TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071445
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181618
出願日
2023-10-23
発明の名称
自律移動体
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250428BHJP(制御;調整)
要約
【課題】走行ユニットと上部ユニットとが互いの運動状態によって影響を受けることを抑制することができる。
【解決手段】本実施形態の自律移動体は、駆動輪および車台を有し、前後への直進走行および左右への旋回が可能な走行ユニットと、走行ユニットの上部に配置され、走行ユニットの直進走行および旋回によって生じる振動を緩和することが可能な振動緩和機構を有する上部ユニットと、走行ユニットを制御する第1の制御部と、上部ユニットを制御する第2の制御部と、を備え、第1及び第2の制御部は、相互に互いのユニットの運動状態を示す情報を取得し、取得した情報に基づいて、走行ユニットと上部ユニットとが連動するように制御する。
【選択図】図5
特許請求の範囲
【請求項1】
駆動輪および車台を有し、前後への直進走行および左右への旋回が可能な走行ユニットと、
前記走行ユニットの上部に配置され、前記走行ユニットの前記直進走行および前記旋回によって生じる振動を緩和することが可能な振動緩和機構を有する上部ユニットと、
前記走行ユニットを制御する第1の制御部と、
前記上部ユニットを制御する第2の制御部と、を備え、
前記第1及び第2の制御部は、
相互に互いのユニットの運動状態を示す情報を取得し、取得した前記情報に基づいて、前記走行ユニットと前記上部ユニットとが連動するように制御する、
自律移動体。
続きを表示(約 470 文字)
【請求項2】
前記第2の制御部は、
前記走行ユニットが前記直進走行を行っていることを示す情報を取得すると、前記直進走行の情報に基づいて前記走行ユニットと連動するように前記上部ユニットを制御する、
請求項1に記載の自律移動体。
【請求項3】
前記第2の制御部は、
前記走行ユニットが前記直進走行を行っている場合に、前記走行ユニットの走行方向と異なる方向に前記上部ユニットに生じた加速度を検知した場合、前記加速度を検知した方向の前記加速度に対するゲインを低下させて前記振動緩和機構を制御する、
請求項2に記載の自律移動体。
【請求項4】
前記振動緩和機構は、
前記上部ユニットに配置される天板を振子運動させる振子機構を含み、
前記第1の制御部は、
前記天板が前記振子運動をしていることを示す情報を取得すると、前記天板の前記振子運動の情報に基づいて前記上部ユニットと連動するように前記走行ユニットを制御する、
請求項1に記載の自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
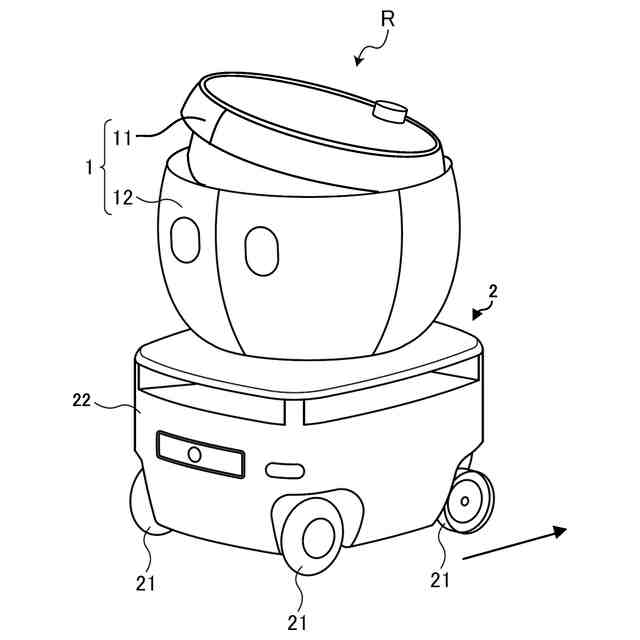
自律的に移動可能なロボット等の自律移動体が開発されている。自律移動体は、駆動輪等を有する走行ユニットを備え、また例えば、走行ユニットが走行することで生じる振動を緩和する機構を備えた上部ユニットを備えている。
【0003】
例えば特許文献1の配送ロボットは、配送物が載置される載置部を揺動可能に支持する揺動機構を備えており、これにより、配送ロボットの走行によって生じる振動を緩和する。
【先行技術文献】
【特許文献】
【0004】
特開2023-104439号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、走行ユニットの走行状態によっては、振動を充分に緩和しきれない場合がある。また、振動を緩和する機構による上部ユニットの運動によって、走行ユニットが影響を受けてしまう場合もある。
【0006】
本発明は、上記に鑑みてなされたものであって、走行ユニットと上部ユニットとが互いの運動状態によって影響を受けることを抑制することができる自律移動体を提供することを課題とする。
【課題を解決するための手段】
【0007】
本実施形態の自律移動体は、駆動輪および車台を有し、前後への直進走行および左右への旋回が可能な走行ユニットと、前記走行ユニットの上部に配置され、前記走行ユニットの前記直進走行および前記旋回によって生じる振動を緩和することが可能な振動緩和機構を有する上部ユニットと、前記走行ユニットを制御する第1の制御部と、前記上部ユニットを制御する第2の制御部と、を備え、前記第1及び第2の制御部は、相互に互いのユニットの運動状態を示す情報を取得し、取得した前記情報に基づいて、前記走行ユニットと前記上部ユニットとが連動するように制御する。
【発明の効果】
【0008】
本実施形態によれば、走行ユニットと上部ユニットとが互いの運動状態によって影響を受けることを抑制することができる。
【図面の簡単な説明】
【0009】
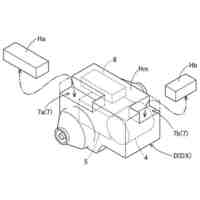
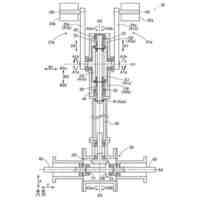
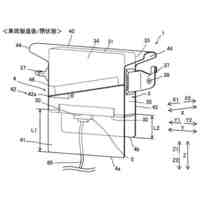
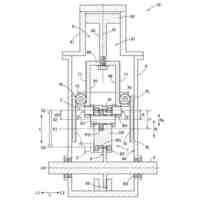
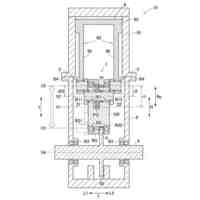
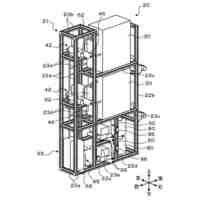
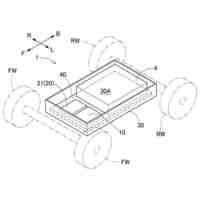
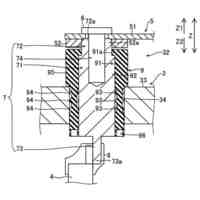
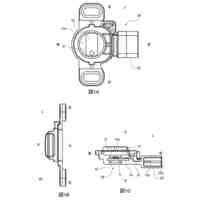
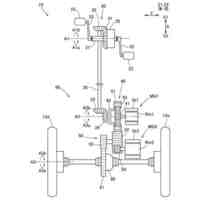
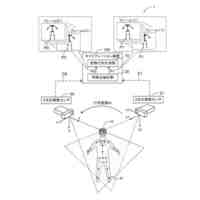
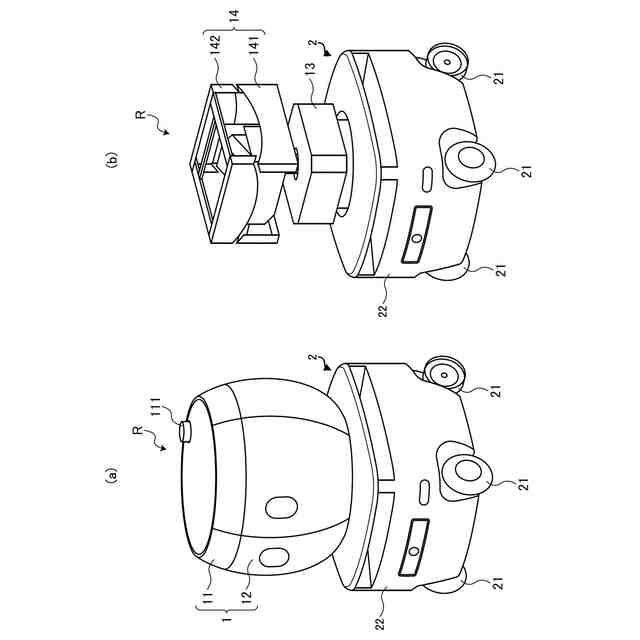
図1は、実施形態にかかる自律走行ロボットの構造の一例を示す図である。
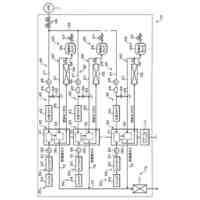
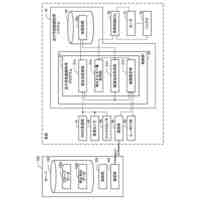
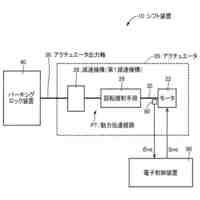
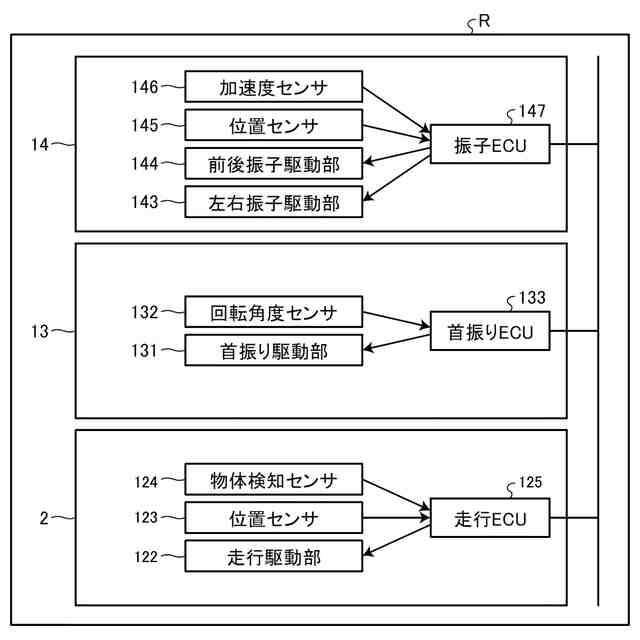
図2は、実施形態かかる自律走行ロボットの機能構成の一例を示すブロック図である。
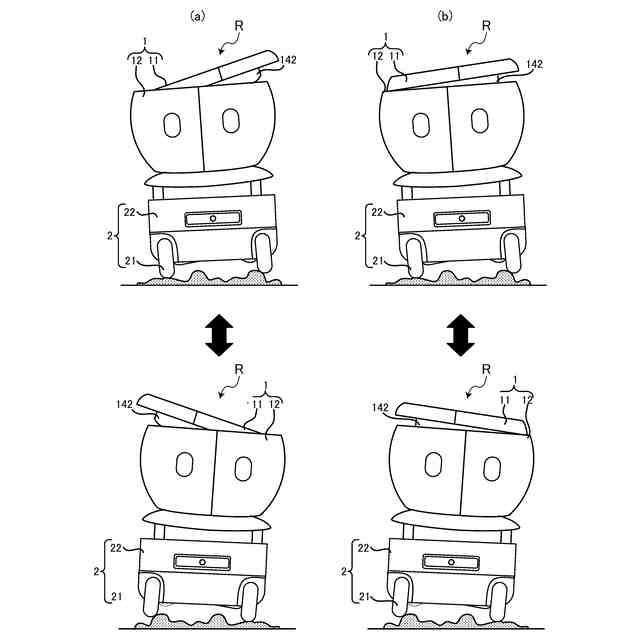
図3は、実施形態にかかる振子ECUが、走行ユニットと連動するように上部ユニットの天板を制御する場合の一例を示す模式図である。
図4は、実施形態にかかる走行ECUが、上部ユニットと連動するように走行ユニットを制御する場合の一例を示す模式図である。
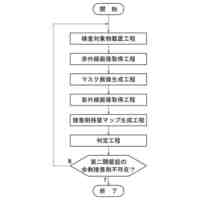
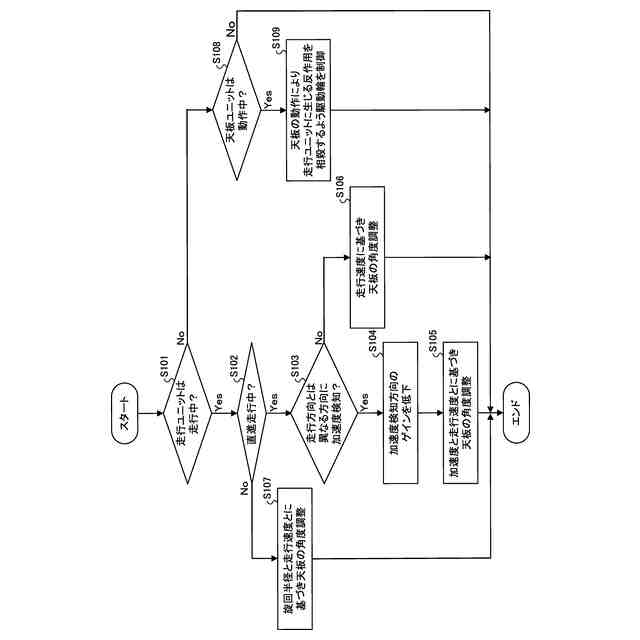
図5は、実施形態にかかる振子ECU及び走行ECUによる自律走行ロボットの制御処理の手順の一例を示すフロー図である。
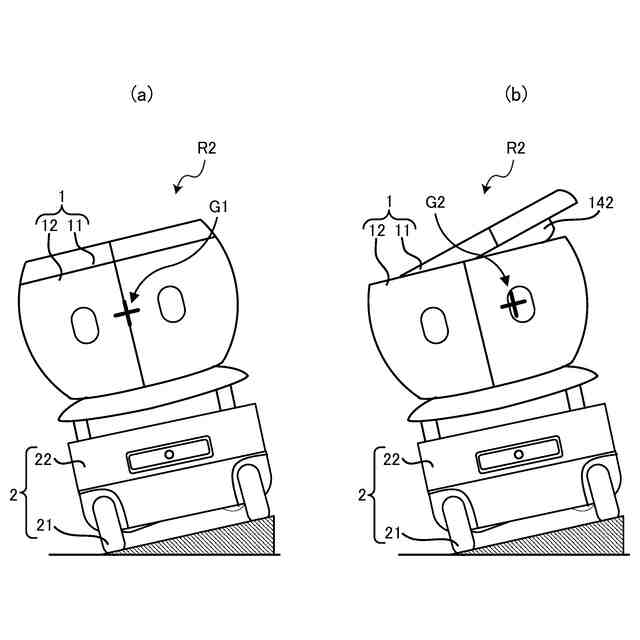
図6は、実施形態の変形例にかかる振子ECUが、走行ユニットと連動するように上部ユニットの天板を制御する場合の一例を示す模式図である。
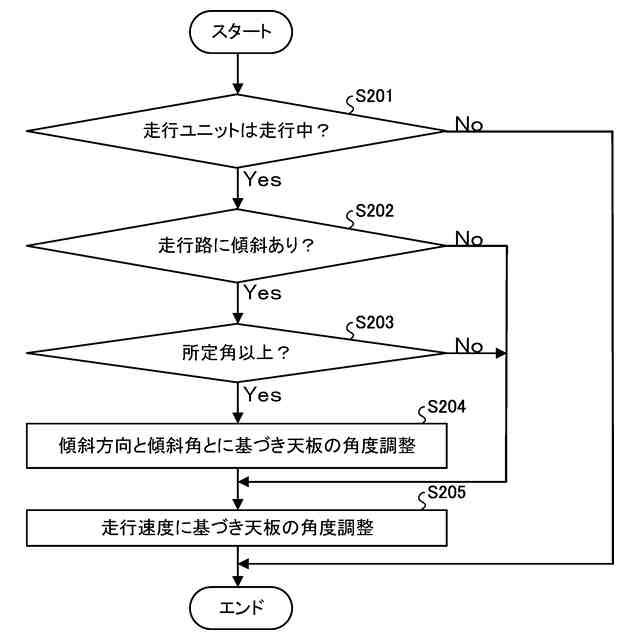
図7は、実施形態の変形例にかかる振子ECU及び走行ECUによる自律走行ロボットの制御処理の手順の一例を示すフロー図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本実施形態の自律走行ロボットについて説明する。なお、以下の説明において、「前後(方向)」とは、自律走行ロボットの走行方向に平行な方向を示す。また、「左右(方向)」とは、自律走行ロボットの走行方向に垂直な方向であって、地面と平行な方向を示す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
MRAM
14日前
株式会社アイシン
車体下部構造
9日前
株式会社アイシン
電力変換装置
9日前
株式会社アイシン
車両制御装置
7日前
株式会社アイシン
動力変換装置
7日前
株式会社アイシン
電子制御装置
8日前
株式会社アイシン
往復動内燃機関
17日前
株式会社アイシン
往復動内燃機関
17日前
株式会社アイシン
車両用駆動装置
9日前
株式会社アイシン
燃料電池システム
9日前
株式会社アイシン
経路提案システム
16日前
株式会社アイシン
情報提供システム
16日前
株式会社アイシン
情報提供システム
16日前
株式会社アイシン
バッテリユニット
15日前
株式会社アイシン
燃焼ガス出力装置
8日前
株式会社アイシン
燃料電池システム
9日前
株式会社アイシン
回転電機用ロータ
10日前
株式会社アイシン
回転電機駆動装置
15日前
株式会社アイシン
工作機械の安全装置
9日前
株式会社アイシン
投稿感情予測システム
16日前
株式会社アイシン
ペロブスカイト太陽電池
7日前
株式会社アイシン
ペロブスカイト太陽電池
14日前
株式会社アイシン
電子部品および製造方法
16日前
株式会社アイシン
走行可能範囲取得システム
15日前
株式会社アイシン
電動アシスト自転車用駆動装置
9日前
株式会社アイシン
制御システム、及び制御プログラム
15日前
トヨタ自動車株式会社
シフト装置
16日前
株式会社アイシン
余剰接着剤の検出装置及び余剰接着剤の検出方法
9日前
株式会社アイシン
乾式摩擦材及びその製造方法並びに乾式摩擦材用組成物及びその製造方法
17日前
株式会社豊田中央研究所
キャリブレーション装置、3次元座標検出システム、及びコンピュータプログラム
14日前
株式会社FUJI
工作機械
23日前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
28日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ