TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083282
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2024130161
出願日
2024-08-06
発明の名称
エンドエフェクタ
出願人
川崎重工業株式会社
,
川重岐阜エンジニアリング株式会社
代理人
弁理士法人三協国際特許事務所
主分類
B25J
15/00 20060101AFI20250523BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】加工精度の向上に資するエンドエフェクタを提供する。
【解決手段】エンドエフェクタ(1)は、ロボットアームに固定されるベース部材(21)と、ドリルユニット(3)と、弾性接続部材(24)と、を備える。ドリルユニット(3)は、ドリル(31)と、当該ドリル(31)を支持するドリルサポート(32)と、ドリル(31)をドリルサポート(32)に対し進退及び回転させる動力装置(34)と、ドリルサポート(32)からワーク(W)に向けて突出するプレッシャフート(33)と、を含む。弾性接続部材(24)は、複数のゴム板と複数の剛性板とがベース部材(21)とドリルサポート(32)との間にわたって積層された構造を有し、ベース部材(21)とドリルサポート(32)とを互いに接続する。弾性接続部材(24)には、圧縮機構(23)によって圧縮荷重が付与される。
【選択図】図2
特許請求の範囲
【請求項1】
ワークを加工するためにロボットアームに取り付けられるエンドエフェクタであって、
ドリルと、当該ドリルを支持するドリルサポートと、前記ドリルを前記ドリルサポートに対し進退及び回転させる動力装置と、前記ドリルサポートから前記ワークに向けて突出し、前記ドリルによる加工時に前記ワークに接触するプレッシャフートと、を含むドリルユニットと、
前記ロボットアームに固定され、前記ドリルの中心軸と平行なドリル軸方向について前記ドリルサポートから離間したベース部材と、
複数のゴム板と当該ゴム板よりも剛性の高い複数の剛性板とが前記ベース部材と前記ドリルサポートとの間にわたって積層された構造を有し、前記ベース部材と前記ドリルサポートとを互いに接続する弾性接続部材と、
前記弾性接続部材に対し、前記ゴム板及び前記剛性板の積層方向の圧縮荷重を付与する圧縮機構と、を備えた、エンドエフェクタ。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載のエンドエフェクタにおいて、
前記ドリルサポートを挟んで前記ベース部材の反対側に配置される先端側部材をさらに備え、
前記圧縮機構は、前記先端側部材を前記ベース部材に引き寄せる方向の荷重が生じるように前記先端側部材と前記ベース部材とを連結することにより、前記ドリルサポートを介して前記弾性接続部材を圧縮する、エンドエフェクタ。
【請求項3】
請求項2に記載のエンドエフェクタにおいて、
前記弾性接続部材と同様の構造を有し、かつ前記先端側部材と前記ドリルサポートとを互いに接続する先端側弾性接続部材をさらに備えた、エンドエフェクタ。
【請求項4】
請求項3に記載のエンドエフェクタにおいて、
前記弾性接続部材は、互いに離れた3つ以上の第1要素弾性体を含み、
前記先端側弾性接続部材は、互いに離れた3つ以上の第2要素弾性体を含み、
前記各第1要素弾性体の重心と前記各第2要素弾性体の重心とを結んでできる仮想多面体の内部に前記ドリルユニットの重心が含まれるように、前記第1要素弾性体及び前記第2要素弾性体が配置されている、エンドエフェクタ。
【請求項5】
請求項1に記載のエンドエフェクタにおいて、
前記圧縮機構は、前記ドリルサポートを前記ベース部材に引き寄せる方向の荷重が生じるように前記ドリルサポートと前記ベース部材とを連結することにより、前記弾性接続部材を圧縮する、エンドエフェクタ。
【請求項6】
請求項5に記載のエンドエフェクタにおいて、
前記弾性接続部材は、互いに離れた3つ以上の要素弾性体を含み、
前記ドリル軸方向に沿って見たときに、前記各要素弾性体の重心を結んでできる仮想多角形の内部に前記ドリルユニットの重心が含まれるように、前記各要素弾性体が配置されている、エンドエフェクタ。
【請求項7】
請求項5に記載のエンドエフェクタにおいて、
前記弾性接続部材は、前記ゴム板及び前記剛性板が積層された構造を有する、複数の要素弾性体を含み、
複数の前記要素弾性体は、前記ドリル軸方向と直交する方向視において、前記ゴム板及び前記剛性板の積層方向が前記ドリル軸方向と非平行になるように傾斜して配置される、エンドエフェクタ。
【請求項8】
請求項7に記載のエンドエフェクタにおいて、
複数の前記要素弾性体は、当該各要素弾性体の重心を通って前記積層方向に延びる弾性体中心線が前記ロボットアームと反対の先端側ほど前記ドリルの中心軸に近づくように傾斜して配置される、エンドエフェクタ。
【請求項9】
請求項8に記載のエンドエフェクタにおいて、
複数の前記要素弾性体は、それぞれの前記弾性体中心線が、前記ドリルの中心軸を含む直線であるドリル中心線上の一つの交点で交わるように傾斜して配置される、エンドエフェクタ。
【請求項10】
請求項9に記載のエンドエフェクタにおいて、
複数の前記要素弾性体は、前記積層方向に同一の長さを有し、かつ前記各要素弾性体の重心と前記交点との距離が互いに等しくなるように配置される、エンドエフェクタ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ワークを加工するためにロボットアームに取り付けられるエンドエフェクタに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
エンドエフェクタの一例として、下記特許文献1のものが知られている。具体的に、この特許文献1には、ロボットアームの先端部とエンドエフェクタとの間、あるいはエンドエフェクタ自身に、コイルスプリング等の弾性体からなる機械的なコンプライアンス機構を設けることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-231925号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1のように、弾性体からなる機械的なコンプライアンス機構を用いた場合、例えばエンドエフェクタの姿勢によっては、弾性体が望ましくない方向に変形し、エンドエフェクタによる加工精度が低下するおそれがある。
【0005】
本開示は、上記のような事情に鑑みてなされたものであり、加工精度の向上に資するエンドエフェクタを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するためのものとして、本開示の一局面に係るエンドエフェクタは、ワークを加工するためにロボットアームに取り付けられるエンドエフェクタであって、前記ロボットアームに固定されるベース部材と、ドリルと、当該ドリルを支持するドリルサポートと、前記ドリルを前記ドリルサポートに対し進退及び回転させる動力装置と、前記ドリルサポートから前記ワークに向けて突出し、前記ドリルによる加工時に前記ワークに接触するプレッシャフートと、を含むドリルユニットと、複数のゴム板と当該ゴム板よりも剛性の高い複数の剛性板とが前記ドリルの中心軸と平行なドリル軸方向に積層された構造を有し、前記ベース部材と前記ドリルサポートとを互いに接続する弾性接続部材と、前記弾性接続部材に対し前記ドリル軸方向の圧縮荷重を付与する圧縮機構と、を備えたものである。
【発明の効果】
【0007】
本開示によれば、加工精度の向上に資するエンドエフェクタを提供することができる。
【図面の簡単な説明】
【0008】
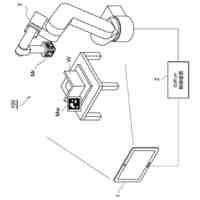
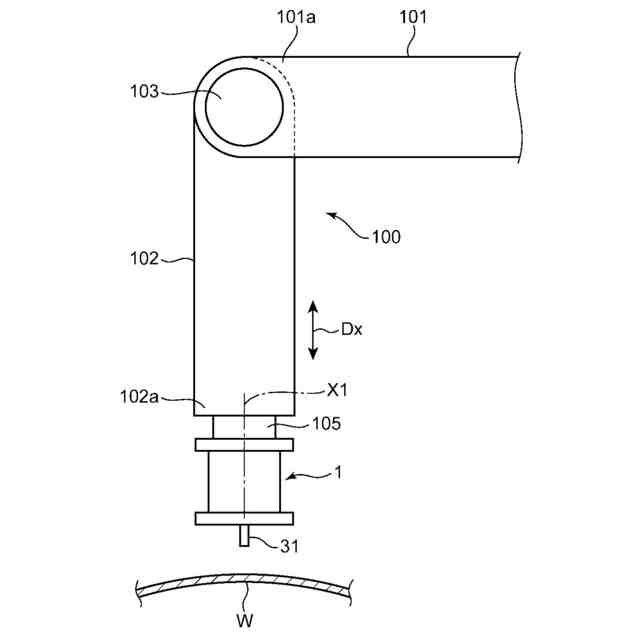
本開示の第1実施形態に係るエンドエフェクタを含む作業ロボットを概略的に示す図である。
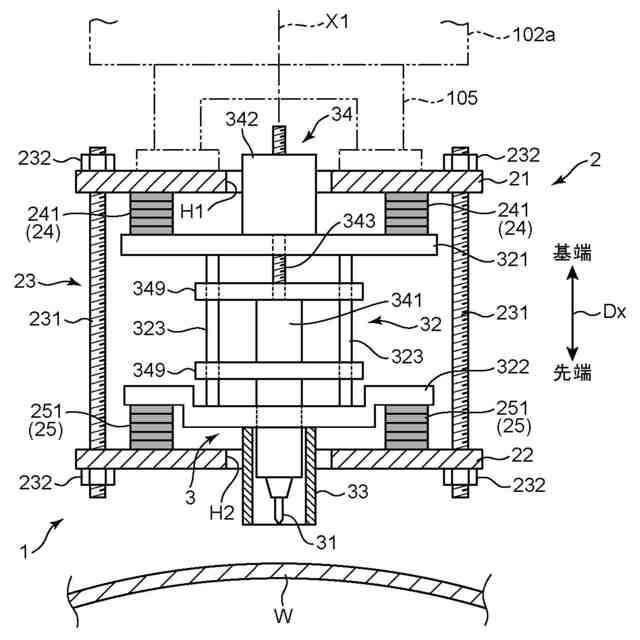
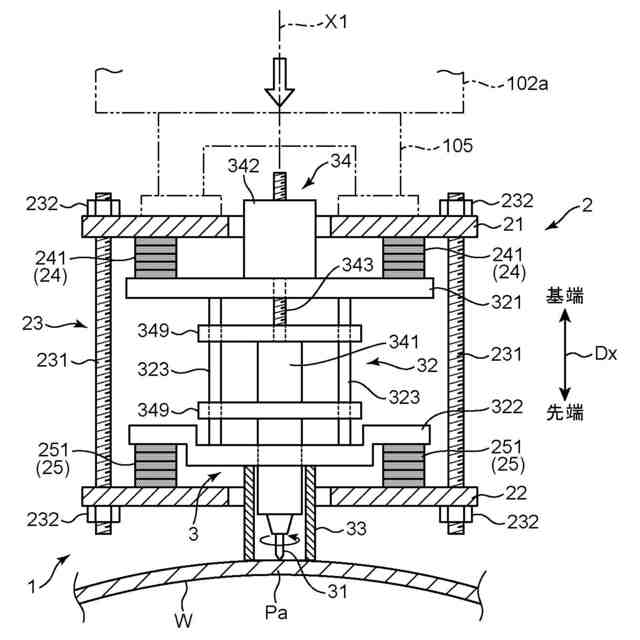
上記エンドエフェクタの詳細構造を示す正面断面図である。
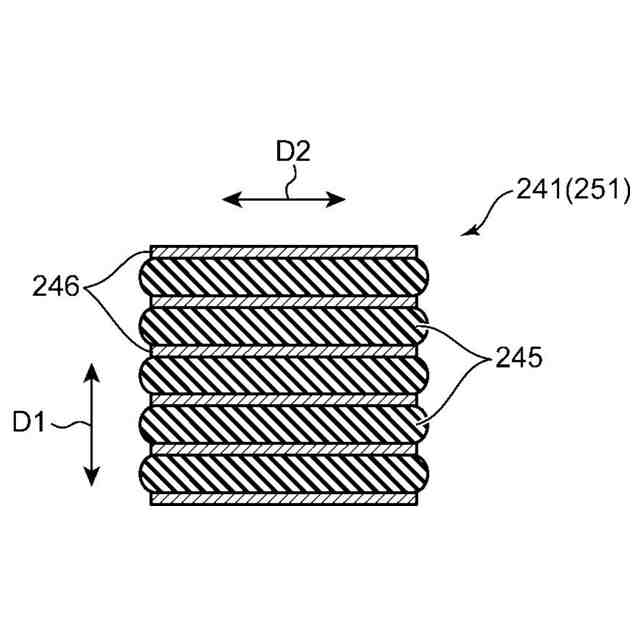
積層ゴムの構造を示す断面図である。
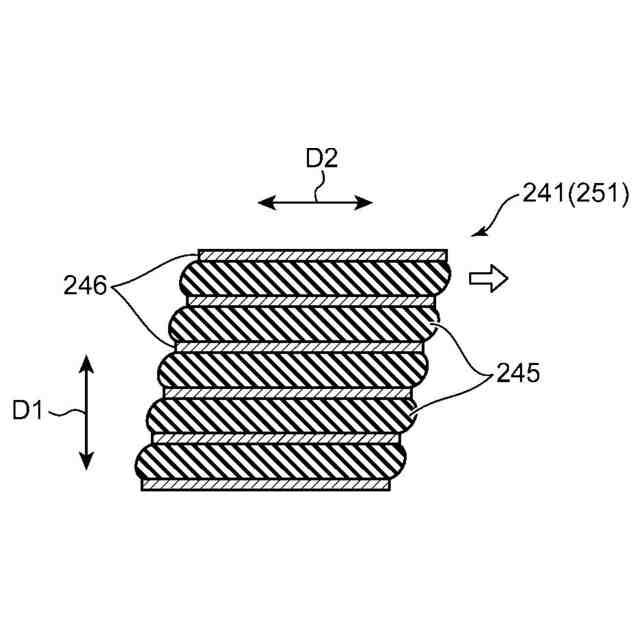
上記積層ゴムが変形した状態を示す断面図である。
複数の上記積層ゴムとドリルユニットの重心との位置関係を示す斜視図である。
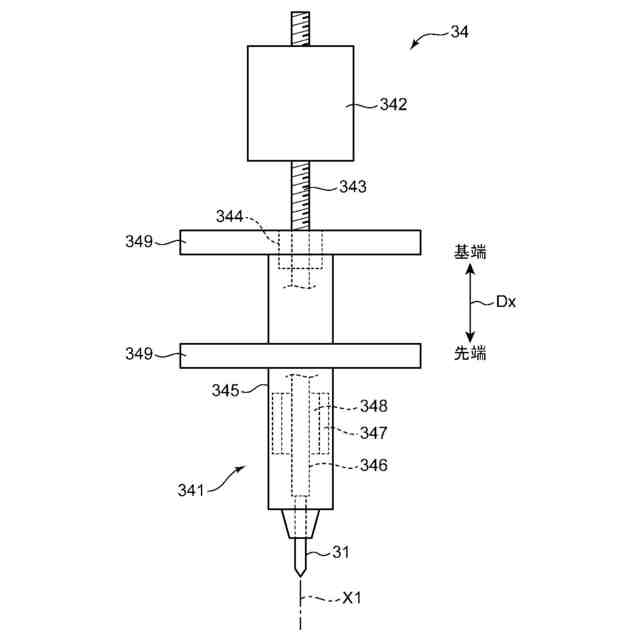
動力装置を拡大して示す正面図である。
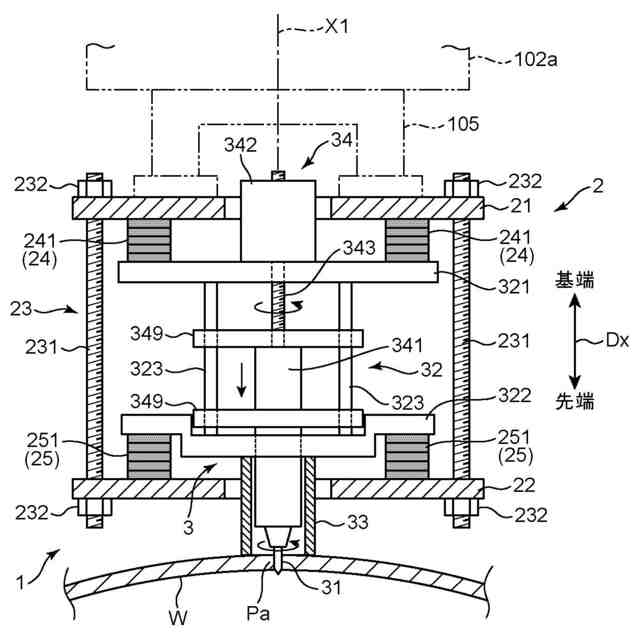
上記エンドエフェクタを用いてワークにドリル加工を施す状況を示す図2相当図である。
ドリルがワークを貫通した状況を示す図2相当図である。
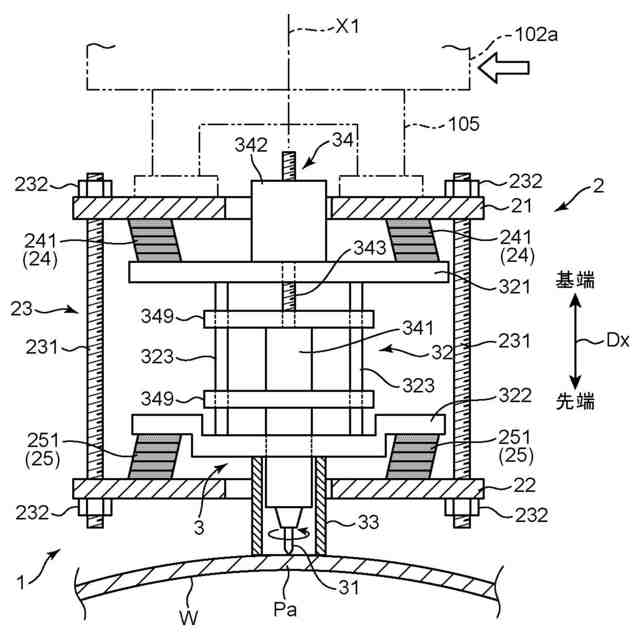
上記積層ゴムがせん断方向に変形した状況を示す図2相当図である。
ドリル軸が鉛直線に対し傾く姿勢でドリル加工を行う状況を示す図1相当図である。
上記第1実施形態の変形例を説明するための図4相当図である。
本開示の第2実施形態に係るエンドエフェクタを示す正面断面図である。
複数の積層ゴムとドリルユニットの重心との位置関係を示す斜視図である。
ドリルがワークを貫通した状況を示す図11相当図である。
本開示の第3実施形態に係るエンドエフェクタを示す正面断面図である。
積層ゴムの構造を示す断面図である。
積層ゴムとドリルユニットとの位置関係を示す図である。
上記エンドエフェクタの作用を説明するための図である。
【発明を実施するための形態】
【0009】
以下、図面に基づいて、本開示のエンドエフェクタの好ましい実施形態について詳細に説明する。本開示のエンドエフェクタは、ワークを加工するためにロボットアームに取り付けられる。ロボットアームは、ワークにおける任意の加工位置にエンドエフェクタがアプローチできるように当該エンドエフェクタを移動可能に支持するものである。ロボットアームは、このような機能を有するものであればその種類を問わないが、例えば多関節ロボットが好適である。
【0010】
(1)第1実施形態
図1は、本開示の第1実施形態に係るエンドエフェクタ1を含む作業ロボットを概略的に示す図である。作業ロボットは、多関節ロボットからなるロボットアーム100と、ロボットアーム100の先端部に取り付けられたエンドエフェクタ1と、を備える。本実施形態において、ロボットアーム100は、第1アーム部101及び第2アーム部102を含む。第2アーム部102は、第1アーム部101の先端部101aに関節103を介して回動可能に連結されている。第1アーム部101は、さらに上流側のアーム部に関節等を介して回動可能に連結されている。エンドエフェクタ1は、第2アーム部102の先端部102aにブラケット105を介して取り付けられている。なお、以下では、第2アーム部102の先端部102aのことをアーム先端部102aという。アーム先端部102aは、第2アーム部102の延設方向であるアーム軸方向Dxの一方側の端部であって、関節103とは反対側の端部である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
トヨタ自動車株式会社
関節機構
3日前
株式会社ダイヘン
移動体
1日前
株式会社不二越
ロボット
29日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
12日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
3日前
庄内機械株式会社
釘打装置
16日前
川崎重工業株式会社
制動システム
29日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
住友重機械工業株式会社
ロボット
23日前
株式会社PILLAR
チューブ保持治具
8日前
株式会社アイエイアイ
グリッパー
18日前
オークラ輸送機株式会社
ハンド装置
11日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社マキタ
電動作業機
4日前
株式会社マキタ
電動作業機
4日前
芝浦機械株式会社
双腕ロボット
22日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社リコー
多関節ロボット
2日前
トヨタ自動車東日本株式会社
搬送治具
16日前
トヨタ自動車株式会社
荷姿影響緩和方法
19日前
株式会社ダイヘン
ロボット制御システム
1日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
株式会社マキタ
電動工具
16日前
個人
回転移動式工具ホルダ
10日前
住友重機械工業株式会社
ロボット及びカバー
23日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社ダイヘン
端末装置
16日前
株式会社マキタ
打ち込み工具
16日前
株式会社マキタ
打ち込み工具
16日前
住友重機械工業株式会社
アクチュエータ支持部材
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ