TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072241
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182851
出願日
2023-10-24
発明の名称
手術支援システム、手術装置および手術支援システムの制御方法
出願人
川崎重工業株式会社
,
株式会社メディカロイド
代理人
個人
主分類
A61B
34/35 20160101AFI20250430BHJP(医学または獣医学;衛生学)
要約
【課題】ロボットアームの姿勢によって手術装置が転倒することを未然に防止することが可能な手術支援システムを提供する。
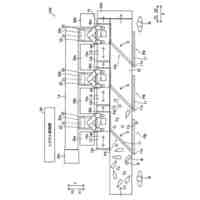
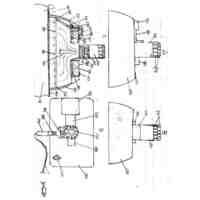
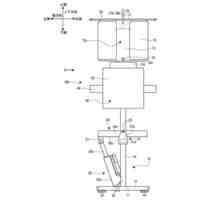
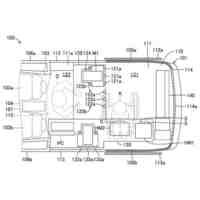
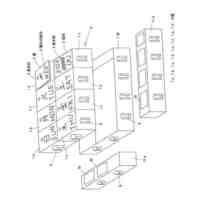
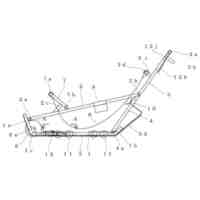
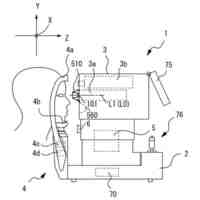
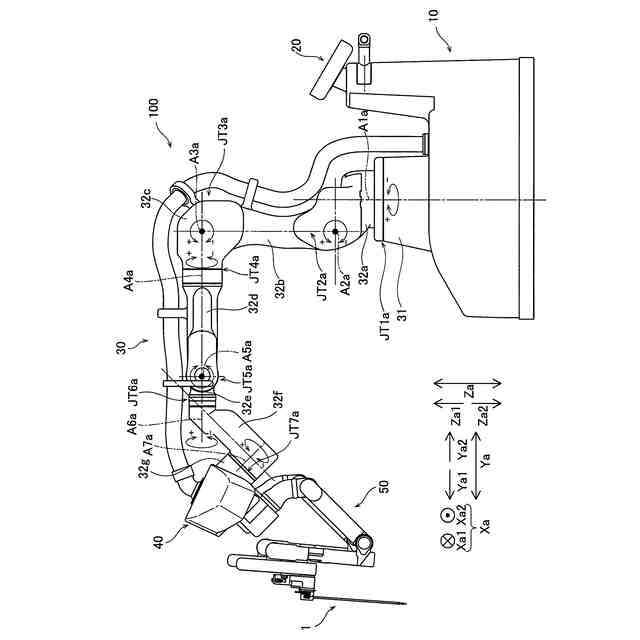
【解決手段】手術支援システム500は、手術器具1を移動させるロボットアーム50と、ロボットアーム50の基端部を支持するアームベース40と、アームベース40を移動させるポジショナ30と、を含む手術支援ロボット100と、アームベース40またはポジショナ30に設定された監視点POが監視領域AR内に存在するか否かを監視し、ポジショナ30の姿勢に基づいて、監視領域ARを変更する監視制御装置360と、を備える。
【選択図】図22
特許請求の範囲
【請求項1】
医療器具を移動させる第1ロボットアームと、前記第1ロボットアームの基端部を支持するアームベースと、前記アームベースを移動させる第2ロボットアームと、を含む手術装置と、
前記アームベースまたは前記第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視し、前記第2ロボットアームの姿勢に基づいて、前記監視領域を変更する監視制御装置と、を備える、手術支援システム。
続きを表示(約 910 文字)
【請求項2】
前記監視制御装置は、前記第2ロボットアームの姿勢に基づいて、前記監視領域を拡大するかまたはずらす、請求項1に記載の手術支援システム。
【請求項3】
前記監視制御装置は、前記第2ロボットアームの姿勢に基づく前記アームベースの鉛直周りの旋回角度に基づいて、前記監視領域を拡大するかまたはずらす、請求項2に記載の手術支援システム。
【請求項4】
前記監視制御装置は、前記アームベースの鉛直周りの旋回角度が第1しきい値よりも大きい場合、前記監視領域を拡大しないかまたはずらさず、前記アームベースの鉛直周りの旋回角度が第1しきい値以下の場合、前記監視領域を拡大するかまたはずらす、請求項3に記載の手術支援システム。
【請求項5】
前記第2ロボットアームは、複数の関節を含み、
前記監視制御装置は、前記複数の関節のうち前記アームベースに接続された先端側の関節の回転に対応する方向に、前記監視領域を拡大するかまたはずらす、請求項2に記載の手術支援システム。
【請求項6】
前記監視制御装置は、前記先端側の関節が一方側に回転した場合、前記監視領域を一方側に拡大するかまたはずらし、前記先端側の関節が他方側に回転した場合、前記監視領域を他方側に拡大するかまたはずらす、請求項5に記載の手術支援システム。
【請求項7】
前記監視制御装置は、前記第2ロボットアームの姿勢に基づく前記アームベースの水平に対する傾斜角度が第2しきい値以上の場合、前記監視点が前記監視領域外に存在すると判断する、請求項1に記載の手術支援システム。
【請求項8】
前記第1ロボットアームを操作するための第1操作装置をさらに備える、請求項1に記載の手術支援システム。
【請求項9】
前記第2ロボットアームを操作するための第2操作装置をさらに備える、請求項1に記載の手術支援システム。
【請求項10】
前記監視領域は、立体的な領域である、請求項1に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システム、手術装置および手術支援システムの制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、手術支援システムが知られている。たとえば、特許文献1には、手術装置を備える手術支援システムが開示されている。手術装置は、ロボット器具を支持するロボットアームと、ロボットアームを支持する湾曲サポートと、湾曲サポートを支持するアーム状部材と、アーム状部材を支持して複数の車輪を有するベースユニットと、を備えている。アーム状部材は、複数の回転の自由度を有しており、姿勢を変更することが可能である。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2014/0249546号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、特許文献1に記載された手術支援システムでは、アーム状部材の姿勢を変更することが可能であるため、アーム状部材の姿勢によっては、バランスを維持できずに手術装置が転倒するおそれがある。このため、アーム状部材の姿勢によって手術装置が転倒することを未然に防止することが望まれている。
【0005】
この開示は、ロボットアームの姿勢によって手術装置が転倒することを未然に防止することが可能な手術支援システム、手術装置および手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示の第1の局面による手術支援システムは、医療器具を移動させる第1ロボットアームと、第1ロボットアームの基端部を支持するアームベースと、アームベースを移動させる第2ロボットアームと、を含む手術装置と、アームベースまたは第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視し、第2ロボットアームの姿勢に基づいて、監視領域を変更する監視制御装置と、を備える。
【0007】
本開示の第1の局面による手術支援システムでは、アームベースまたは第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視することにより、バランスを維持できる範囲で第2ロボットアームの姿勢を取ることができる。その結果、第2ロボットアームの姿勢によって手術装置が転倒することを未然に防止することができる。また、第2ロボットアームの姿勢に基づいて、監視領域を変更するため、監視領域を変更しない場合に比べて、第2ロボットアームがより多くの姿勢を取ることができる。その結果、第2ロボットアームの姿勢によって手術装置が転倒することを未然に防止しつつ、第2ロボットアームにより多くの姿勢を取らせることができる。
【0008】
本開示の第2の局面による手術装置は、医療器具を移動させる第1ロボットアームと、第1ロボットアームの基端部を支持するアームベースと、アームベースを移動させる第2ロボットアームと、アームベースまたは第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視し、第2ロボットアームの姿勢に基づいて、監視領域を変更する監視制御部と、を備える。
【0009】
本開示の第2の局面による手術装置では、上記のように、アームベースまたは第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視することにより、バランスを維持できる範囲で第2ロボットアームの姿勢を取ることができる。その結果、第2ロボットアームの姿勢によって手術装置が転倒することを未然に防止することが可能な手術装置を提供できる。また、第2ロボットアームの姿勢に基づいて、監視領域を変更するため、監視領域を変更しない場合に比べて、第2ロボットアームがより多くの姿勢を取ることができる。その結果、第2ロボットアームの姿勢によって手術装置が転倒することを未然に防止しつつ、第2ロボットアームにより多くの姿勢を取らせることができる。
【0010】
本開示の第3の局面による手術支援システムの制御方法は、医療器具を移動させる第1ロボットアームと、第1ロボットアームの基端部を支持するアームベースと、アームベースを移動させる第2ロボットアームと、を含む手術装置を備える手術支援システムの制御方法であって、アームベースまたは第2ロボットアームに設定された監視点が監視領域内に存在するか否かを監視することと、第2ロボットアームの姿勢に基づいて、監視領域を変更することと、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
廃棄物処理システム
今日
個人
健康器具
3か月前
個人
歯茎みが品
4か月前
個人
鼾防止用具
3か月前
個人
洗井間専家。
2か月前
個人
塗り薬塗り具
5か月前
個人
マッサージ機
3か月前
個人
白内障治療法
2か月前
個人
脈波測定方法
3か月前
個人
脈波測定方法
3か月前
個人
導電香
4か月前
個人
クリップ
4か月前
個人
収納容器
5か月前
個人
健康器具
5か月前
個人
ホバーアイロン
1か月前
個人
矯正椅子
7日前
個人
片足歩行支援具
4か月前
個人
口内洗浄具
3か月前
個人
歯の保護用シール
7日前
三生医薬株式会社
錠剤
2か月前
個人
シャンプー
1か月前
個人
車椅子持ち上げ器
2か月前
個人
眼科診療車
4か月前
株式会社 MTG
浴用剤
4か月前
株式会社八光
剥離吸引管
2日前
株式会社コーセー
美爪料
4か月前
個人
服薬支援装置
2か月前
株式会社結心
手袋
3か月前
株式会社コーセー
化粧料
4か月前
個人
除菌システム
4か月前
個人
避難困難者救出台車
4か月前
株式会社コロナ
サウナ装置
1か月前
株式会社MIC
陰茎補助具
5か月前
個人
尿バッグカバー
4か月前
株式会社ニデック
眼科装置
4か月前
株式会社ファンケル
化粧料
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ