TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025098459
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023214596
出願日
2023-12-20
発明の名称
走行可能範囲取得システム
出願人
株式会社アイシン
代理人
Knowledge Partners弁理士法人
主分類
G01C
21/26 20060101AFI20250625BHJP(測定;試験)
要約
【課題】走行可能範囲の推定精度が向上する可能性を高める技術の提供。
【解決手段】車両の現在地を取得する現在地取得部と、前記車両の残エネルギー量を取得する残エネルギー量取得部と、前記車両が現在地から走行する場合に、前記車両が減速することが推定される減速要因を有する減速地点を地図情報に基づいて取得する減速地点取得部と、前記減速要因のために前記減速地点で前記車両が減速し再加速して走行する場合に、前記残エネルギー量で、前記車両が現在地から走行可能な走行可能範囲を推定する範囲推定部と、を備える走行可能範囲取得システムを構成する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の現在地を取得する現在地取得部と、
前記車両の残エネルギー量を取得する残エネルギー量取得部と、
前記車両が現在地から走行する場合に、前記車両が減速することが推定される減速要因を有する減速地点を地図情報に基づいて取得する減速地点取得部と、
前記減速要因のために前記減速地点で前記車両が減速し再加速して走行する場合に、前記残エネルギー量で、前記車両が現在地から走行可能な走行可能範囲を推定する範囲推定部と、
を備える走行可能範囲取得システム。
続きを表示(約 540 文字)
【請求項2】
前記減速地点は、一時停止地点、信号機のある直進交差点、右左折を要する交差点、カーブ区間の地点の少なくともいずれかを含む、
請求項1に記載の走行可能範囲取得システム。
【請求項3】
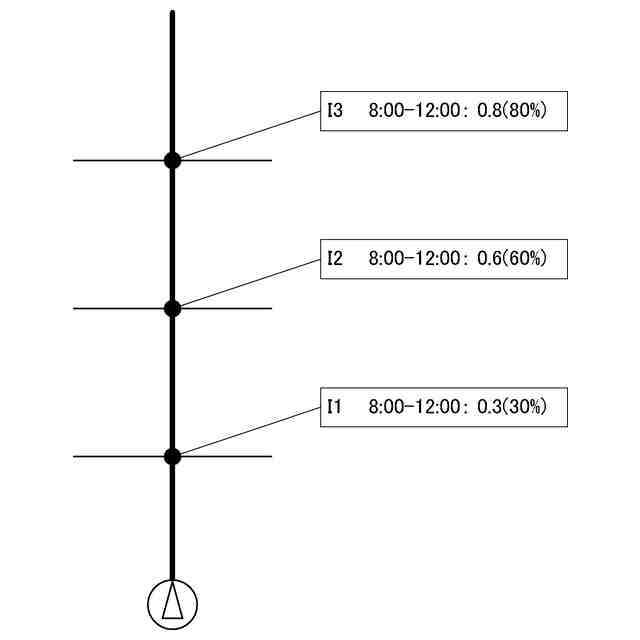
前記範囲推定部は、前記車両の走行予定経路に基づいて、前記減速地点としての信号機のある直進交差点それぞれの通過予想時刻を算出し、前記通過予想時刻における信号機のある直進交差点での停止割合に応じた減速回数を算出し、前記減速回数だけ減速し再加速して走行することを含む場合の前記走行可能範囲を推定する、
請求項1または請求項2に記載の走行可能範囲取得システム。
【請求項4】
前記直進交差点での信号機による停止割合はプローブデータに基づいて取得され、
前記プローブデータに基づく停止割合が取得できない場合は、前記走行予定経路と前記直進交差点で交差する交差道路の道路規模と、前記直進交差点における前記走行予定経路の道路規模との比較結果に基づいて停止割合が取得され、
前記走行予定経路の道路規模が前記交差道路の道路規模より小さい場合は、大きい場合よりも、停止割合が大きい、
請求項3に記載の走行可能範囲取得システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行可能範囲取得システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、電動車両の航続可能距離を算出するための様々な手法が提案されている。特許文献1には、車両の電費と残電力量に基づいて車両の航続可能距離を算出するにあたり、車両の走行状態が降坂路走行状態及び非降坂路走行状態のいずれであるかを判定し、車両が降坂路走行状態である場合に、電費の良化を制限することが記載されている。特許文献2には、移動体の走行時に使用する機器(空調等)の消費エネルギーに応じて航続可能範囲を変化させる手法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-109081号公報
特開2018-066759号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、車両が走行可能な範囲を推定する際に、従来は、車両が減速したり一時停止したりすることについて考慮されていなかった。同じ区間を減速せずに一定車速で走行する場合と、減速し再加速して走行する場合とでは、消費電力量は異なる。
本発明は、上記課題にかんがみてなされたもので、走行可能範囲の推定精度が向上する可能性を高める技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、走行可能範囲取得システムは、車両の現在地を取得する現在地取得部と、車両の残エネルギー量を取得する残エネルギー量取得部と、車両が現在地から走行する場合に、車両が減速することが推定される減速要因を有する減速地点を地図情報に基づいて取得する減速地点取得部と、減速要因のために減速地点で車両が減速し再加速して走行する場合に、残エネルギー量で、車両が現在地から走行可能な走行可能範囲を推定する範囲推定部と、を備える。
【0006】
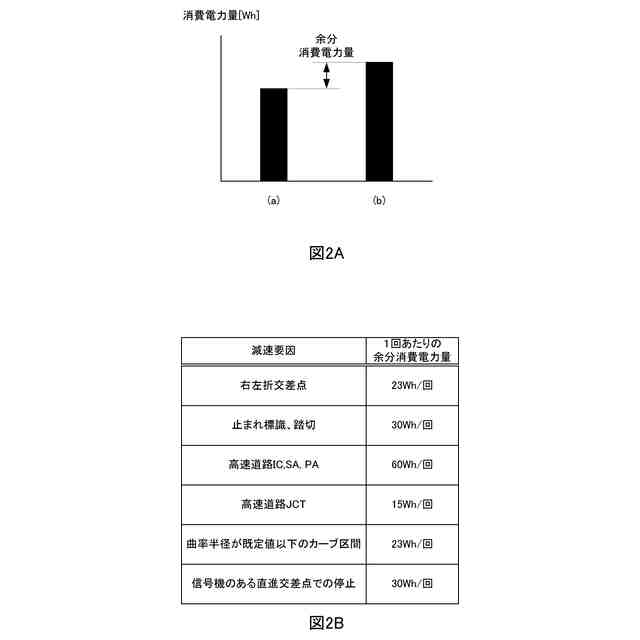
減速地点で減速要因のために減速し再加速して走行する場合、減速地点で減速せずに定速で走行する場合よりも余分にエネルギーを消費する。走行可能範囲取得システムは、減速地点で減速要因のために減速し再加速して走行することを考慮して走行可能範囲を推定するため、減速を考慮しない場合と比較して、走行可能範囲の推定精度が向上する可能性を高めることができる。
【図面の簡単な説明】
【0007】
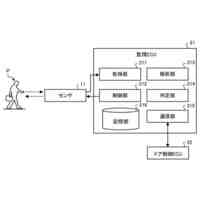
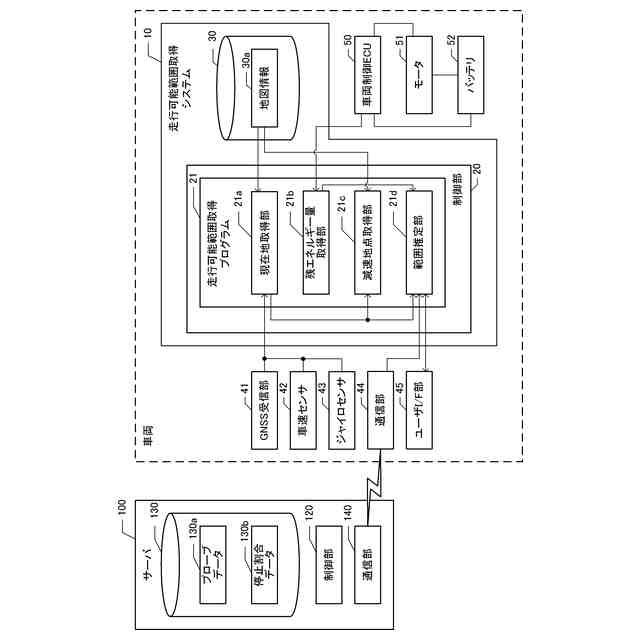
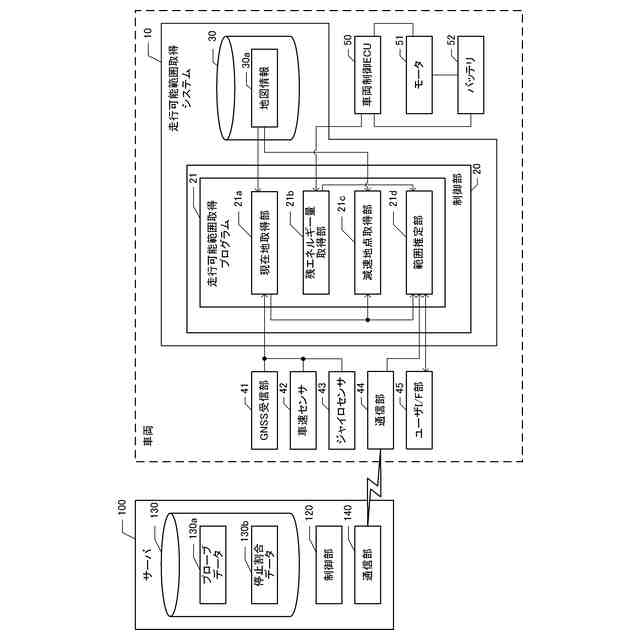
走行可能範囲取得システムの構成を示すブロック図。
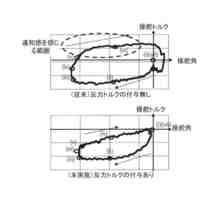
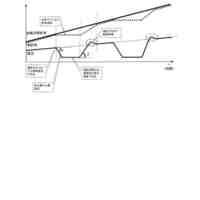
図2Aは減速して再加速する場合に余分に消費される電力量を説明する図、図2Bは減速要因に応じた余分消費電力量の例を示す図。
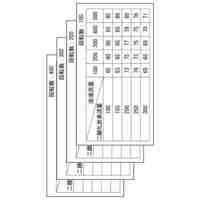
図3は、信号機のある直進交差点の停止割合の例を説明する図。
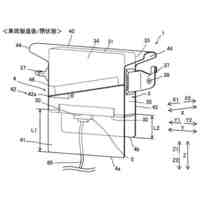
図4Aおよび図4Bは走行可能範囲の表示例を示す図。
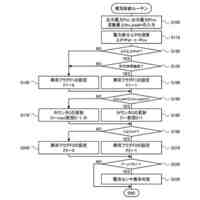
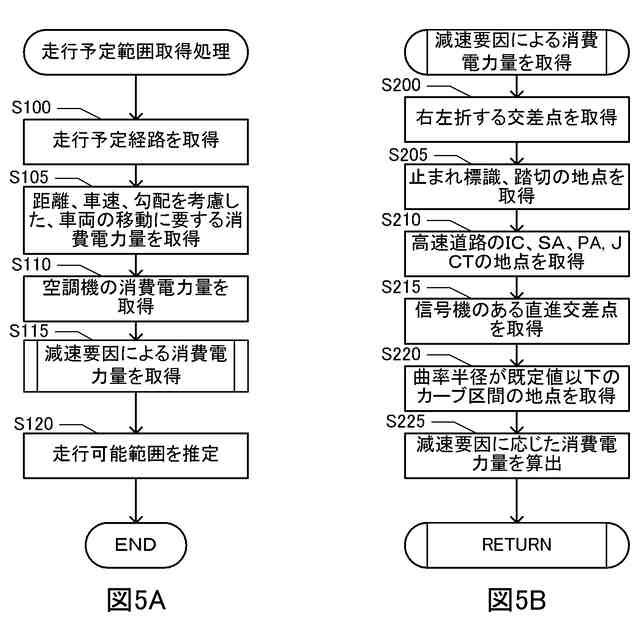
図5Aは走行予定範囲取得処理のフローチャート、図5Bは減速要因による消費電力量の取得処理のフローチャート。
【発明を実施するための形態】
【0008】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)走行可能範囲取得システムの構成:
(2)走行可能範囲取得処理:
(3)他の実施形態:
【0009】
(1)走行可能範囲取得システムの構成:
図1は、車両に搭載された走行可能範囲取得システム10の構成を示すブロック図である。この走行可能範囲取得システム10は、車両の現在の残エネルギー量で走行することが可能な走行可能範囲(本実施形態においては、目的地までの走行予定経路上で走行可能な範囲)を取得しユーザI/F部45の表示部等に表示させるシステムである。本実施形態において、走行可能範囲取得システム10は、車両に搭載され、ナビゲーションシステムによって実現される。本実施形態に係る車両は、充電可能な蓄電池であるバッテリ52を搭載しており、バッテリ52が蓄積している電力をモータ51に供給して駆動する電気自動車(BEV:Battery Electric Vehicle)である。すなわち図1に示す走行可能範囲取得システム10は、バッテリ52の現在の残電力量で走行することが可能である走行可能範囲を取得する。
【0010】
走行可能範囲取得システム10は、CPU、RAM、ROM等を備える制御部20、および、記録媒体30を備えている。制御部20は、ROM等に記憶された走行可能範囲取得プログラム21を実行することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
流路部材
1か月前
株式会社アイシン
電子機器
1か月前
株式会社アイシン
監視装置
1か月前
株式会社アイシン
MRAM
25日前
株式会社アイシン
電動ポンプ
1か月前
株式会社アイシン
温度調節器
6日前
株式会社アイシン
温度調節器
1か月前
株式会社アイシン
動力変換装置
28日前
株式会社アイシン
電力変換装置
20日前
株式会社アイシン
車体下部構造
20日前
株式会社アイシン
電子制御装置
19日前
株式会社アイシン
車両制御装置
1か月前
株式会社アイシン
動力変換装置
18日前
株式会社アイシン
電力システム
1か月前
株式会社アイシン
車両制御装置
18日前
株式会社アイシン
動力伝達装置
1か月前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
トルク伝達装置
今日
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
有機酸除去方法
1か月前
株式会社アイシン
往復動内燃機関
28日前
株式会社アイシン
モータ制御装置
1か月前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
往復動内燃機関
28日前
株式会社アイシン
車両用駆動装置
20日前
株式会社アイシン
飲酒検知システム
今日
株式会社アイシン
燃料電池システム
20日前
株式会社アイシン
回転電機用ロータ
21日前
株式会社アイシン
燃焼ガス出力装置
19日前
株式会社アイシン
燃料電池システム
20日前
株式会社アイシン
バッテリユニット
26日前
株式会社アイシン
経路提案システム
27日前
株式会社アイシン
情報提供システム
27日前
株式会社アイシン
情報提供システム
27日前
株式会社アイシン
回転電機駆動装置
26日前
株式会社アイシン
二酸化炭素回収装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ