TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081149
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194726
出願日
2023-11-15
発明の名称
検査システムおよび検査方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
G01N
21/88 20060101AFI20250520BHJP(測定;試験)
要約
【課題】複数のロボットによりワークを検査した場合でも、ワークの対象のデータの取り扱いを容易にすることが可能な検査システムを提供する。
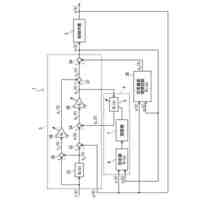
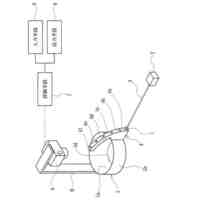
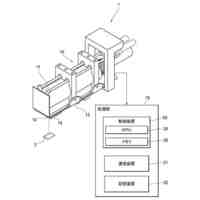
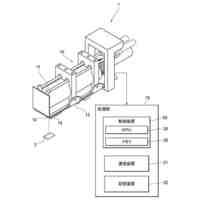
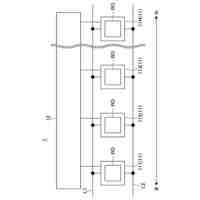
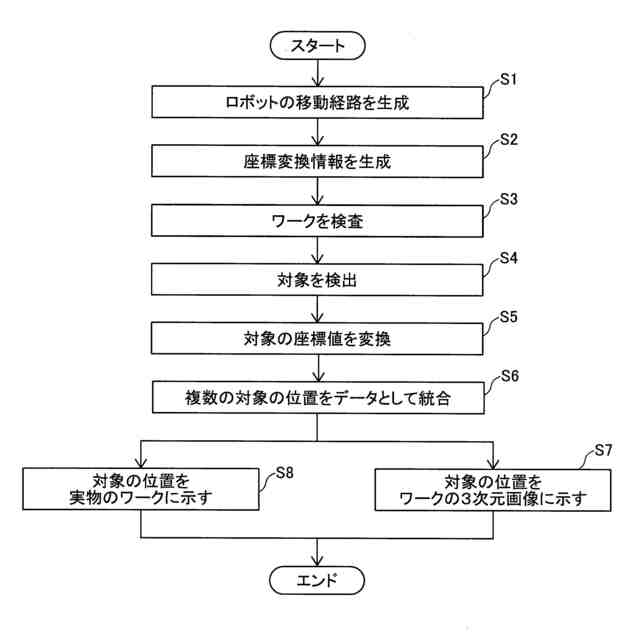
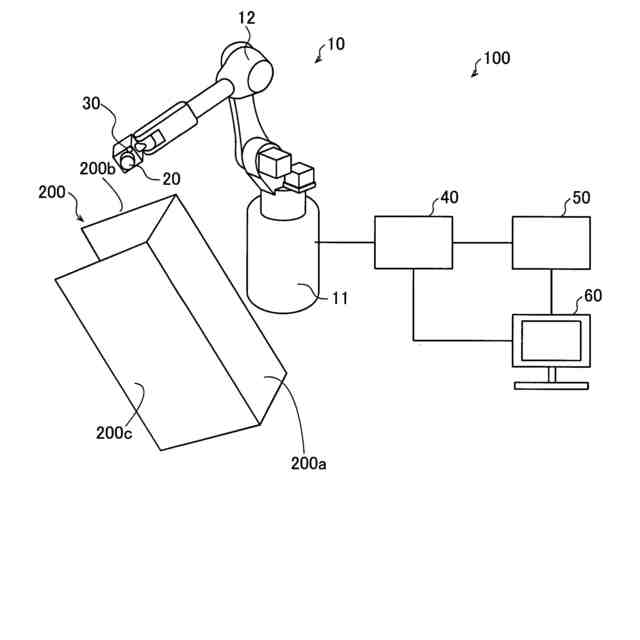
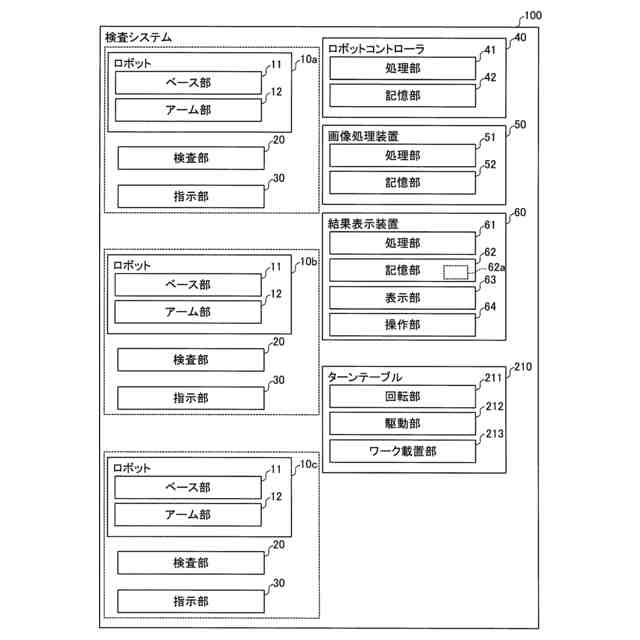
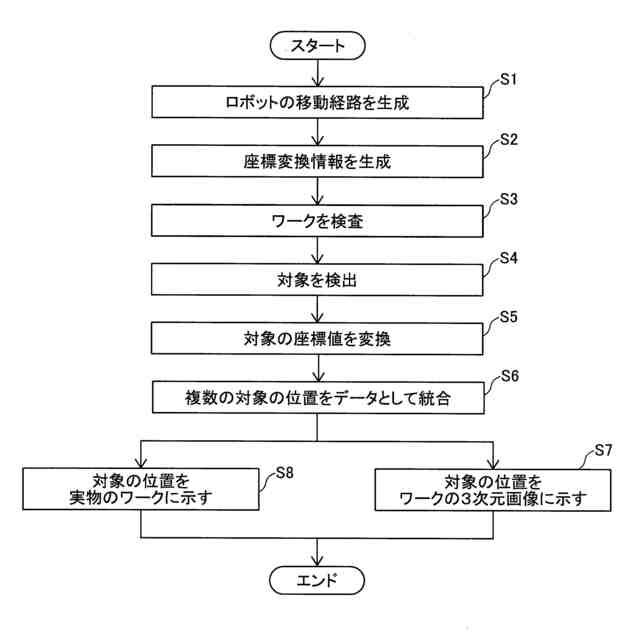
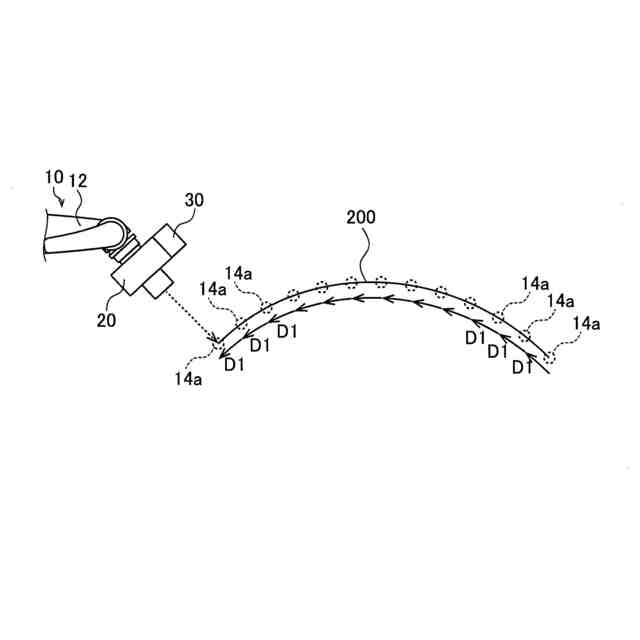
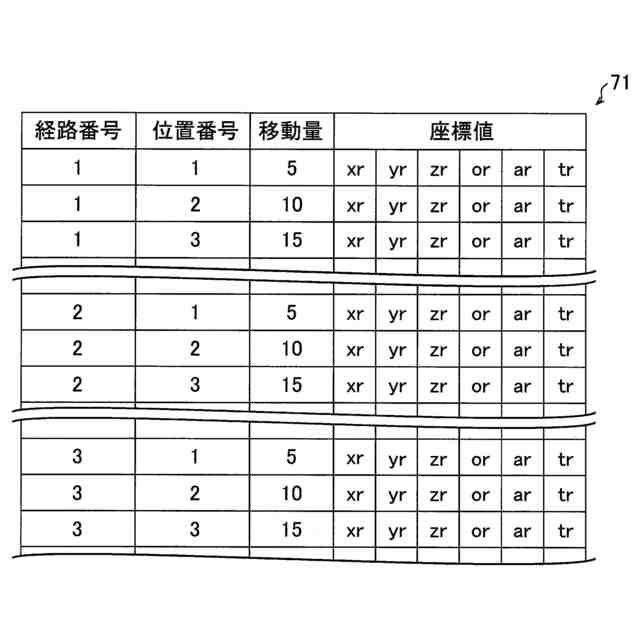
【解決手段】この検査システム100は、複数のロボット10と、複数のロボット10の各々に配置され、ワーク200を検査する検査部20と、ワーク200に対して複数のロボット10の各々に配置された検査部20を相対的に移動させてワーク200を検査する処理を行う処理部41と、各々の検査部20から複数のワーク200の検査画像21を取得する処理と複数の検査画像21内のワーク200の対象を検出する処理とを行う処理部51と、複数の検査画像21から検出した対象201の位置をデータ62aとして統合する処理を行う処理部61と、を備える
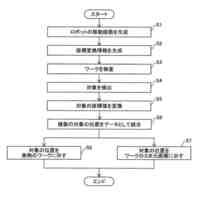
【選択図】図4
特許請求の範囲
【請求項1】
複数のロボットと、
前記複数のロボットの各々に配置され、ワークを検査する検査部と、
前記ワークに対して前記複数のロボットの各々に配置された前記検査部を相対的に移動させて前記ワークを検査することにより、各々の前記検査部から複数の前記ワークの検査画像を取得する処理と、
複数の前記検査画像内の前記ワークの対象を検出する処理と、
複数の前記検査画像から検出した前記対象の位置をデータとして統合する処理と、を行う、処理部と、を備える、検査システム。
続きを表示(約 1,100 文字)
【請求項2】
前記対象は、前記ワークの欠陥を含む、請求項1に記載の検査システム。
【請求項3】
前記複数のロボットの各々に配置された前記検査部の前記ワークに対する検査範囲は、互いにオーバーラップしている、請求項1に記載の検査システム。
【請求項4】
前記処理部は、複数の前記検査画像から検出した前記対象の位置が同じである場合、位置が同じである前記対象を同一の対象として取り扱う処理を行う、請求項1に記載の検査システム。
【請求項5】
前記複数のロボットは、前記ワークの互いに異なる面を検査する、請求項1に記載の検査システム。
【請求項6】
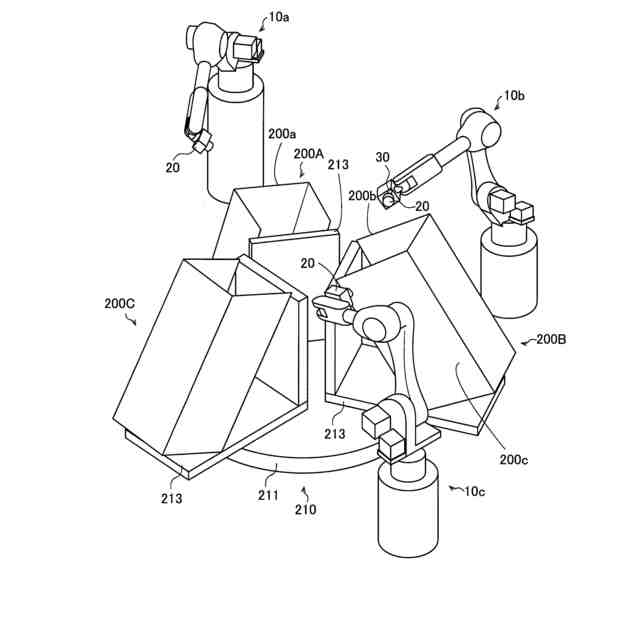
複数の前記ワークが載置され、載置された前記ワークを搬送するワーク搬送装置を備え、
前記複数のロボットのうちの一のロボットは、前記ワーク搬送装置に載置された一のワークの一の面を検査し、
前記複数のロボットのうちの他のロボットは、前記ワーク搬送装置に載置された他のワークの前記一の面とは異なる他の面を検査する、請求項5に記載の検査システム。
【請求項7】
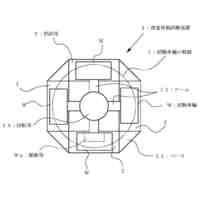
前記ワーク搬送装置は、載置された前記ワークを回転させるターンテーブルを含む、請求項6に記載の検査システム。
【請求項8】
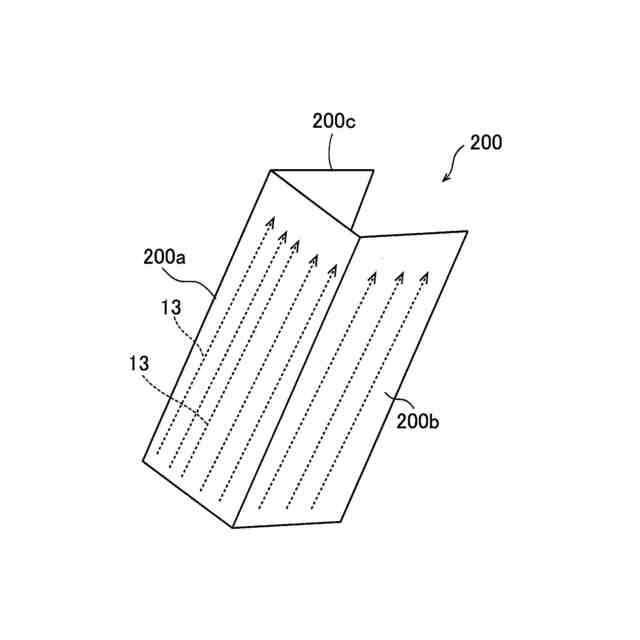
前記ターンテーブルに載置された前記ワークは、
第1の面と、
前記第1の面に交差する第2の面と、
前記第1の面に交差するとともに前記第2の面に対向する第3の面と、を含み、
前記複数のロボットは、
前記第1の面を検査する第1ロボットと、
前記第2の面を検査する第2ロボットと、
前記第3の面を検査する第3ロボットと、を含む、請求項7に記載の検査システム。
【請求項9】
前記処理部は、
前記第1ロボット、前記第2ロボットおよび前記第3ロボットにより前記ワークの検査が終了した後、前記ターンテーブルを回転させる処理を行い、
前記第2ロボットおよび前記第3ロボットは、各々、検査が行われていないワークの前記第2の面および前記第3の面を検査し、
前記第1ロボットは、前記第2ロボットおよび前記第3ロボットによる検査が終了した前記ワークの前記第1の面を検査する、請求項8に記載の検査システム。
【請求項10】
前記処理部は、複数の前記検査画像から検出した前記対象を前記ワークの画像に表示する処理を行う、請求項1に記載の検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、検査システムおよび検査方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、検査システムが知られている。たとえば、特許文献1には、2台のロボットと、2台のロボットに配置された撮像装置と、画像処理装置と、プロッタと、を備える車両塗装面用欠陥マーキング装置が開示されている。この車両塗装面用欠陥マーキング装置では、2台のロボットの一方に配置された撮像装置により車両の上面が撮像され、2台のロボットの他方に配置された撮像装置により車両の側面が撮像される。画像処理装置は、撮像された画像に基づいて、車両の欠陥を検出する。そして、画像処理装置は、車両の上面において検出された欠陥を水平の2次元投影面に投影し、2次元の位置として記憶部に記憶する。また、画像処理装置は、車両の側面において検出された欠陥を垂直の2次元投影面に投影し、2次元の位置として記憶部に記憶する。プロッタは、記憶部に記憶された水平の2次元投影面に投影された欠陥の2次元の位置のデータに基づいて、車両の上面にレーザ光を照射する。また、プロッタは、記憶部に記憶された垂直の2次元投影面に投影された欠陥の2次元の位置のデータに基づいて、車両の側面にレーザ光を照射する。これにより、車両の欠陥位置がレーザ光により指し示される。
【先行技術文献】
【特許文献】
【0003】
特開2004-125407号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載された車両塗装面用欠陥マーキング装置では、車両の上面の欠陥の2次元の位置のデータ、および、車両の側面の欠陥の2次元の位置のデータが、それぞれ、水平の2次元投影面に投影された位置のデータおよび垂直の2次元投影面に投影された位置のデータとして別個に記憶部に記憶されている。このため、記憶部に記憶された車両の欠陥のデータをたとえば他のコンピュータなどから参照する場合、車両の上面の欠陥の2次元の位置のデータと、車両の側面の欠陥の2次元の位置のデータとの各々を参照する必要がある。そのため、ワークの対象としての欠陥のデータの取り扱いが複雑になるという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、複数のロボットによりワークを検査した場合でも、ワークの対象のデータの取り扱いを容易にすることが可能な検査システムおよび検査方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による検査システムは、複数のロボットと、複数のロボットの各々に配置され、ワークを検査する検査部と、ワークに対して複数のロボットの各々に配置された検査部を相対的に移動させてワークを検査することにより、各々の検査部から複数のワークの検査画像を取得する処理と、複数の検査画像内のワークの対象を検出する処理と、複数の検査画像から検出した対象の位置をデータとして統合する処理と、を行う、処理部と、を備える。
【0007】
この開示の第1の局面による検査システムは、上記のように、複数のロボットの各々に配置された検査部から取得された複数の検査画像から検出した対象の位置をデータとして統合する処理を行う処理部を備える。これにより、複数のロボットにより検査されたワークの対象の位置が、データとして統合されているので、たとえば他のコンピュータなどからこの統合されたデータを1度参照するだけで、ワークの全ての対象の位置を参照できる。その結果、複数のロボットによりワークを検査した場合でも、ワークの対象のデータの取り扱いを容易にできる。
【0008】
この開示の第2の局面による検査方法は、ワークに対して複数のロボットの各々に配置された検査部を相対的に移動させてワークを検査することにより、各々の検査部から複数のワークの検査画像を取得することと、複数の検査画像内のワークの対象を検出することと、複数の検査画像から検出した対象の位置をデータとして統合することと、を備える。
【0009】
この開示の第2の局面による検査方法は、上記のように、複数のロボットの各々に配置された検査部から取得された複数の検査画像から検出した対象の位置をデータとして統合することを備える。これにより、複数のロボットにより検査されたワークの対象の位置が、データとして統合されているので、たとえば他のコンピュータなどからこの統合されたデータを1度参照するだけで、ワークの全ての対象の位置を参照できる。その結果、複数のロボットによりワークを検査した場合でも、ワークの対象のデータの取り扱いを容易にすることが可能な検査方法を提供できる。
【発明の効果】
【0010】
本開示の検査システムおよび検査方法は、上記のように、複数のロボットによりワークを検査した場合でも、ワークの対象のデータの取り扱いを容易にできる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
エンドエフェクタ
2日前
川崎重工業株式会社
遠心式ターボ機械
6日前
川崎重工業株式会社
極低温流体用配管システム
5日前
川崎重工業株式会社
検査システムおよび検査方法
5日前
川崎重工業株式会社
適応制御システムおよび適応制御方法
10日前
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
1か月前
日本精機株式会社
表示装置
18日前
日本精機株式会社
アセンブリ
24日前
株式会社エビス
水準器
17日前
個人
準結晶の解析方法
24日前
株式会社豊田自動織機
自動走行体
23日前
株式会社不二越
塵埃噴射装置
12日前
日本碍子株式会社
ガスセンサ
17日前
個人
浸透探傷試験方法
13日前
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
検査装置
1か月前
株式会社東芝
センサ
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
11日前
GEE株式会社
光学特性測定装置
23日前
日本特殊陶業株式会社
ガスセンサ
24日前
株式会社不二越
X線測定装置
18日前
東ソー株式会社
簡易型液体クロマトグラフ
1か月前
学校法人 中央大学
管内径推定装置
3日前
個人
多段電磁加速による高力積衝撃試験機
5日前
株式会社不二越
X線測定装置
18日前
TDK株式会社
アレイセンサ
13日前
株式会社TISM
センサ部材
23日前
リバークル株式会社
荷重移動試験装置
1か月前
TDK株式会社
計測装置
18日前
大和製衡株式会社
表示システム
1か月前
東洋紡株式会社
ヘムタンパク質の安定化方法
6日前
株式会社小糸製作所
物体検知システム
24日前
株式会社ニコン
検出装置
1か月前
TDK株式会社
温度センサ
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ