TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025070327
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2023180560
出願日
2023-10-19
発明の名称
基板搬送ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250424BHJP(基本的電気素子)
要約
【課題】基板載置場所の教示位置の補正に伴う部品点数の増加や装置構成の複雑化を抑制することが可能な基板搬送ロボットシステムを提供する。
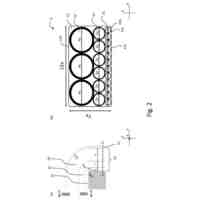
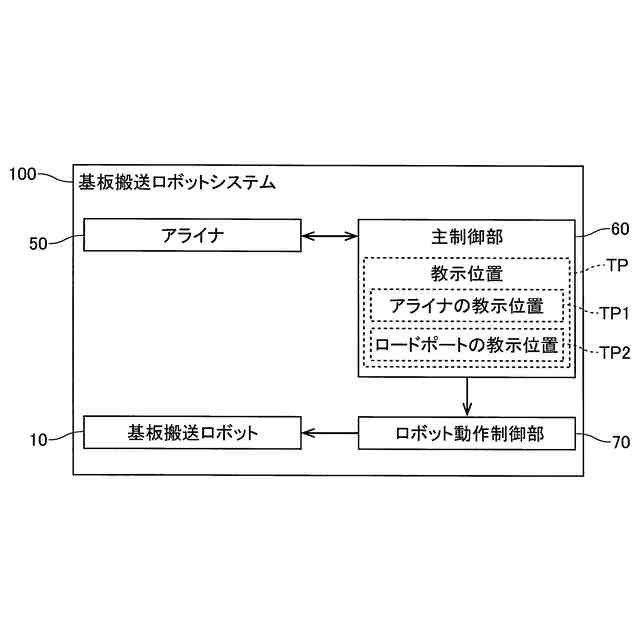
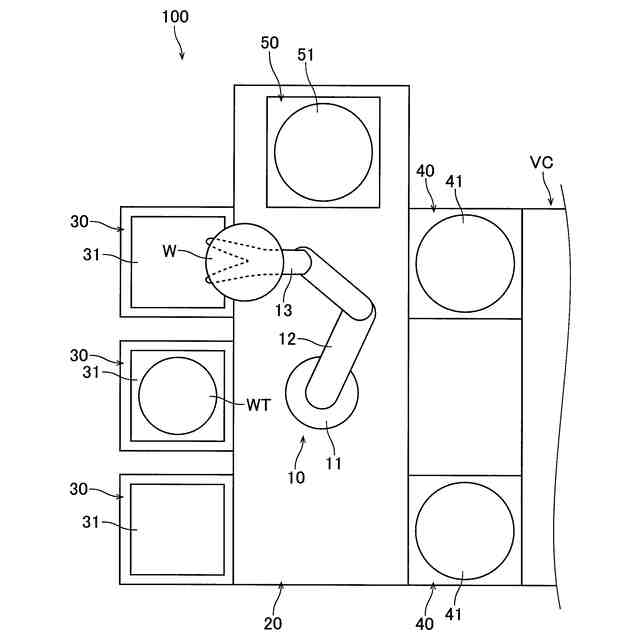
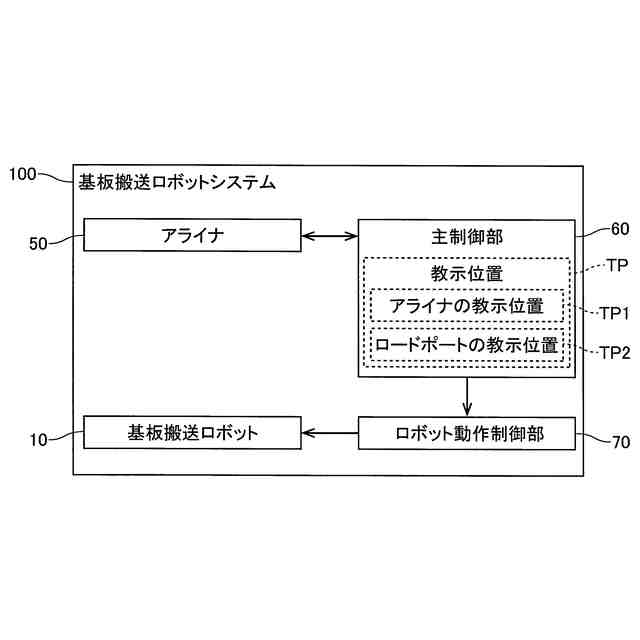
【解決手段】この基板搬送ロボットシステム100は、基板搬送室20に基板搬送ロボット10とは別個に設けられハンド13に保持される基板Wまたは基板型治具WTの位置を検出するためのアライナ50と、基板搬送ロボット10によりアライナ50およびロードポート30に載置された基板Wのアライナ50による検出位置に基づいて、アライナ50およびロードポート30の教示位置TPを補正する主制御部60と、を備える。
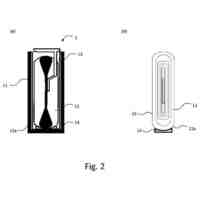
【選択図】図2
特許請求の範囲
【請求項1】
基板を保持するハンドを含む基板搬送ロボットと、
教示位置に基づいて前記基板搬送ロボットの動作を制御するロボット動作制御部と、
前記基板搬送ロボットが配置され前記基板搬送ロボットによる前記基板の搬送が行われる基板搬送室と、
前記基板搬送室に前記基板搬送ロボットとは別個に設けられ前記ハンドに保持される前記基板または基板型治具の位置を検出するための位置検出装置と、
前記基板搬送ロボットにより基板載置場所に載置された前記基板または前記基板型治具の前記位置検出装置による検出位置、または、前記基板搬送ロボットにより前記基板載置場所から保持した前記基板または前記基板型治具の前記位置検出装置による検出位置に基づいて、前記基板載置場所の前記教示位置を補正する教示位置補正制御部と、を備える、基板搬送ロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記位置検出装置は、前記基板または前記基板型治具のアライメントおよび偏心の補正の少なくとも一方を行うための前記基板載置場所としてのアライナを含み、
前記基板が収容される前記基板載置場所としての複数の収容室を備え、
前記教示位置補正制御部は、前記基板搬送ロボットにより前記アライナに載置された前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置、および、前記複数の収容室の各々の前記教示位置のうちの少なくとも一方を補正する、請求項1に記載の基板搬送ロボットシステム。
【請求項3】
前記教示位置補正制御部は、前記基板搬送ロボットにより前記アライナに載置された前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置、および、前記複数の収容室の各々の前記教示位置の両方を補正する、請求項2に記載の基板搬送ロボットシステム。
【請求項4】
前記教示位置補正制御部は、前記基板搬送ロボットにより前記アライナに載置された前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置を補正した後、補正された前記アライナの前記教示位置に基づいて、前記複数の収容室の各々の前記教示位置を補正する、請求項3に記載の基板搬送ロボットシステム。
【請求項5】
前記教示位置補正制御部は、
前記基板または前記基板型治具が前記ハンドにおける予め設定された設定位置に保持されている場合に、前記アライナにより偏心の補正が行われた後の前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置を補正し、
前記基板または前記基板型治具が前記ハンドにおける予め設定された設定位置に保持されていない場合に、前記アライナにより偏心の補正が行われるとともに、前記ハンドによるアクセス方向を変更して前記アライナに載置された後の前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置を補正する、請求項2に記載の基板搬送ロボットシステム。
【請求項6】
前記位置検出装置は、前記基板または前記基板型治具を撮像するためのカメラを含み、
前記教示位置補正制御部は、前記基板または前記基板型治具が前記ハンドにおける予め設定された設定位置に保持されていない場合に、前記カメラにより検出された前記基板または前記基板型治具と前記ハンドとの相対位置に基づいて、前記アライナの前記教示位置を補正する、請求項5に記載の基板搬送ロボットシステム。
【請求項7】
前記ハンドが前記基板または前記基板型治具を掴むことにより強制的に予め設定された設定位置に保持可能なエッジグリップ型であるものの前記基板または前記基板型治具を掴まずに保持されていることにより、前記基板または前記基板型治具が前記ハンドにおける予め設定された設定位置に保持されていない、請求項5に記載の基板搬送ロボットシステム。
【請求項8】
前記教示位置補正制御部は、前記基板搬送ロボットにより搬送される際に前記ハンドに対する前記基板または前記基板型治具の位置が保持され、かつ、前記基板搬送ロボットにより前記アライナに載置された前記基板または前記基板型治具の前記アライナによる検出位置に基づいて、前記アライナの前記教示位置を補正する、請求項2に記載の基板搬送ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットシステムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、教示位置に基づいて基板搬送ロボットの動作を制御する制御部を備える基板搬送ロボットシステムが知られている。たとえば、特許文献1には、教示位置にエンドエフェクタが配置されるように動作指示を搬送ロボットに出力する制御部を備える基板搬送ロボットシステムが開示されている。特許文献1の基板搬送ロボットシステムでは、大気搬送ロボットとロードポートとアライナとの位置合わせを行う際に、エンドエフェクタおよび搬送対象物の少なくとも一方に設けられたセンサおよびカメラの少なくとも一方が用いられている。
【先行技術文献】
【特許文献】
【0003】
特開2022-132087号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されている基板搬送ロボットシステムでは、大気搬送ロボットとロードポートとアライナとの位置合わせを行うために、エンドエフェクタおよび搬送対象物の少なくとも一方にセンサおよびカメラの少なくとも一方を設ける必要がある。すなわち、ロードポート、アライナ等の基板載置場所の教示位置を補正するために、エンドエフェクタおよび搬送対象物の少なくとも一方にセンサおよびカメラの少なくとも一方を別途設ける必要があるので、部品点数が増加してしまうとともに装置構成が複雑化してしまう。このため、基板載置場所の教示位置の補正に伴う部品点数の増加や装置構成の複雑化を抑制することが可能な基板搬送ロボットシステムが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板載置場所の教示位置の補正に伴う部品点数の増加や装置構成の複雑化を抑制することが可能な基板搬送ロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この開示の一の局面による基板搬送ロボットシステムは、基板を保持するハンドを含む基板搬送ロボットと、教示位置に基づいて基板搬送ロボットの動作を制御するロボット動作制御部と、基板搬送ロボットが配置され基板搬送ロボットによる基板の搬送が行われる基板搬送室と、基板搬送室に基板搬送ロボットとは別個に設けられハンドに保持される基板または基板型治具の位置を検出するための位置検出装置と、基板搬送ロボットにより基板載置場所に載置された基板または基板型治具の位置検出装置による検出位置、または、基板搬送ロボットにより基板載置場所から保持した基板または基板型治具の位置検出装置による検出位置に基づいて、基板載置場所の教示位置を補正する教示位置補正制御部と、を備える。
【0007】
この開示の一の局面による基板搬送ロボットシステムは、上記のように、基板搬送室に基板搬送ロボットとは別個に設けられハンドに保持される基板または基板型治具の位置を検出する位置検出装置と、基板搬送ロボットにより基板載置場所に載置された基板または基板型治具の位置検出装置による検出位置、または、基板搬送ロボットにより基板載置場所から保持した基板または基板型治具の位置検出装置による検出位置に基づいて、基板載置場所の教示位置を補正する教示位置補正制御部と、を備える。これにより、位置検出装置により検出された基板または基板型治具の検出位置に基づいて、基板載置場所の教示位置を補正することができる。なお、基板搬送ロボットシステムは、基板搬送室において基板または基板型治具の位置を検出する必要があるため、ハンドに保持される基板または基板型治具の位置を検出するための位置検出装置を備えることが一般的である。したがって、基板載置場所の教示位置を補正するために、ハンド、基板および基板型治具の少なくともいずれかに、センサおよびカメラの少なくとも一方を別途設ける必要がない。その結果、基板載置場所の教示位置の補正に伴う部品点数の増加や装置構成の複雑化を抑制することができる。
【発明の効果】
【0008】
本開示によれば、上記のように、基板載置場所の教示位置の補正に伴う部品点数の増加や装置構成の複雑化を抑制することが可能な基板搬送ロボットシステムを提供することができる。
【図面の簡単な説明】
【0009】
本開示の一実施形態による基板搬送ロボットシステムを示した平面図である。
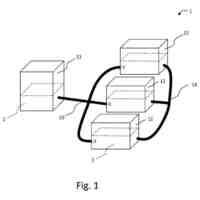
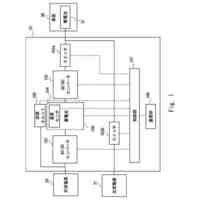
本開示の一実施形態による基板搬送ロボットシステムの制御系の構成を示したブロック図である。
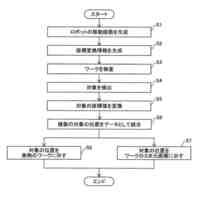
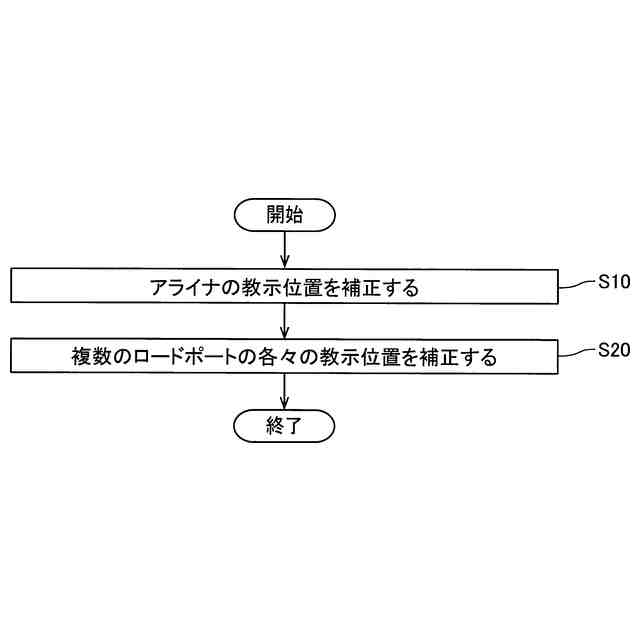
本開示の一実施形態による基板搬送ロボットシステムにおける教示位置の補正のフロー図である。
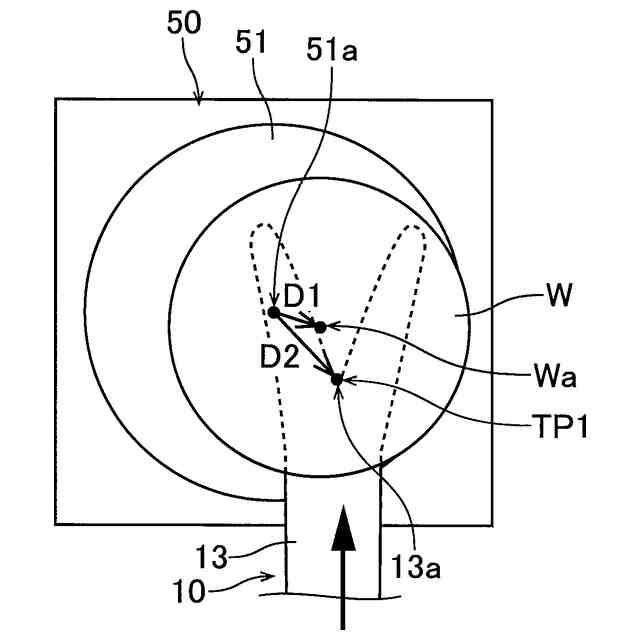
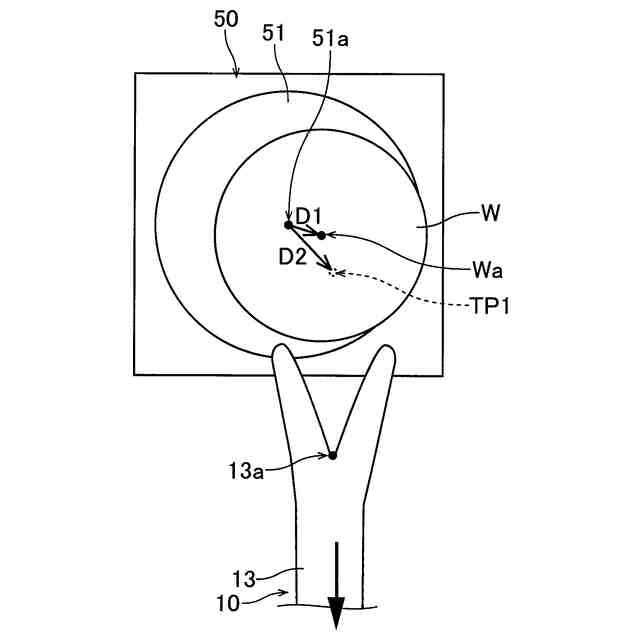
アライナの教示位置を補正する際に、基板をアライナに最初に載置する様子を示した平面図である。
アライナの教示位置を補正する際に、基板をアライナに最初に載置した後、ハンドをアライナから退避させる様子を示した平面図である。
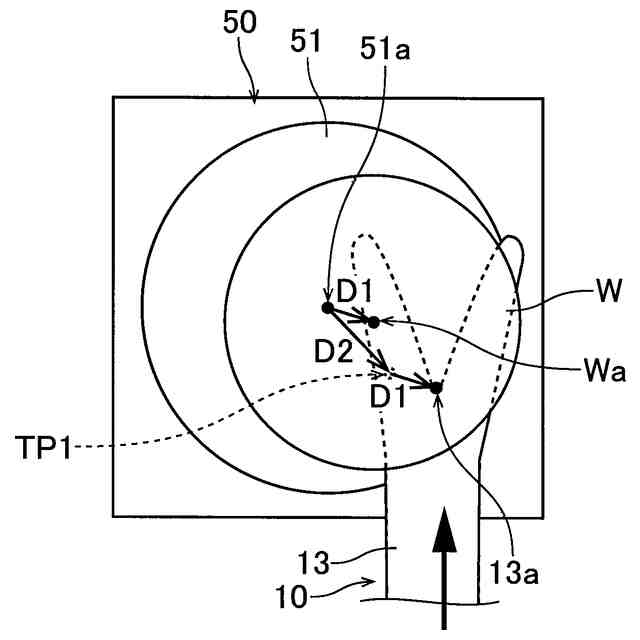
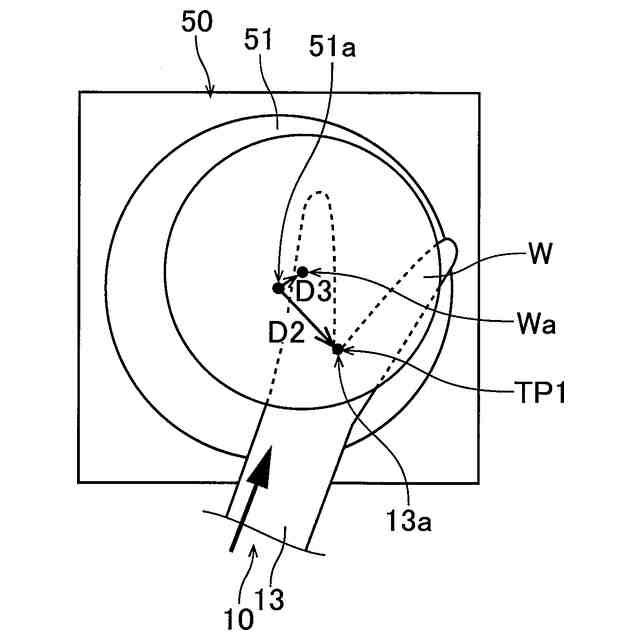
アライナの教示位置を補正する際に、基板とアライナとの偏心分だけハンドをずらして基板を取りに行く様子を示した平面図である。
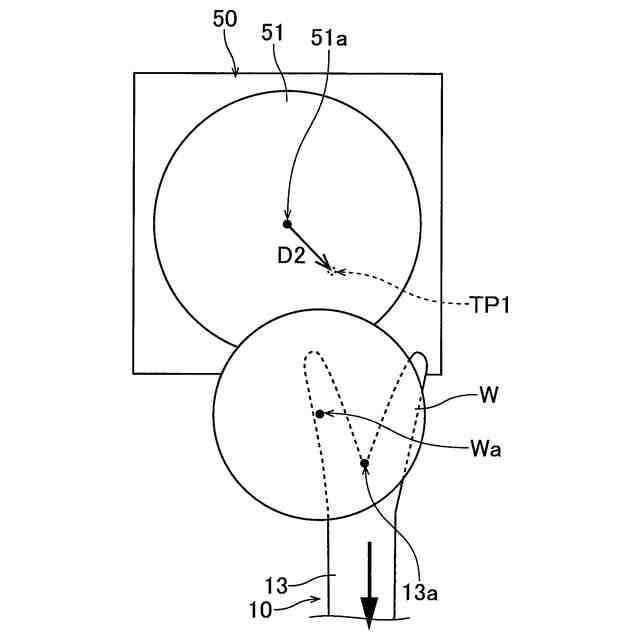
アライナの教示位置を補正する際に、基板とアライナとの偏心分だけハンドをずらして基板を取った後、ハンドをアライナから退避させる様子を示した平面図である。
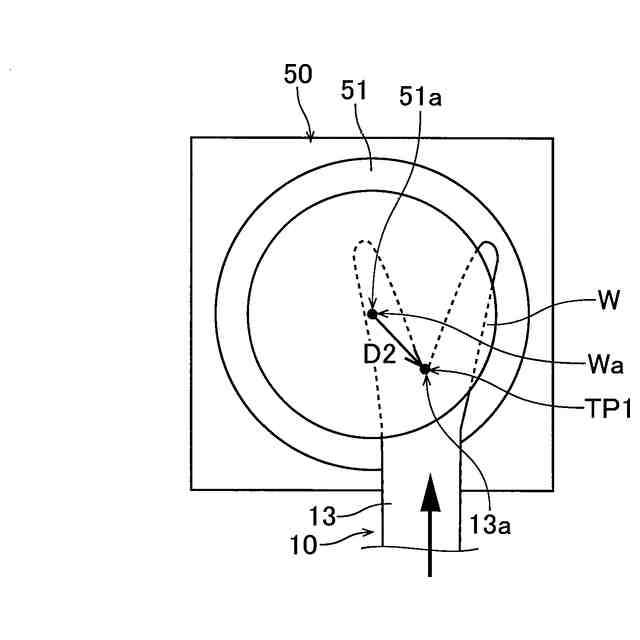
アライナの教示位置を補正する際に、基板とアライナとの偏心分だけハンドをずらして基板を取ってハンドをアライナから退避させた後、ハンドをずらした分を基に戻して基板をアライナに載置した様子を示した平面図である。
アライナの教示位置を補正する際に、基板とアライナとの偏心分だけハンドをずらして基板を取ってハンドをアライナから退避させた後、ハンドをずらした分を基に戻すとともにアライナへのアクセス方向を変更して基板をアライナに載置した様子を示した平面図である。
アライナの教示位置を補正した後、基板をアライナに最初に載置する様子を示した平面図である。
ロードポートの教示位置を補正する際に、基板をアライナに最初に載置する様子を示した平面図である。
ロードポートの教示位置を補正する際に、基板とアライナとの偏心分だけハンドをずらして基板を取ってハンドをアライナから退避させた後、ハンドをずらした分を基に戻して基板をアライナに載置した様子を示した平面図である。
本開示の第1変形例による基板搬送ロボットシステムの制御系の構成を示したブロック図である。
本開示の第2変形例による基板搬送ロボットシステムを示した平面図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
エンドエフェクタ
5日前
川崎重工業株式会社
検査システムおよび検査方法
2日前
川崎重工業株式会社
検査システムおよび検査方法
8日前
甲神電機株式会社
変流器
26日前
APB株式会社
二次電池
20日前
株式会社東光高岳
変圧器
13日前
株式会社東光高岳
変圧器
13日前
株式会社コロナ
タッチ式操作装置
2日前
ローム株式会社
半導体装置
22日前
ローム株式会社
チップ部品
16日前
太陽誘電株式会社
全固体電池
21日前
トヨタ自動車株式会社
二次電池
21日前
トヨタ自動車株式会社
二次電池
5日前
CKD株式会社
倣い装置
9日前
トヨタ自動車株式会社
集合導線
22日前
株式会社不二越
ソレノイド
8日前
株式会社ダイヘン
搬送装置
5日前
APB株式会社
二次電池セルの製造方法
20日前
株式会社プロテリアル
シート状磁性部材
27日前
ローム株式会社
半導体装置
7日前
株式会社ダイヘン
ヒューズ
2日前
富士電機株式会社
半導体装置
9日前
ニチコン株式会社
コンデンサ
15日前
SMK株式会社
コネクタの取付構造
9日前
トヨタ自動車株式会社
電池昇温装置
9日前
新電元工業株式会社
磁性部品
16日前
新電元工業株式会社
磁性部品
16日前
CKD株式会社
傾き調整装置
9日前
日本圧着端子製造株式会社
コネクタ
14日前
三菱電機株式会社
半導体装置
21日前
トヨタ自動車株式会社
充電システム
22日前
株式会社村田製作所
コイル部品
9日前
住友電気工業株式会社
ペレット
23日前
FDK株式会社
放熱構造
13日前
TDK株式会社
電子部品
12日前
イビデン株式会社
電子部品搭載用基板
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ