TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042792
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149934
出願日
2023-09-15
発明の名称
多連レバー機構
出願人
和研工業株式会社
代理人
個人
主分類
G05G
25/00 20060101AFI20250321BHJP(制御;調整)
要約
【課題】全体として幅寸法を小さくすることができ、コストダウンを図ることができる多連レバー機構とする。
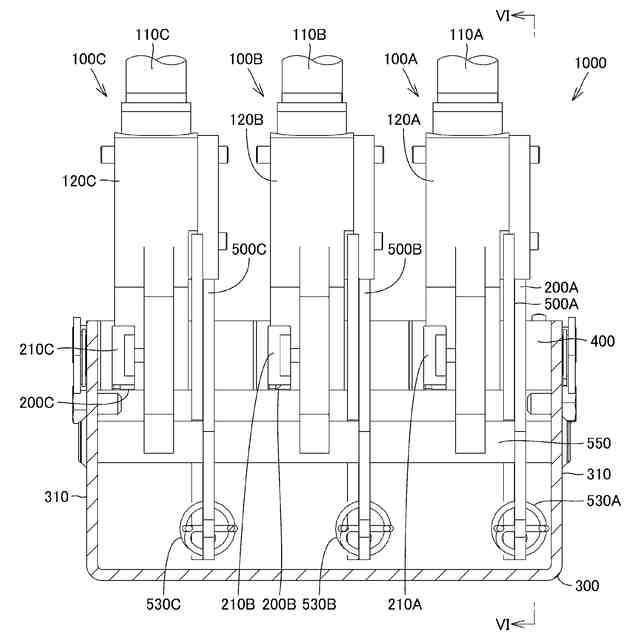
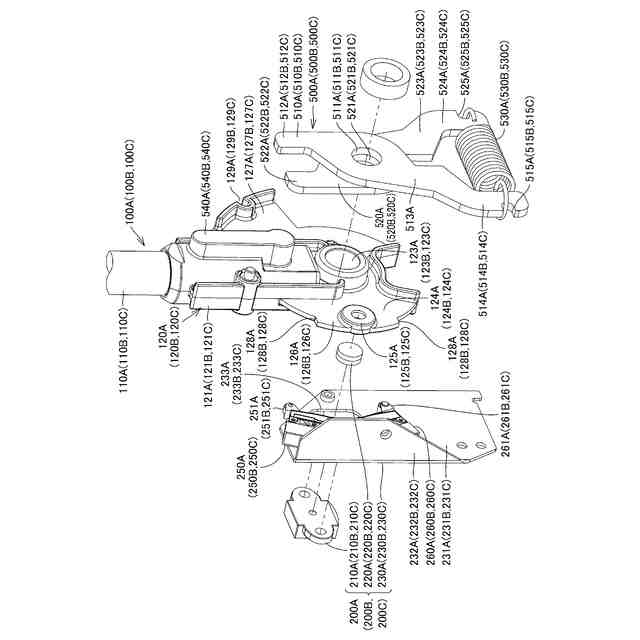
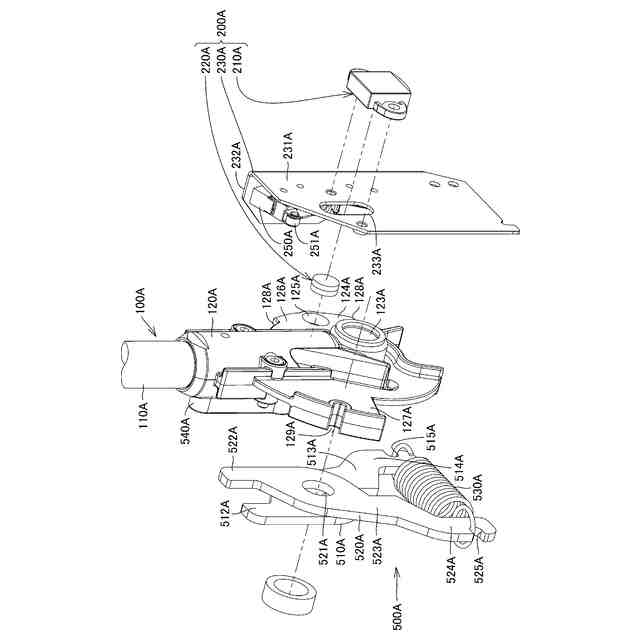
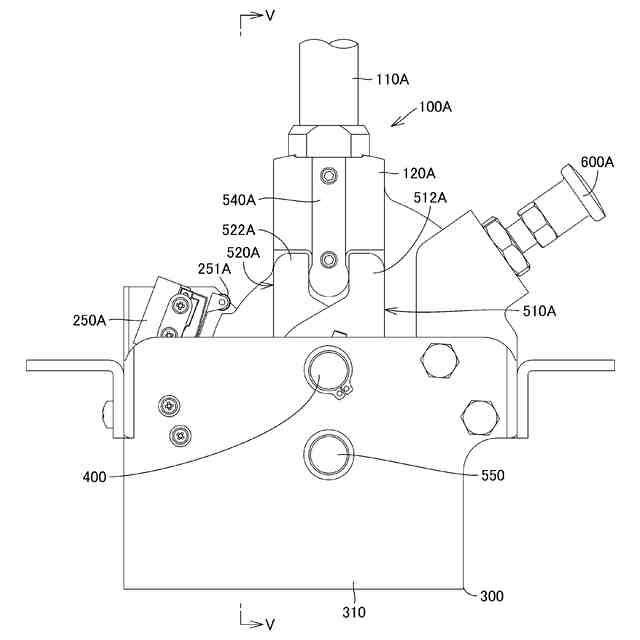
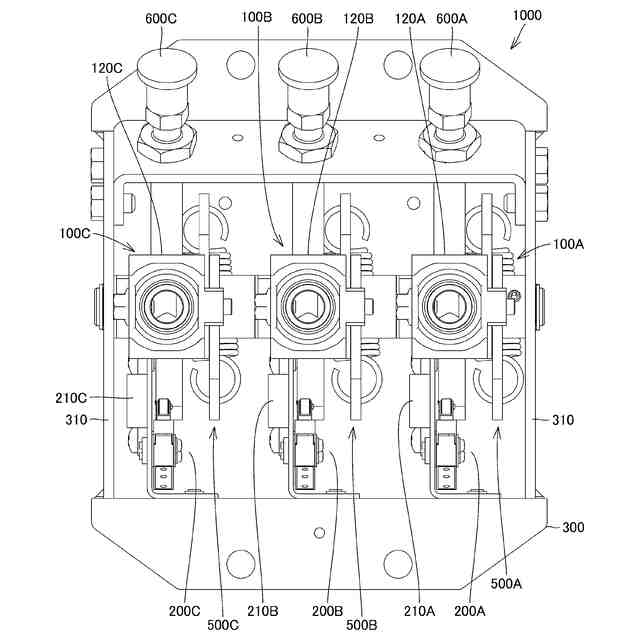
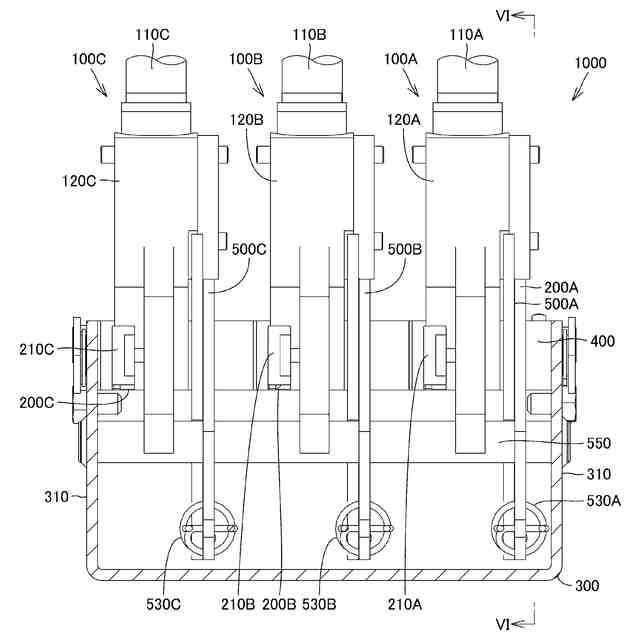
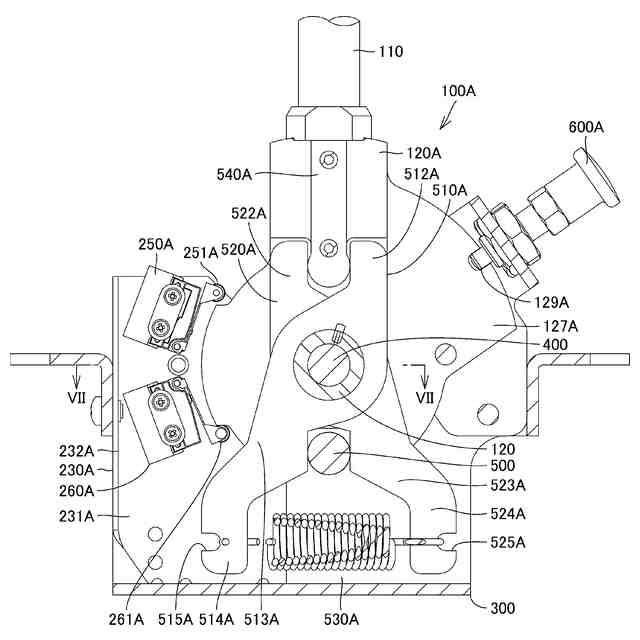
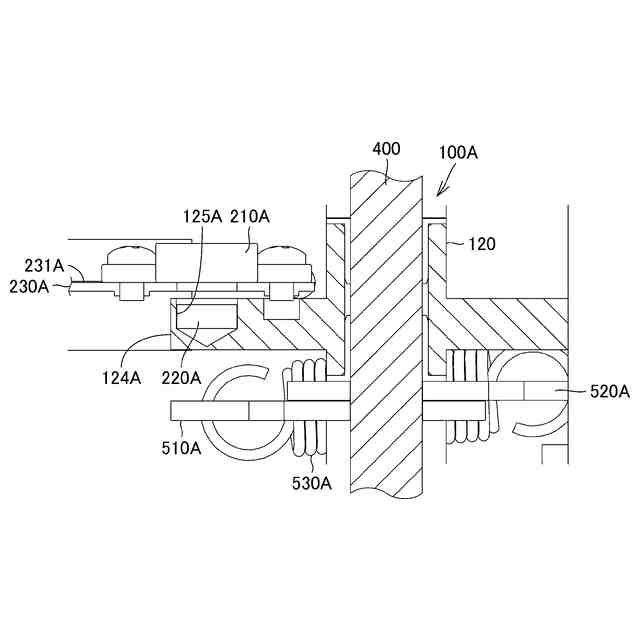
【解決手段】同一の回転軸400に回動可能に支持された操作レバー100A,100B,100Cと、操作レバー100A,100B,100Cの回転角度を検出する回転角度検出部200A,200B,200Cとを備え、回転角度検出部200A,200B,200Cは非接触式センサ210A,210B,210Cと、非接触式センサ210A,210B,210Cによって検出される被検出部とを有し、被検出部は操作レバー100A,100B,100Cの回転に応じて前記回転軸400を中心として周方向に変位し、非接触式センサ210A,210B,210Cは操作レバー100A,100B,100Cの回転に関わらず変位しないようになっている。
【選択図】図5
特許請求の範囲
【請求項1】
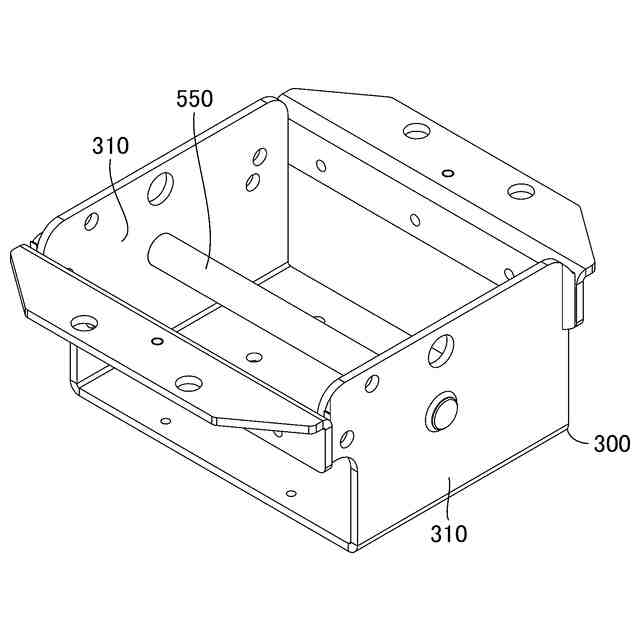
同一の回転軸に回動可能に支持された複数の操作レバーと、これらの操作レバーの回転角度を検出する回転角度検出部と、前記回転軸を支持し、かつ内側に前記複数の操作レバーを納めたフレームとを具備しており、前記回転角度検出部は非接触式センサと、この非接触式センサによって検出される被検出部とを有しており、前記非接触式センサと前記被検出部とは、前記回転軸から離れた位置に設置されており、前記被検出部は操作レバーの回転に応じて前記回転軸を中心として周方向に変位し、非接触式センサは操作レバーの回転に関わらず変位しないことを特徴とする多連レバー機構。
続きを表示(約 670 文字)
【請求項2】
前記非接触式センサは磁気センサで、前記被検出部は高さ方向着磁した磁石であることを特徴とする請求項1記載の多連レバー機構。
【請求項3】
前記非接触式センサは光学センサで、前記被検出部は発光素子であることを特徴とする請求項1に記載の多連レバー機構。
【請求項4】
前記操作レバーの回転方向を検出するために操作レバーの回転方向に応じて反応する2つのスイッチを設けたことを特徴とする請求項1、2又は3記載の多連レバー機構。
【請求項5】
請求項1、請求項2又は請求項3記載の多連レバー機構において、操作レバーを中立位置に復帰させる復帰機構をそれぞれのレバーごとに設けたことを特徴とする多連レバー機構。
【請求項6】
請求項1、請求項2又は請求項3記載の多連レバー機構において、操作レバーと一緒に回転し、回転軸と同軸の円筒部を有するブレーキボスと、前記円筒部を両サイドから挟み込む,一対のブレーキシューとを有するブレーキ機構を有することを特徴とする多連レバー機構。
【請求項7】
請求項1、請求項2又は請求項3記載の多連レバー機構において、操作レバーを中立位置において固定する操作レバー固定機構をそれぞれの操作レバーごとに設けたことを特徴とする多連レバー機構。
【請求項8】
請求項6記載の多連レバー機構において、操作レバーを中立位置において固定する操作レバー固定機構をそれぞれの操作レバーごとに設けたことを特徴とする多連レバー機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えばクレーン等の建築用重機の操作を行うための多連レバー機構に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
建築用重機、例えばクレーンでは、ブームの上下動動作、ブームの旋回動作、ワイヤーの巻き上げ巻き戻し動作等の複数の動作をそれぞれ独立した操作レバーで操作するようになっている。
ブームの上下動動作等を行う操作レバーは、回転軸を中心として前後方向に回転可能になっており、操作レバーの回転角度に応じてブームの上下動の動作量が制御される。
【0003】
この種の操作レバーとしては、特許第6471083号等がある。
【0004】
特許第6471083号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
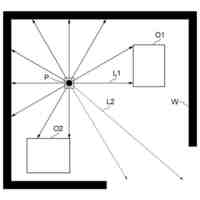
しかしながら、クレーン等の建築用重機ではオペレーターが乗り込むの操作キャビンは前方の視界確保のため、前方には操作用の操作レバーを設置することができず、オペレーターの両サイドに操作用の操作レバーを設置するようになっている。
オペレーターのサイドに設置される複数の操作レバーは、操作性を考慮すると横一列に配置するのが望ましい。
【0006】
この種のレバー機構は、フレームに掛け渡された回転軸を中心として回動可能に支持される操作レバーと、この操作レバーの回転角度を検出する角度検出部とを有している。
角度検出部には、回転軸の端部に設置され、回転軸の回転に従って回転する径方向着磁の磁石と、この磁石の位置を検出する非接触式センサとしてのホール素子とが設けられている。
【0007】
しかしながら、従来のレバー機構は、回転軸の端部に磁石が設置され、かつこの磁石と対向するように非接触式センサとしてのホール素子が設置されているため、少なくとも磁石とホール素子とその間に設けられるギャップの寸法だけ幅寸法が大きくなる。
しかも、この従来のレバー機構は1つのフレームに1つの操作レバーが納められているので、横一列に複数を配置すると、フレーム毎の寸法も合わさって全体の幅寸法が大きくなりがちである。
操作キャビンは最小限のスペースしかないため、レバー機構の幅寸法は小さくすることが求められる。
【0008】
本発明は、上記事情に鑑みて創案されたもので、全体として幅寸法を小さくすることができ、しかもコストダウンを図ることができる多連レバー機構を提供することを目的としている。
【課題を解決するための手段】
【0009】
本発明に係る多連レバー機構は、同一の回転軸に回動可能に支持された複数の操作レバーと、これらの操作レバーの回転角度を検出する回転角度検出部と、前記回転軸を支持し、かつ内側に前記複数の操作レバーを納めたフレームとを備えており、前記回転角度検出部は非接触式センサと、この非接触式センサによって検出される被検出部とを有しており、前記非接触式センサと前記被検出部とは、前記回転軸から離れた位置に設置されており、前記被検出部は操作レバーの回転に応じて前記回転軸を中心として周方向に変位し、非接触式センサは操作レバーの回転に関わらず変位しないようになっている。
【0010】
また、前記非接触式センサには磁気センサ又は光学センサを、前記被検出部には高さ方向着磁した磁石又は発光素子を使用する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
2か月前
株式会社FUJI
工作機械
今日
株式会社ダイヘン
移動体
5日前
ローム株式会社
半導体集積回路
15日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
今日
三栄ハイテックス株式会社
基準電圧回路
18日前
三菱電機株式会社
自己位置推定装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイヘン
負荷時タップ切換器
5日前
株式会社やまびこ
走行制御装置
2か月前
株式会社ダイフク
物品搬送設備
14日前
株式会社タブチ
減圧弁
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
11日前
WHILL株式会社
電動モビリティ
1か月前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
21日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社デンソー
診断装置
2か月前
株式会社豊田自動織機
無人搬送車両
8日前
株式会社アイシン
自律移動体
1か月前
株式会社大林組
作業機械の自動運転制御システム
14日前
株式会社アイシン
自律移動体
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
15日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社FUJI
工作機械
1日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社東海理化電機製作所
ペダル装置
28日前
株式会社東海理化電機製作所
ペダル装置
28日前
株式会社東海理化電機製作所
ペダル装置
28日前
株式会社ダイヘン
情報処理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ