前記自律移動体の加速度を算出し、算出された加速度が閾値を超える場合に前記運搬ユニットの前後方向及び左右方向が前記走行ユニットの前後方向に対して斜めになるよう前記回転機構に前記振子機構を回転させる制御を行う、制御部と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
自律移動体であって、
駆動輪及び車台を有する走行ユニットと、
天板、前記天板を前後方向及び左右方向に振子運動させる振子機構、及び、上下方向の軸まわりに前記振子機構を回転させる回転機構、を有し、前記走行ユニットの上部に配置された、運搬ユニットと、
前記自律移動体の加速度を算出し、算出された加速度が閾値を超える場合に前記運搬ユニットの前後方向及び左右方向が前記走行ユニットの前後方向に対して斜めになるよう前記回転機構に前記振子機構を回転させる制御を行う、制御部と、
を備える自律移動体。
続きを表示(約 490 文字)
【請求項2】
前記制御部は、前記天板の上面に載置された物体に作用する力の方向を、前記上面に垂直な方向に近づけるよう、前記振子機構に前記天板を振子運動させる制御を行い、
前記閾値は、前記振子機構が前記天板を前記運搬ユニットの前後方向及び左右方向のうち少なくとも一方に最大限に振子運動させた場合に、前記物体に作用する力の方向が前記上面に垂直になる、前記自律移動体の加速度である、
請求項1に記載の自律移動体。
【請求項3】
前記制御部は、算出された前記自律移動体の加速度が前記閾値を超える場合に前記運搬ユニットの前後方向及び左右方向が前記走行ユニットの進行方向に対して斜めになるよう前記回転機構に前記振子機構を回転させる制御を行う、
請求項1に記載の自律移動体。
【請求項4】
前記制御部は、算出された前記自律移動体の加速度が前記閾値を超える場合に前記運搬ユニットの正面の中心が前記走行ユニットの正面の中心に対して前記軸まわりにずれるよう前記回転機構に前記振子機構を回転させる制御を行う、
請求項1に記載の自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来から、飲食物や荷物などの物体を運搬可能な自律走行ロボットの研究、開発が行われている。自律走行ロボットは、物体が載置された部分を振子運動させることで、例えば、加減速時、又は傾斜面の走行中に、物体が落ちてしまうことを防ぐことができる。
【先行技術文献】
【特許文献】
【0003】
特開2023-104439号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の構成では、振子運動の範囲には限度がある。このため、振動、揺れ、及び遠心力のような力が物体に大きく作用する場合、当該力を振子運動によって十分に吸収しきれない可能性がある。
【0005】
そこで、本発明は上記に鑑みてなされたものであり、載置された物体に作用する、より大きな力を吸収することができる自律移動体を提供する。
【課題を解決するための手段】
【0006】
本実施形態の自律移動体は、駆動輪及び車台を有する走行ユニットと、天板、前記天板を前後方向及び左右方向に振子運動させる振子機構、及び、上下方向の軸まわりに前記振子機構を回転させる回転機構、を有し、前記走行ユニットの上部に配置された、運搬ユニットと、前記自律移動体の加速度を算出し、算出された加速度が閾値を超える場合に前記運搬ユニットの前後方向及び左右方向が前記走行ユニットの前後方向に対して斜めになるよう前記回転機構に前記振子機構を回転させる制御を行う、制御部と、を備える。
【発明の効果】
【0007】
本実施形態によれば、載置された物体に作用する、より大きな力を吸収することができる。
【図面の簡単な説明】
【0008】
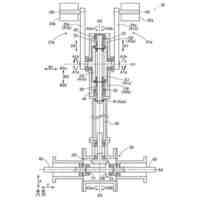
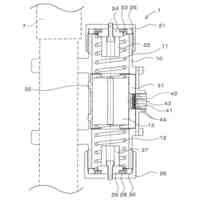
図1は、第1の実施形態の自律走行ロボットの構造を示す図である。
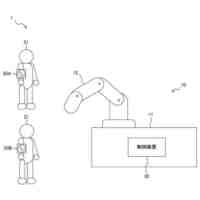
図2は、第1の実施形態の自律走行ロボットの機能構成を示す図である。
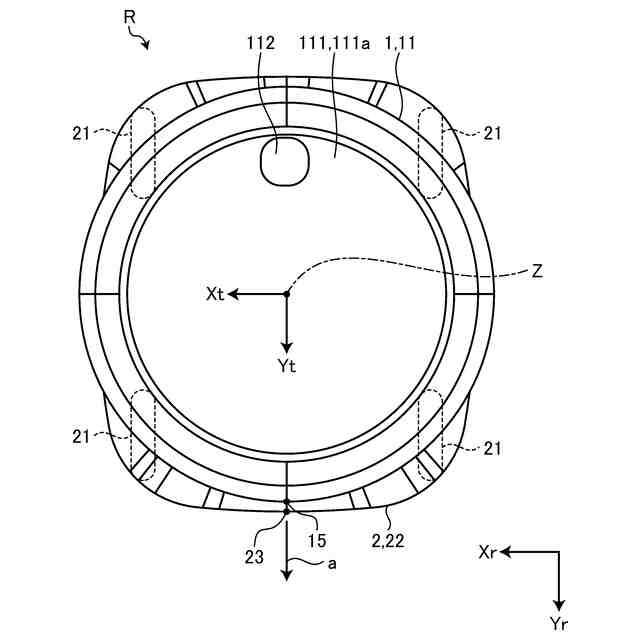
図3は、第1の実施形態の自律走行ロボットの通常状態を示す平面図である。
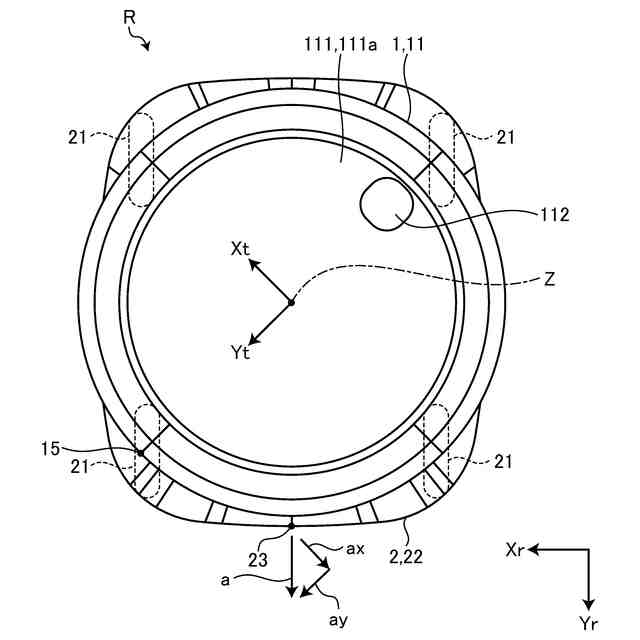
図4は、第1の実施形態の自律走行ロボットの斜め向き状態を示す平面図である。
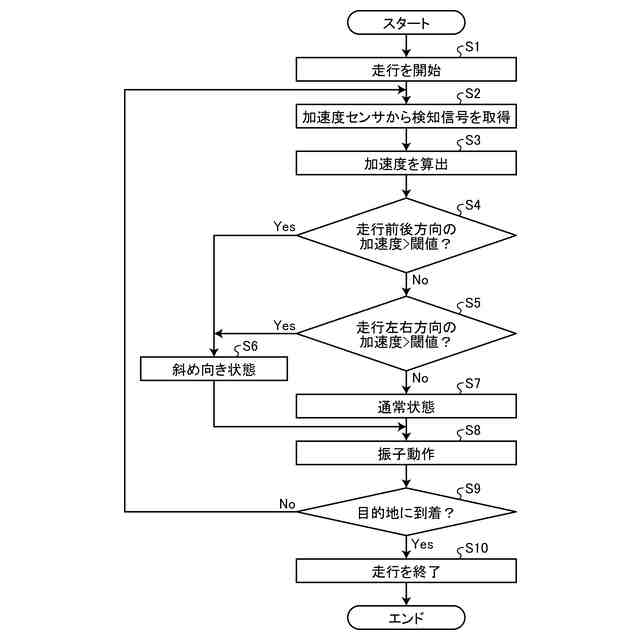
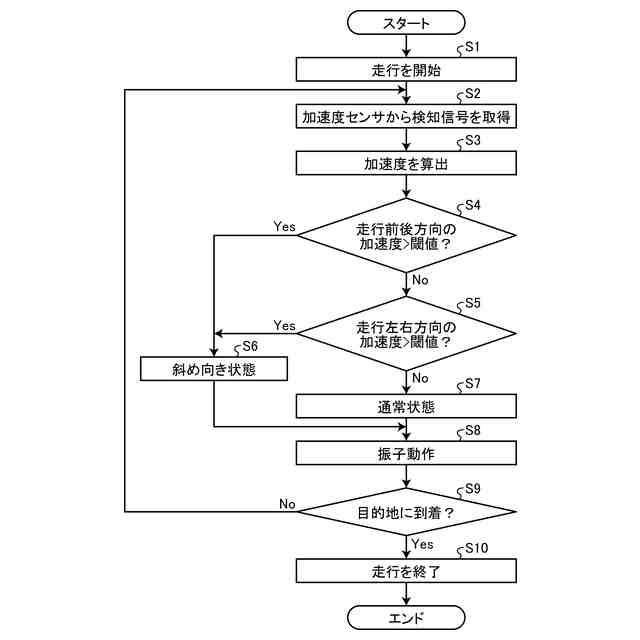
図5は、第1の実施形態の自律走行ロボットの制御部による処理を示すフローチャートである。
図6は、第2の実施形態の自律走行ロボットの斜め向き状態を示す平面図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
以下、図面を参照して、第1の実施形態の自律走行ロボット(自律移動体)について説明する。まず、図1及び図2を参照して、自律走行ロボットRの構造と機能構成について説明する。自律走行ロボットRは、自律移動体の一例である。図1は、第1の実施形態の自律走行ロボットRの構造を示す図である。図2は、第1の実施形態の自律走行ロボットRの機能構成を示す図である。
【0010】
図1(a)は、自律走行ロボットRの外観図である。自律走行ロボットRは、飲食物や荷物などの物体を運搬可能であり、例えば、飲食店、住宅、施設、倉庫、工場、屋外などの移動環境内で自律的に移動する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
温度調節器
4日前
株式会社アイシン
車両制御装置
16日前
株式会社アイシン
動力変換装置
16日前
株式会社アイシン
電子制御装置
17日前
株式会社アイシン
燃焼ガス出力装置
17日前
株式会社アイシン
ダイナミックダンパ
1日前
株式会社アイシン
ペロブスカイト太陽電池
16日前
株式会社豊田中央研究所
制御装置及び制御システム
4日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
8日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
17日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
1日前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
23日前
株式会社タブチ
減圧弁
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社テイエルブイ
減圧弁の制御装置
3日前
三菱電機株式会社
電源回路
17日前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
オムロン株式会社
安全装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
個人
ペダル装置、及びペダル装置を具備する自動車
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ