TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065986
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175541
出願日
2023-10-10
発明の名称
自律移動システム
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/43 20240101AFI20250415BHJP(制御;調整)
要約
【課題】効率的なドッキングリトライ処理を実行することができる技術を提供する。
【解決手段】作業ロボットは、作業ロボットを移動させる移動部と、移動部を駆動する移動用モータと、バッテリと、移動用モータを制御する制御部と、ロボット受電部と、を備えている。充電ステーションは、ステーション送電部と、地面上に載置されるステーション板と、を備えている。制御部は、作業ロボットが充電ステーションにドッキングしている状態でバッテリの充電を開始できない充電不可能状態であるときに、移動部により作業ロボットを移動させて、作業ロボットを充電ステーションに再びドッキングさせるドッキングリトライ処理を実行する。ドッキングリトライ処理が実行されている間に作業ロボットが移動するとき、作業ロボットの少なくとも一部分は、作業ロボットを地面に直交する方向に見るときにステーション板上に配置されている。
【選択図】図14
特許請求の範囲
【請求項1】
作業エリア内を自律移動しながら作業する作業ロボットと、
前記作業ロボットとドッキング可能であり、前記作業ロボットを充電する充電ステーションと、を備えており、
前記作業ロボットは、
作業を行う作業部と、
前記作業ロボットを移動させる移動部と、
前記移動部を駆動する移動用モータと、
前記充電ステーションで充電され、前記移動用モータに電力を供給するバッテリと、
前記移動用モータを制御する制御部と、
前記作業ロボットが前記充電ステーションにドッキングしているときに前記充電ステーションから前記バッテリを充電する電力を受け取るロボット受電部と、を備えており、
前記充電ステーションは、
前記ロボット受電部に前記バッテリを充電する前記電力を供給するステーション送電部と、
地面上に載置されるステーション板と、を備えており、
前記制御部は、前記作業ロボットが前記充電ステーションにドッキングしている状態で前記バッテリの充電を開始できない充電不可能状態であるときに、前記移動部により前記作業ロボットを移動させて、前記作業ロボットを前記充電ステーションに再びドッキングさせるドッキングリトライ処理を実行し、
前記ドッキングリトライ処理が実行されている間に前記作業ロボットが移動するとき、前記作業ロボットの少なくとも一部分は、前記作業ロボットを前記地面に直交する方向に見るときに前記ステーション板上に配置されている、自律移動システム。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボット受電部は、前記作業ロボットが前記充電ステーションにドッキングしているときに前記充電ステーションに電気的に接続可能なロボット充電端子であり、
前記ステーション送電部は、前記ロボット充電端子と電気的に接続可能なステーション充電端子であり、
前記ドッキングリトライ処理は、前記作業ロボットを前記充電ステーションから離反させる離反処理を備えており、
前記離反処理後に、前記ロボット充電端子は、前記ステーション充電端子から離れている、請求項1に記載の自律移動システム。
【請求項3】
前記ドッキングリトライ処理において、前記制御部は、前記移動用モータを予め定められた回転回数で駆動する、請求項1または2に記載の自律移動システム。
【請求項4】
前記ドッキングリトライ処理が実行されている間、前記作業ロボットの車長方向における長さの50%以上に対応する領域は、前記作業ロボットを前記地面に直交する方向に見るときに前記ステーション板上に配置されている、請求項1から3のいずれか一項に記載の自律移動システム。
【請求項5】
前記作業ロボットを前記地面に直交する方向に見るとき、前記作業ロボットは、第1面積を有しており、
前記ドッキングリトライ処理が実行されている間、前記作業ロボットの前記第1面積の50%以上に対応する領域が、前記作業ロボットを前記地面に直交する方向に見るときに前記ステーション板上に配置されている、請求項1から3のいずれか一項に記載の自律移動システム。
【請求項6】
前記ドッキングリトライ処理は、
前記作業ロボットを後退させる後退処理と、
前記後退処理後に前記作業ロボットを前進させる前進処理と、を備えている、請求項1から5のいずれか一項に記載の自律移動システム。
【請求項7】
前記後退処理において前記作業ロボットが後退する後退距離は、50mm以上かつ650mm以下である、請求項6に記載の自律移動システム。
【請求項8】
前記後退距離は、150mm以上かつ300mm以下である、請求項7に記載の自律移動システム。
【請求項9】
ユーザに報知する報知部をさらに備えている、
前記制御部は、前記ドッキングリトライ処理を1回以上実行可能であり、実行済みの前記ドッキングリトライ処理の回数が基準回数以上であるとき、前記報知部を制御する、請求項1から8のいずれか一項に記載の自律移動システム。
【請求項10】
前記制御部は、実行済みの前記ドッキングリトライ処理の前記回数が前記基準回数以上であるとき、前記移動用モータを停止する、請求項9に記載の自律移動システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、自律移動システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1には、自律移動システムが開示されている。自律移動システムは、作業エリア内を自律移動しながら作業する作業ロボットと、作業ロボットとドッキング可能であり、作業ロボットを充電する充電ステーションと、を備えている。作業ロボットは、作業を行う作業部と、作業ロボットを移動させる移動部と、移動部を駆動する移動用モータと、充電ステーションで充電され、移動用モータに電力を供給するバッテリと、移動用モータを制御する制御部と、作業ロボットが充電ステーションにドッキングしているときに充電ステーションからバッテリを充電する電力を受け取るロボット受電部と、を備えている。充電ステーションは、ロボット受電部にバッテリを充電する電力を供給するステーション送電部と、地面上に載置されるステーション板と、を備えている。制御部は、作業ロボットが充電ステーションにドッキングしている状態でバッテリの充電を開始できない充電不可能状態であるときに、移動部により作業ロボットを移動させて、作業ロボットを充電ステーションに再びドッキングさせるドッキングリトライ処理を実行する。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2013/0006418号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような自律移動システムでは、効率的なドッキングリトライ処理が実行されることが望まれる。本明細書では、効率的なドッキングリトライ処理を実行することができる技術を提供する。
【課題を解決するための手段】
【0005】
本明細書は、自律移動システムを開示する。自律移動システムは、作業エリア内を自律移動しながら作業する作業ロボットと、作業ロボットとドッキング可能であり、作業ロボットを充電する充電ステーションと、を備えている。作業ロボットは、作業を行う作業部と、作業ロボットを移動させる移動部と、移動部を駆動する移動用モータと、充電ステーションで充電され、移動用モータに電力を供給するバッテリと、移動用モータを制御する制御部と、作業ロボットが充電ステーションにドッキングしているときに充電ステーションからバッテリを充電する電力を受け取るロボット受電部と、を備えている。充電ステーションは、ロボット受電部にバッテリを充電する電力を供給するステーション受電部と、地面上に載置されるステーション板と、を備えている。制御部は、作業ロボットが充電ステーションにドッキングしている状態でバッテリの充電を開始できない充電不可能状態であるときに、移動部により作業ロボットを移動させて、作業ロボットを充電ステーションに再びドッキングさせるドッキングリトライ処理を実行する。ドッキングリトライ処理が実行されている間に作業ロボットが移動するとき、作業ロボットの少なくとも一部分は、作業ロボットを地面に直交する方向に見るときにステーション板上に配置されている。
【0006】
上記の構成によれば、ドッキングリトライ処理において、作業ロボットが移動している間、作業ロボットの少なくとも一部分は、ステーション板上に維持される。このため、作業ロボットがステーション板を離れて移動する構成と比較して、作業ロボットの移動距離が短い。これにより、効率的なドッキングリトライ処理を実行することができる。
【図面の簡単な説明】
【0007】
第1実施例の自律移動システム10の概略図である。
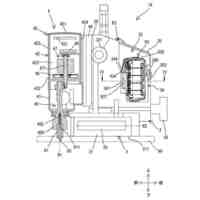
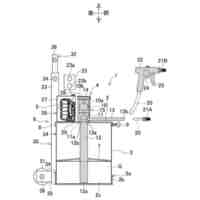
第1実施例の作業ロボット12と充電ステーション14の側面図である。
第1実施例の作業ロボット12の前面図である。
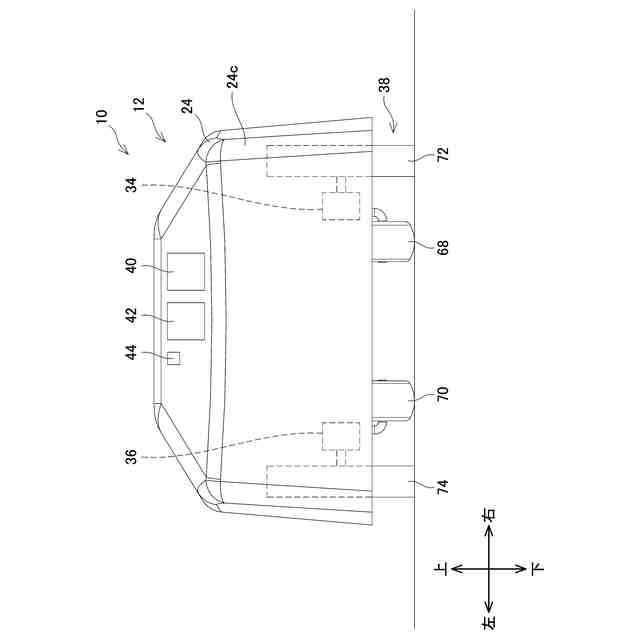
第1実施例の作業ロボット12の後面図である。
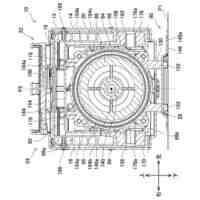
第1実施例の作業ロボット12の上面図である。
第1実施例の作業ロボット12の電気ブロック図である。
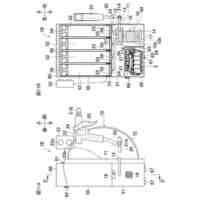
第1実施例の充電ステーション14近傍の自律移動システム10の概略図である。
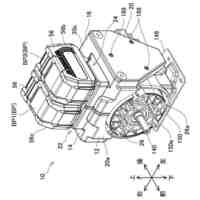
第1実施例の充電ステーション14のドッキング部98の拡大斜視図である。
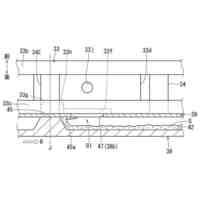
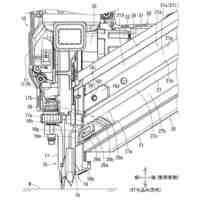
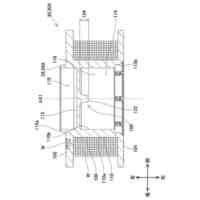
第1実施例の自律移動システム10において、作業ロボット12が充電ステーション14にドッキングしているときの断面図である。
第1実施例の第1電気信号の電流波形CW1と第2電気信号の電流波形CW2を示す図である。
第1実施例の作業エリアWA内部と外部での磁界の強度の波形を示す図である。
第1実施例のステーションワイヤ20内部と外部での磁界の強度の波形を示す図である。
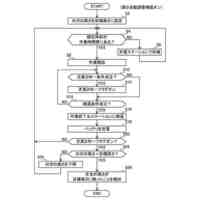
第1実施例の自律制御処理を示すフローチャートである。
第1実施例のドッキング処理を示すフローチャートである。
第1実施例において、ドッキングリトライ処理の後退処理後の作業ロボット12と充電ステーション14の上面図である。
第1実施例において、ドッキングリトライ処理の前進処理後の作業ロボット12と充電ステーション14の上面図である。
第2実施例のドッキング処理を示すフローチャートである。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された自律移動システム、その製造方法及び使用方法を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
24日前
株式会社マキタ
作業機
24日前
株式会社マキタ
電動工具
2日前
株式会社マキタ
クリーナ
1か月前
株式会社マキタ
管拡径工具
17日前
株式会社マキタ
電動作業機
5日前
株式会社マキタ
作業ロボット
25日前
株式会社マキタ
作業ロボット
25日前
株式会社マキタ
磁気ボール盤
2日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
磁気ボール盤
2日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
磁気ボール盤
4日前
株式会社マキタ
磁気ボール盤
4日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
モータユニット
1か月前
株式会社マキタ
グリース吐出装置
16日前
株式会社マキタ
自律移動システム
25日前
株式会社マキタ
鉄筋結束機およびリール
1か月前
株式会社マキタ
モータユニットおよび作業機
1か月前
株式会社マキタ
グリース吐出装置及びグリース注油システム
16日前
株式会社マキタ
インパクト工具、スピンドル及びスピンドルの製造方法
1か月前
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
4日前
株式会社やまびこ
走行制御装置
25日前
トヨタ自動車株式会社
移動体、及び制御方法
2日前
株式会社ダイフク
物品搬送設備
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ