TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071749
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2024022679
出願日
2024-02-19
発明の名称
自律移動体
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/622 20240101AFI20250428BHJP(制御;調整)
要約
【課題】進行方向を変える場合に人間に近い動きをすることができる自律移動体を提供する。
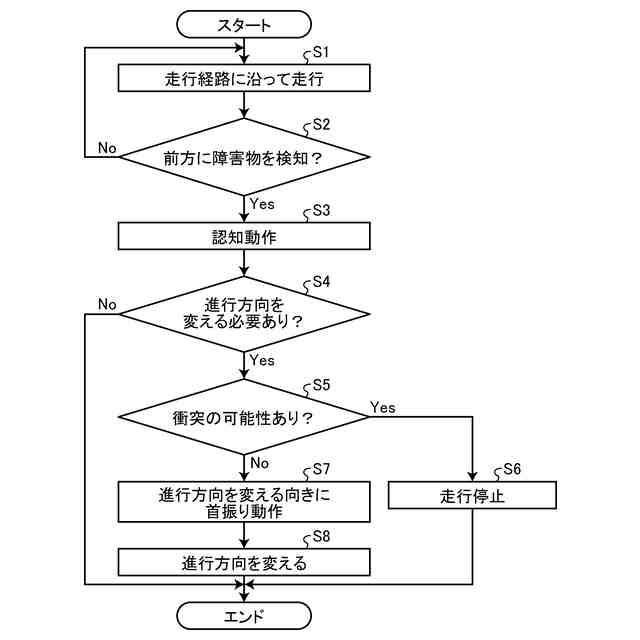
【解決手段】本実施形態の自律移動体は、駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な第1ユニットと、前記第1ユニットの上部に配置され、天板、および、前記第1ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、周囲の障害物を検知する障害物検知部と、を備える自律移動体であって、前記自律移動体の移動中に、前記障害物検知部によって前記自律移動体の進行方向に障害物を検知した場合、前記障害物を避けるために前記第1ユニットを制御して前記自律移動体の進行方向を変える場合に、進行方向を変えるよりも前に前記第2ユニットに首振り動作させる制御を行う制御部を、備える。
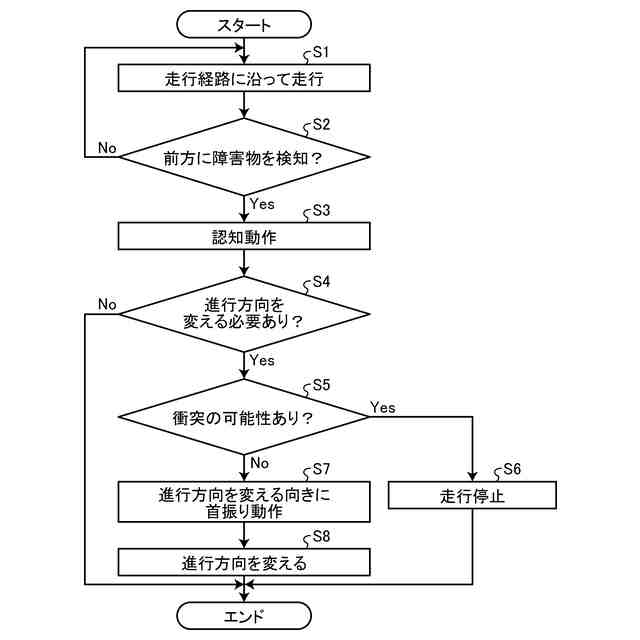
【選択図】図4
特許請求の範囲
【請求項1】
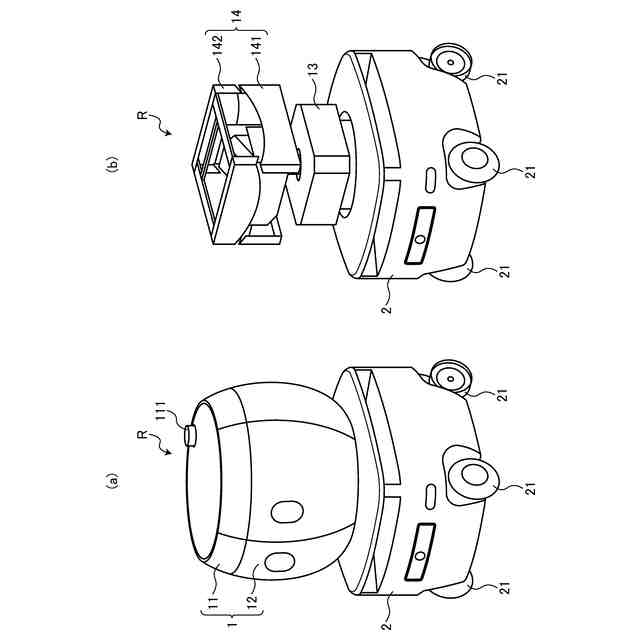
駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な第1ユニットと、
前記第1ユニットの上部に配置され、天板、および、前記第1ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、
周囲の障害物を検知する障害物検知部と、を備える自律移動体であって、
前記自律移動体の移動中に、前記障害物検知部によって前記自律移動体の進行方向に障害物を検知した場合、前記障害物を避けるために前記第1ユニットを制御して前記自律移動体の進行方向を変える場合に、進行方向を変えるよりも前に前記第2ユニットに首振り動作させる制御を行う制御部を、備える自律移動体。
続きを表示(約 800 文字)
【請求項2】
前記制御部は、前記自律移動体の移動中に、前記障害物検知部によって前記自律移動体の進行方向に障害物を検知した場合、前記障害物の予測進行方向と前記障害物までの距離に基づいて前記障害物を避けるための走行経路を算出し、進行方向を変えるよりも前に前記第2ユニットに、進行方向を変える方向と同じ方向に首振り動作させ、その場合に、前記走行経路において前記第1ユニットの進行方向が最も大きく変わる最大角度変化量よりも大きい角度になるように前記第2ユニットの首振り動作の角度を制御する、請求項1に記載の自律移動体。
【請求項3】
前記制御部は、前記第2ユニットに所定の認知動作を行わせる場合に、前記障害物に応じて異なる認知動作を行わせる、請求項1に記載の自律移動体。
【請求項4】
前記制御部は、前記第2ユニットに所定の認知動作を行わせる場合に、前記自律移動体と前記障害物との距離、または、前記自律移動体と前記障害物との相対速度に応じて異なる認知動作を行わせる、請求項1に記載の自律移動体。
【請求項5】
前記制御部は、前記自律移動体の移動中に、前記障害物検知部によって前記自律移動体の進行方向に障害物を検知した場合、前記障害物が前記自律移動体の存在を認識したか否かを判定し、認識したと判定したときに、前記第2ユニットに所定の認知動作を行わせる、請求項1に記載の自律移動体。
【請求項6】
前記制御部は、前記障害物を避けるために前記第1ユニットを制御して前記自律移動体の進行方向を変える場合に、進行方向を変えるよりも前に前記第2ユニットに首振り動作させる制御を行うときに、前記自律移動体が目的地に到着するまで前記第2ユニットが前記目的地の方向を向くように前記第2ユニットの首振り動作の角度を制御する、請求項1に記載の自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、飲食物や荷物などの物体を運搬可能な自律走行ロボットの研究、開発が行われている。自律走行ロボットは、進行方向に障害物となる人がいる場合、例えば、減速もしくは停止し、人の進行方向を予測し、自身の進行方向を人の予測進行方向とは異なる方向へ変え、人と衝突しない距離を保ちながらすれ違う。
【先行技術文献】
【特許文献】
【0003】
特許第5768273号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の自律走行ロボットの動きでは、自律走行ロボットが進行方向を変え始めるまで、人は、自律走行ロボットが進行方向を変える向きを認識できないため対応しにくい、という問題がある。
【0005】
一方、人間の場合、進行方向に他人がいると、その他人を避けるために進行方向を変え始めるよりも前に、顔(目線)の方向を変えることがある。これにより、その他人は、顔(目線)の方向を変えた人を見て、その人が進行方向を変えようとしていることとその変える方向を認識することができる。
【0006】
このように、従来の自律走行ロボットは、進行方向を変える場合に人間らしい動きができていないという点で、改善の余地がある。
【0007】
本発明は、上記事情に鑑みてなされたものであって、進行方向を変える場合に人間に近い動きをすることができる自律移動体を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明の自律移動体は、駆動輪、および、車台を有し、直進移動と左右への旋回移動が可能な第1ユニットと、前記第1ユニットの上部に配置され、天板、および、前記第1ユニットを基準に鉛直方向の軸周りに動く首振り動作を行うための首振り機構を有する第2ユニットと、周囲の障害物を検知する障害物検知部と、を備える自律移動体であって、前記自律移動体の移動中に、前記障害物検知部によって前記自律移動体の進行方向に障害物を検知した場合、前記障害物を避けるために前記第1ユニットを制御して前記自律移動体の進行方向を変える場合に、進行方向を変えるよりも前に前記第2ユニットに首振り動作させる制御を行う制御部を、備える。
【発明の効果】
【0009】
本発明によれば、進行方向を変える場合に人間に近い動きをすることができる自律移動体を提供することができる。
【図面の簡単な説明】
【0010】
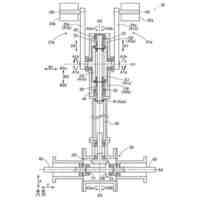
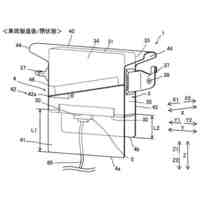
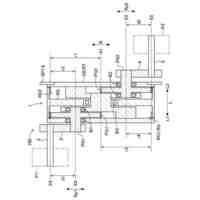
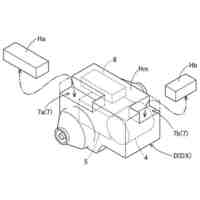
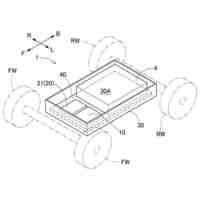
図1は、実施形態の自律走行ロボットの構造を示す図である。
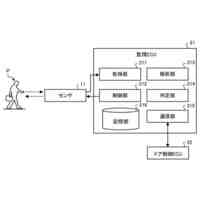
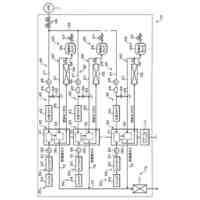
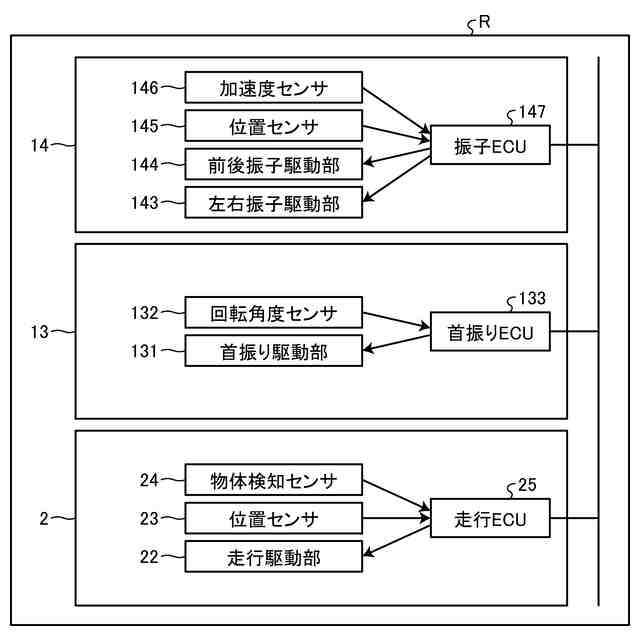
図2は、実施形態の自律走行ロボットの機能構成を示す図である。
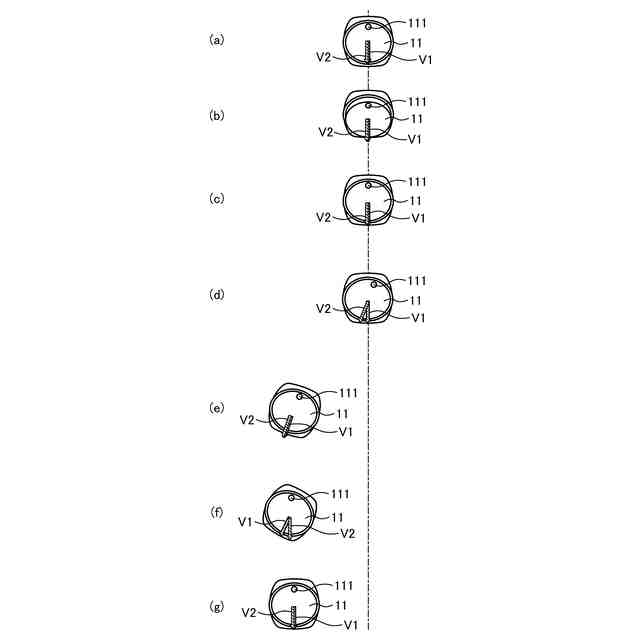
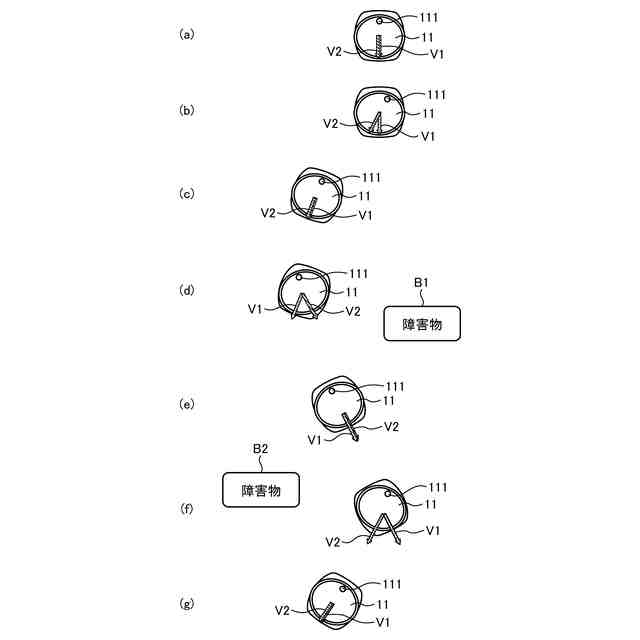
図3は、実施形態の自律走行ロボットの第1の動作例を示す図である。
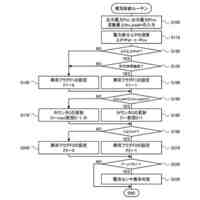
図4は、実施形態の自律走行ロボットによる第1の処理を示すフローチャートである。
図5は、実施形態の自律走行ロボットの第2の動作例を示す図である。
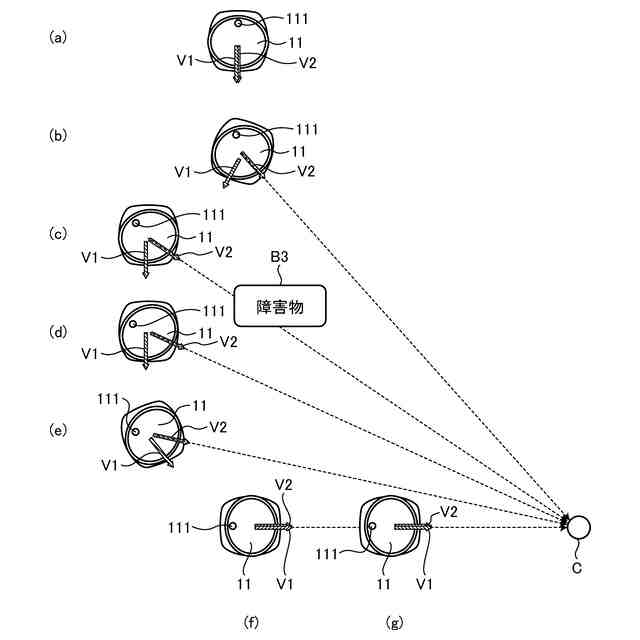
図6は、実施形態の自律走行ロボットの第3の動作例を示す図である。
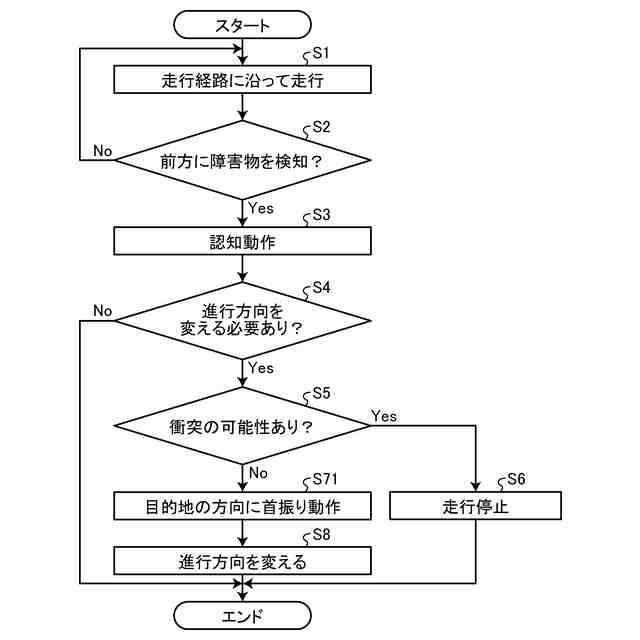
図7は、実施形態の自律走行ロボットによる第2の処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
電子機器
1か月前
株式会社アイシン
MRAM
25日前
株式会社アイシン
流路部材
1か月前
株式会社アイシン
監視装置
1か月前
株式会社アイシン
温度調節器
1か月前
株式会社アイシン
温度調節器
6日前
株式会社アイシン
電力システム
1か月前
株式会社アイシン
車両制御装置
18日前
株式会社アイシン
動力変換装置
18日前
株式会社アイシン
電子制御装置
19日前
株式会社アイシン
動力変換装置
28日前
株式会社アイシン
車両制御装置
1か月前
株式会社アイシン
動力伝達装置
1か月前
株式会社アイシン
車体下部構造
20日前
株式会社アイシン
電力変換装置
20日前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
往復動内燃機関
28日前
株式会社アイシン
有機酸除去方法
1か月前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
モータ制御装置
1か月前
株式会社アイシン
往復動内燃機関
28日前
株式会社アイシン
トルク伝達装置
今日
株式会社アイシン
車両用駆動装置
20日前
株式会社アイシン
経路提案システム
27日前
株式会社アイシン
回転電機用ロータ
21日前
株式会社アイシン
情報提供システム
27日前
株式会社アイシン
情報提供システム
27日前
株式会社アイシン
燃焼ガス出力装置
19日前
株式会社アイシン
飲酒検知システム
今日
株式会社アイシン
回転電機駆動装置
26日前
株式会社アイシン
燃料電池システム
20日前
株式会社アイシン
燃料電池システム
20日前
株式会社アイシン
バッテリユニット
26日前
株式会社アイシン
二酸化炭素回収装置
1か月前
株式会社アイシン
ダイナミックダンパ
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ