TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042346
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149295
出願日
2023-09-14
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
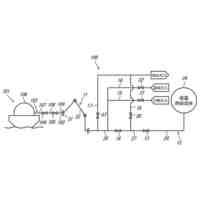
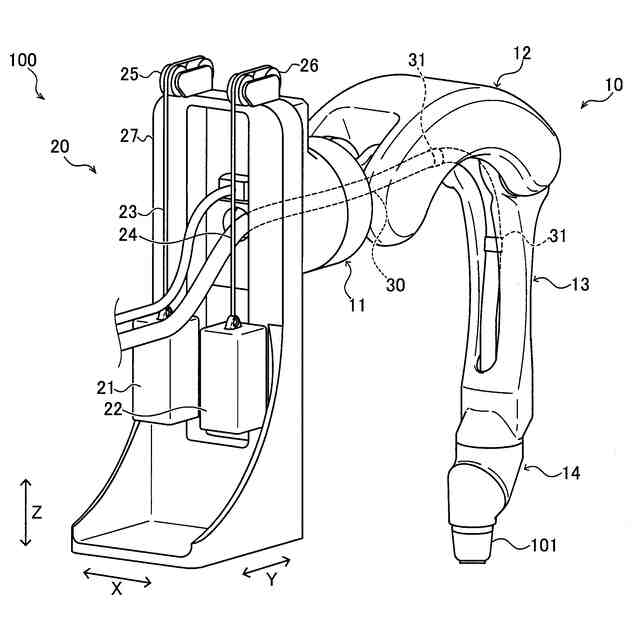
【課題】ロボットの配置領域をコンパクトにすることが可能なロボットを提供する。
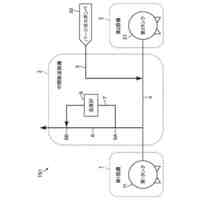
【解決手段】このロボット100は、各々の回転軸線周りに回転する複数の関節部を含む垂直多関節のロボットアーム部10と、電気ケーブルと流体用ホースとの少なくとも一方を含むチューブ部30とを備える。チューブ部30は、複数の関節部のうちの少なくとも1つである所定関節部において、回転軸線の延びる方向から見て、回転軸線を中心として、回転軸線から所定関節部の外表面までの距離を半径とした円形の領域にオーバーラップし、かつ、回転軸線に垂直な方向から見て、所定関節部の外形の内側に配置されている。
【選択図】図1
特許請求の範囲
【請求項1】
各々の回転軸線周りに回転する複数の関節部を含む垂直多関節のロボットアーム部と、
前記複数の関節部のうちの少なくとも1つである所定関節部において、前記回転軸線の延びる方向から見て、前記回転軸線を中心として、前記回転軸線から前記所定関節部の外表面までの距離を半径とした円形の領域にオーバーラップし、かつ、前記回転軸線に垂直な方向から見て、前記所定関節部の外形の内側に配置されている、電気ケーブルと流体用ホースとの少なくとも一方を含むチューブ部と、を備える、ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記所定関節部は、前記回転軸線の延びる方向から見て前記回転軸線の中心とオーバーラップする位置を含み、前記ロボットアーム部の動作に伴って前記チューブ部が配置されるチューブ配置領域を、前記回転軸線に垂直な方向から見て前記所定関節部の外形の内側に有している、請求項1に記載のロボット。
【請求項3】
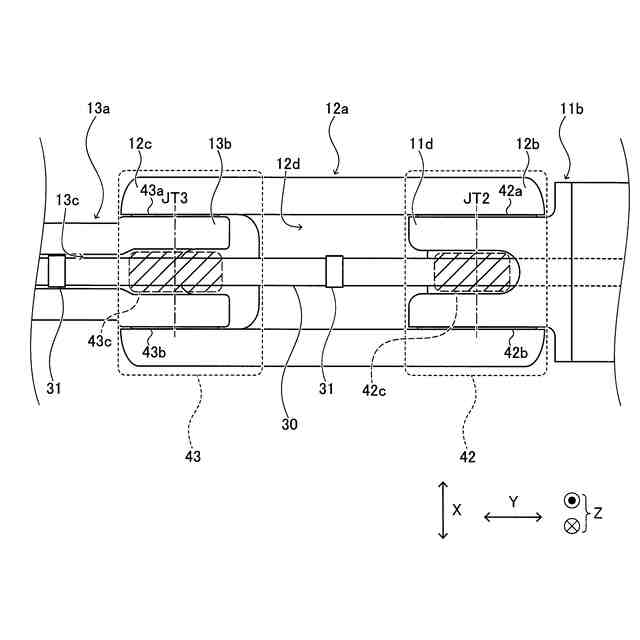
前記所定関節部は、前記回転軸線に沿って互いに対向して配置されている一対の接続部を有し、
前記チューブ部は、前記所定関節部において一対の前記接続部の間に配置されている、請求項1または2に記載のロボット。
【請求項4】
前記ロボットアーム部は、端部が二股に分かれたU字形状を有する一対のリンク部材を含み、
前記所定関節部は、一対の前記リンク部材の各々におけるU字形状の前記端部同士が互いに接続されることによって、前記回転軸線に沿って互いに対向して配置されている一対の前記接続部を有する、請求項3に記載のロボット。
【請求項5】
前記チューブ部は、前記ロボットアーム部の少なくとも一部において、前記ロボットアーム部の幅方向の内側に配置されている、請求項1または2に記載のロボット。
【請求項6】
前記チューブ部は、複数のチューブ部を含み、
前記複数のチューブ部を束ねる結束部をさらに備える、請求項1または2に記載のロボット。
【請求項7】
前記所定関節部は、前記複数の関節部のうちの隣合う1組の前記所定関節部を含み、
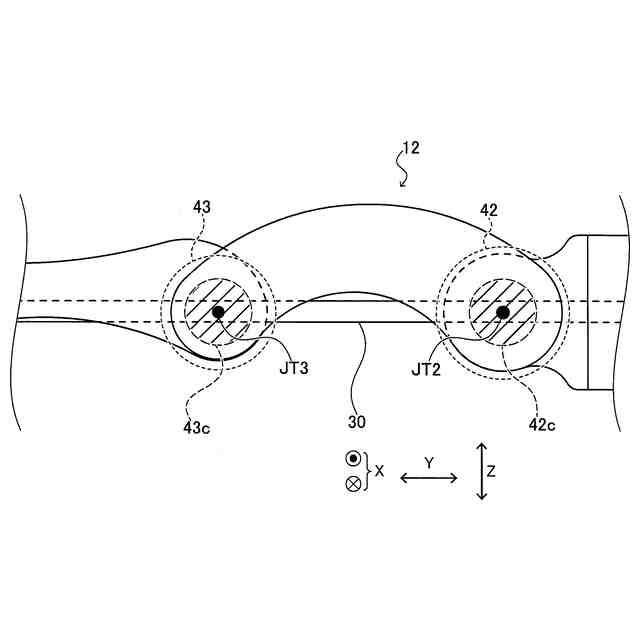
前記チューブ部は、隣合う1組の前記所定関節部の各々において、前記回転軸線の延びる方向から見て、前記円形の領域にオーバーラップし、かつ、前記回転軸線に垂直な方向から見て、前記所定関節部の外形の内側に配置されている、請求項1または2に記載のロボット。
【請求項8】
前記ロボットアーム部は、基端側に配置される下部アーム部と、前記下部アーム部に接続され、先端側に配置される上部アーム部とを含み、
前記所定関節部は、前記複数の関節部のうちの前記下部アーム部の両端の各々に配置されている、請求項7に記載のロボット。
【請求項9】
前記下部アーム部は、湾曲したアーチ形状を有し、
前記チューブ部は、湾曲したアーチ形状を有する前記下部アーム部の両端の各々に配置された前記所定関節部を通過して配置されている、請求項8に記載のロボット。
【請求項10】
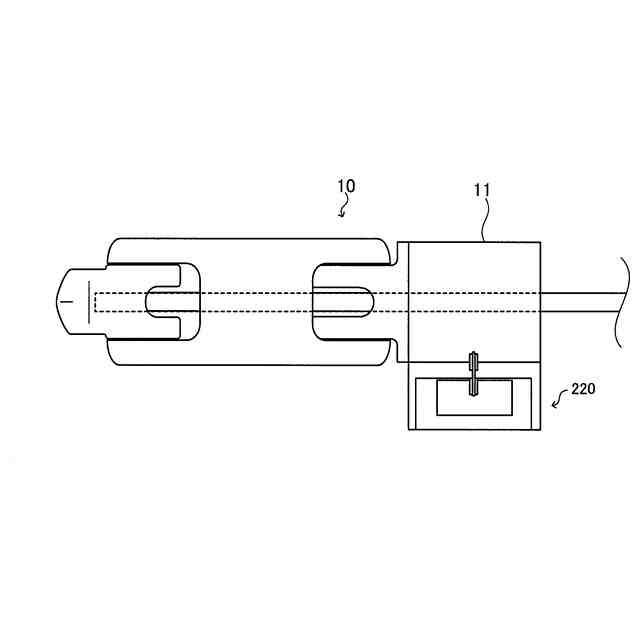
前記ロボットアーム部は、基端側に配置される下部アーム部と、前記下部アーム部に接続され、先端側に配置される上部アーム部と、前記下部アーム部の前記上部アーム部とは反対側の基端側に接続されるベース部とを含み、
前記チューブ部は、前記ベース部の一方側から他方側に直線状に貫通して配置されている、請求項1または2に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、ケーブルを備えるロボットが知られている。たとえば、特許文献1では、アームを駆動するモータに動力を供給する動力ケーブルと信号を送受信する信号ケーブルとを含む駆動ケーブルを備えるロボットが開示されている。上記特許文献1に記載のロボットでは、駆動ケーブルは、ロボットの外表面に沿って配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-13343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載のロボットのように、ロボットの外表面に沿ってケーブルなどのチューブ部を配置する場合には、ロボットの周囲に配置されているワークなどの物体とチューブ部との干渉を考慮してロボットを動作させる必要がある。そのため、チューブ部の干渉を考慮してロボットの配置領域を大きめに設置する必要があるため、ロボットの外表面に沿ってチューブ部を配置する場合には、ロボットの配置領域をコンパクトにできない。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットの配置領域をコンパクトにすることが可能なロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットは、各々の回転軸線周りに回転する複数の関節部を含む垂直多関節のロボットアーム部と、複数の関節部のうちの少なくとも1つである所定関節部において、回転軸線の延びる方向から見て、回転軸線を中心として、回転軸線から所定関節部の外表面までの距離を半径とした円形の領域にオーバーラップし、かつ、回転軸線に垂直な方向から見て、所定関節部の外形の内側に配置されている、電気ケーブルと流体用ホースとの少なくとも一方を含むチューブ部と、を備える。
【0007】
この開示の一の局面によるロボットは、上記のように、複数の関節部のうちの少なくとも1つである所定関節部において、回転軸線の延びる方向から見て、回転軸線を中心として、回転軸線から所定関節部の外表面までの距離を半径とした円形の領域にオーバーラップし、かつ、回転軸線に垂直な方向から見て、所定関節部の外形の内側に配置されている、電気ケーブルと流体用ホースとの少なくとも一方を含むチューブ部を備える。これにより、チューブ部が関節部の外表面に沿うように配置されている場合と異なり、ロボットの動作に伴ってチューブ部が周囲の物体と干渉することを抑制できる。その結果、チューブ部の干渉を考慮せずにロボットを配置できるので、ロボットの配置領域をコンパクトにできる。
【発明の効果】
【0008】
本開示によれば、ロボットの配置領域をコンパクトにできる。
【図面の簡単な説明】
【0009】
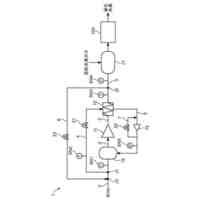
一実施形態によるロボットの全体構成を示した斜視図である。
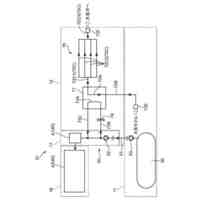
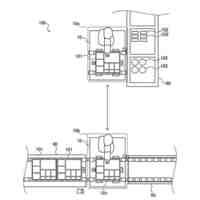
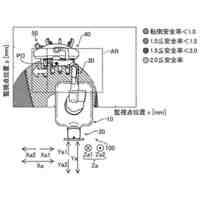
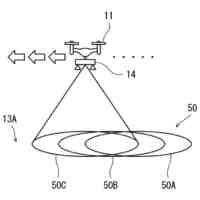
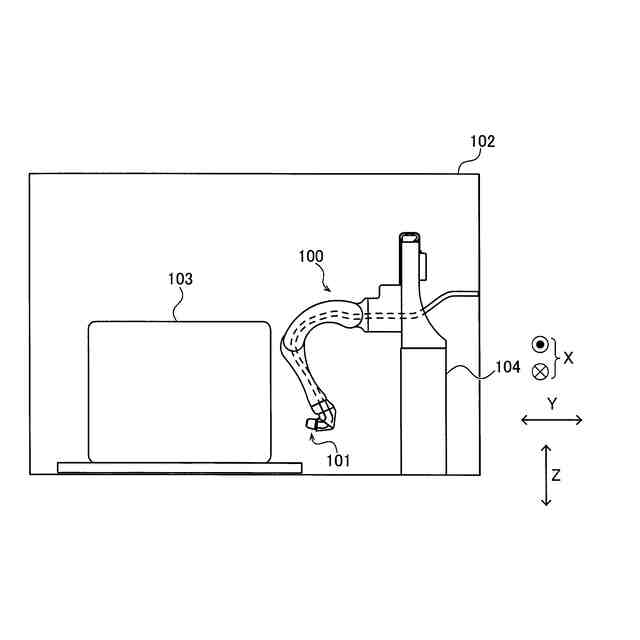
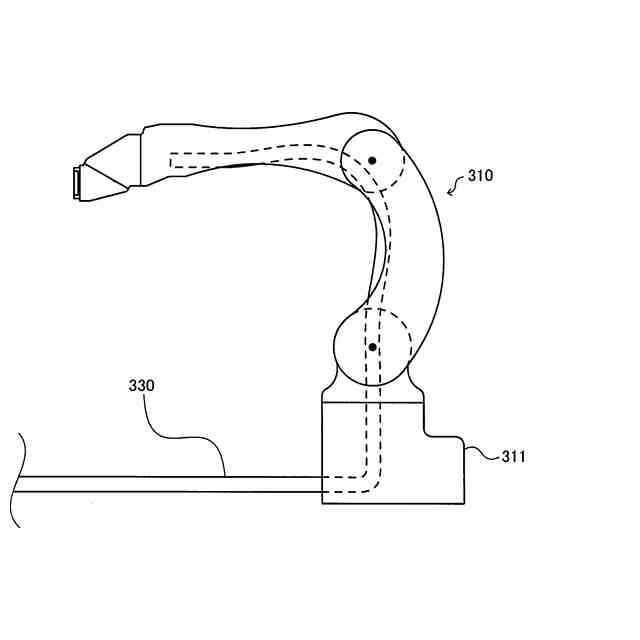
塗装ブースにおけるロボットの配置の一例を示した模式図である。
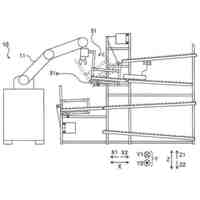
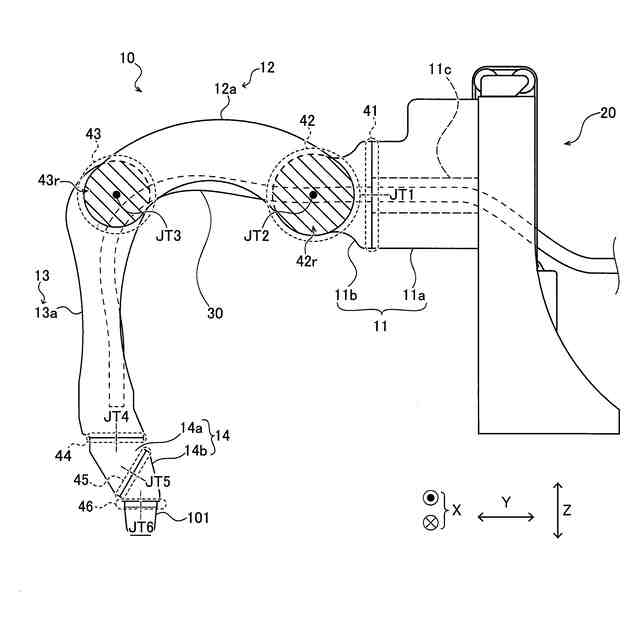
図1のX方向から見たロボットの側面図である。
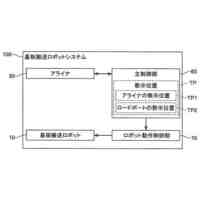
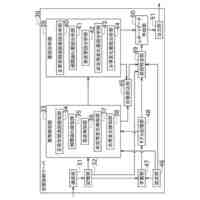
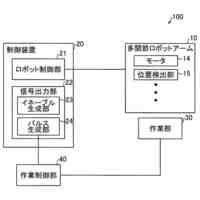
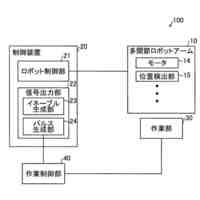
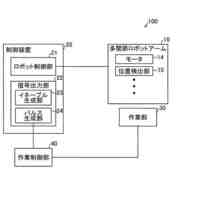
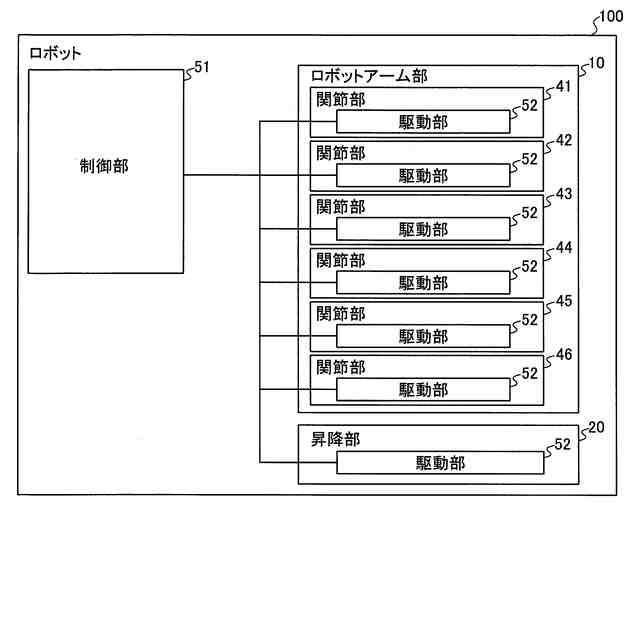
ロボットの制御的な構成を示すブロック図である。
ロボットアーム部を下方から見た図である。
ロボットアーム部を伸展させた状態の一例を示した側面図である。
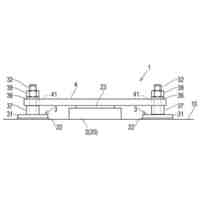
本開示の第1変形例における昇降部の配置を説明するための図である。
本開示の第2変形例におけるロボットアーム部を示した側面図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
水素航空機
5日前
川崎重工業株式会社
竪型タンク
1日前
川崎重工業株式会社
遠心式ターボ機械
今日
川崎重工業株式会社
固定装置及び固定方法
2日前
川崎重工業株式会社
低温流体の移送システム
6日前
川崎重工業株式会社
基板搬送ロボットシステム
19日前
川崎重工業株式会社
流体軸受およびターボ機械
今日
川崎重工業株式会社
アンモニア除害装置及び方法
8日前
川崎重工業株式会社
荷役システム、切離し方法、及び、荷役開始方法
今日
川崎重工業株式会社
異常検知装置、異常検知システム及び異常検知方法
8日前
川崎重工業株式会社
搬送システム、搬送物の搬送方法、および、ロボット
6日前
川崎重工業株式会社
ロボットシステム、ロボット動作方法、および、ロボット
6日前
川崎重工業株式会社
液化水素移送システムおよびその中間移送設備、パージ方法
6日前
川崎重工業株式会社
手術支援システム、手術装置および手術支援システムの制御方法
12日前
川崎重工業株式会社
グリス交換時期予測方法
8日前
川崎重工業株式会社
散布物分布状態の表示処理装置、表示処理方法、及び、表示処理プログラム
19日前
川崎重工業株式会社
ロボットの動作方法およびプログラム
19日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
7日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
19日前
カワサキ プレシジョン マシナリ (ユーケー) リミテッド
液圧回転機械
今日
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
27日前
株式会社不二越
ロボット
19日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
2日前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
株式会社アイエイアイ
グリッパー
8日前
住友重機械工業株式会社
ロボット
13日前
庄内機械株式会社
釘打装置
6日前
川崎重工業株式会社
制動システム
19日前
株式会社イノウ
給油口キャップ用開閉具
20日前
株式会社不二越
垂直多関節ロボット
20日前
オークラ輸送機株式会社
ハンド装置
1日前
芝浦機械株式会社
双腕ロボット
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ