TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079483
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192182
出願日
2023-11-10
発明の名称
適応制御システムおよび適応制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G05B
13/04 20060101AFI20250515BHJP(制御;調整)
要約
【課題】 応答性のよい適応制御の実現と容易なゲイン調整とを両立することができる適応制御システムおよび適応制御方法を提供する。
【解決手段】 適応制御システムは、制御回路と、制御回路にフィードバックされる制御値を補償するための補償値を出力する並列フィードフォワード補償回路と、を備え、制御回路は、制御値および補償値と指令値とに基づいて操作値を出力し、並列フィードフォワード補償回路は、制御対象の周波数応答特性を逐次推定する同定器と、当該周波数応答特性に基づいて補償値を調整する調整器と、を含み、制御回路は、所定の応答を与えるように設計された規範モデルに制御対象が出力する制御値が追従するように複数の適応ゲインが調整され、複数の適応ゲインは、指令値の規範モデルの出力に対する偏差に与えられるフィードフォワードゲインと、規範モデルの出力の制御値および補償値に対する偏差に与えられるフィードバックゲインと、を含む。
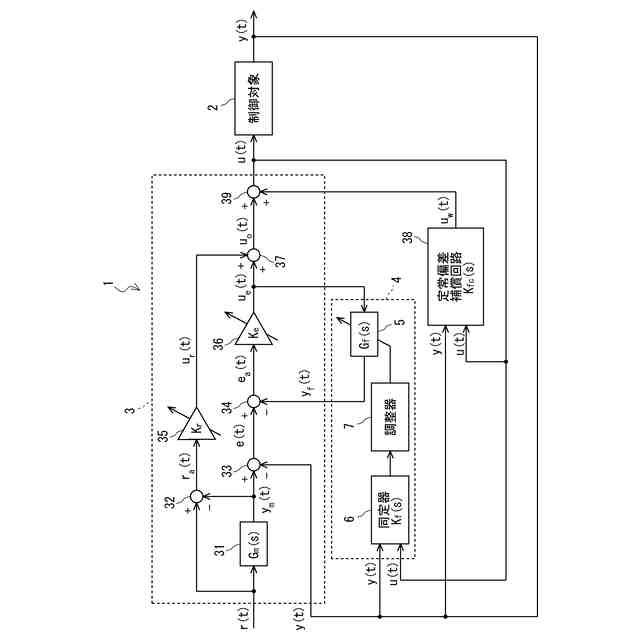
【選択図】 図1
特許請求の範囲
【請求項1】
制御対象に操作値を出力する制御回路と、
前記制御対象から出力され、前記制御回路にフィードバックされる制御値を補償するための補償値を前記操作値に基づいて出力する並列フィードフォワード補償回路と、を備え、
前記制御回路は、前記制御値および前記補償値と指令値とに基づいて前記操作値を出力し、
前記並列フィードフォワード補償回路は、前記制御対象の周波数応答特性を逐次推定する同定器と、当該周波数応答特性に基づいて前記補償値を調整する調整器と、を含み、
前記制御回路は、所定の応答を与えるように設計された規範モデルに前記制御対象が出力する前記制御値が追従するように複数の適応ゲインが調整され、
前記複数の適応ゲインは、前記指令値の前記規範モデルの出力に対する偏差に与えられるフィードフォワードゲインと、前記規範モデルの出力の前記制御値および前記補償値に対する偏差に与えられるフィードバックゲインと、を含む、適応制御システム。
続きを表示(約 1,300 文字)
【請求項2】
前記並列フィードフォワード補償回路は、前記フィードバックゲインが与えられた操作値成分に基づいて前記補償値を算出する、請求項1に記載の適応制御システム。
【請求項3】
前記操作値と前記制御値とに基づいて前記操作値を補償する定常偏差補償回路を備え、
前記定常偏差補償回路は、前記操作値と前記制御値との関係に基づいて決定される特性モデルを用いて前記操作値に対する定常偏差補償値を決定する、請求項1または2に記載の適応制御システム。
【請求項4】
前記特性モデルは、前記制御値に対する前記定常偏差補償値の関係が一次式で表される、請求項3に記載の適応制御システム。
【請求項5】
前記規範モデルの出力に対して動的補償を行う動的補償回路を備え、
前記同定器は、前記制御対象のモデルを逐次同定して前記制御対象の伝達関数を推定し、推定した前記伝達関数に基づいて前記制御対象の周波数応答特性を逐次推定し、
前記動的補償回路は、前記同定器が推定した前記伝達関数を用いて前記規範モデルの出力に対する動的補償値を決定する、請求項1または2に記載の適応制御システム。
【請求項6】
前記同定器は、前記制御対象のモデルを逐次同定して前記制御対象の伝達関数を推定し、推定した伝達関数に基づいて前記制御対象の周波数応答特性を逐次推定する、請求項1または2に記載の適応制御システム。
【請求項7】
前記同定器は、線形ブラックボックスモデルを適用する、請求項6に記載の適応制御システム。
【請求項8】
前記同定器は、前記線形ブラックボックスモデルの多項式表現における各係数を、カルマンフィルタを用いて推定する、請求項7に記載の適応制御システム。
【請求項9】
前記制御対象は、一定入力される前記操作値に対して出力される前記制御値がランプ状に上昇する積分系の伝達関数を有する、請求項1または2に記載の適応制御システム。
【請求項10】
制御対象に並列フィードフォワード補償回路を付加して構成される制御系を用いた適応制御方法であって、
制御対象に操作値を出力し、
前記制御対象から出力され、フィードバックされる制御値を補償するための補償値を前記操作値に基づいて出力し、
前記制御値および前記補償値と指令値とに基づいて前記操作値を出力し、
前記補償値を出力するために、前記制御対象の周波数応答特性を逐次推定し、当該周波数応答特性に基づいて前記補償値を調整し、
前記操作値を出力する際に、所定の応答を与えるように設計された規範モデルに前記制御対象が出力する前記制御値が追従するように複数の適応ゲインを調整し、
前記複数の適応ゲインは、前記指令値と前記規範モデルの出力との偏差に対するフィードフォワードゲインと、前記規範モデルの出力の前記制御値および前記補償値に対する偏差に与えられるフィードバックゲインと、を含む、適応制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、適応制御システムおよび適応制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
パラメータが未知である制御対象に対して、制御系を安定化しつつパラメータを推定する適応制御が知られている。このような適応制御において、応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置として、下記特許文献1が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-50767号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1の適応制御装置では、適応ゲインの調整時間を短縮することについて改善の余地がある。
【0005】
本開示は、上記課題を解決するためになされたものであり、応答性のよい適応制御の実現と容易なゲイン調整とを両立することができる適応制御システムおよび適応制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る適応制御システムは、制御対象に操作値を出力する制御回路と、前記制御対象から出力され、前記制御回路にフィードバックされる制御値を補償するための補償値を前記操作値に基づいて出力する並列フィードフォワード補償回路と、を備え、前記制御回路は、前記制御値および前記補償値と指令値とに基づいて前記操作値を出力し、前記並列フィードフォワード補償回路は、前記制御対象の周波数応答特性を逐次推定する同定器と、当該周波数応答特性に基づいて前記補償値を調整する調整器と、を含み、前記制御回路は、所定の応答を与えるように設計された規範モデルに前記制御対象が出力する前記制御値が追従するように複数の適応ゲインが調整され、前記複数の適応ゲインは、前記指令値の前記規範モデルの出力に対する偏差に与えられるフィードフォワードゲインと、前記規範モデルの出力の前記制御値および前記補償値に対する偏差に与えられるフィードバックゲインと、を含む。
【0007】
また、本開示の他の態様に係る適応制御方法は、制御対象に並列フィードフォワード補償回路を付加して構成される制御系を用いた適応制御方法であって、制御対象に操作値を出力し、前記制御対象から出力され、フィードバックされる制御値を補償するための補償値を前記操作値に基づいて出力し、前記制御値および前記補償値と指令値とに基づいて前記操作値を出力し、前記補償値を出力するために、前記制御対象の周波数応答特性を逐次推定し、当該周波数応答特性に基づいて前記補償値を調整し、前記操作値を出力する際に、所定の応答を与えるように設計された規範モデルに前記制御対象が出力する前記制御値が追従するように複数の適応ゲインを調整し、前記複数の適応ゲインは、前記指令値と前記規範モデルの出力との偏差に対するフィードフォワードゲインと、前記規範モデルの出力の前記制御値および前記補償値に対する偏差に与えられるフィードバックゲインと、を含む。
【発明の効果】
【0008】
本開示は、応答性のよい適応制御の実現と容易なゲイン調整とを両立することができる。
【図面の簡単な説明】
【0009】
図1は、本開示の一実施の形態に係る適応制御システムの概略構成例を示すブロック図である。
図2は、一般的なPFCを用いた制御装置におけるPFCの効果を説明するための、PFCを含む開ループ応答のグラフである。
図3は、本実施の形態において図1に示す適応制御システムにおけるPFCの調整の流れを示すフローチャートである。
図4は、ある制御対象の周波数応答特性およびそれに応じて設計したPFCの周波数応答特性を示すグラフである。
図5は、図4に示す制御対象およびPFCの周波数応答特性に基づく拡大制御系の周波数応答特性を示すグラフである。
図6は、図1に示す適応制御システムにおいて動的補償回路が付加された場合の概略構成例を示すブロック図である。
図7は、従来構成におけるSAC回路を含む適応制御システムの概略構成例を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施の形態を、図面を参照しながら説明する。なお、以下では全ての図を通じて同一または相当する要素には同一の参照符号を付して、その重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
低温流体移送用二重配管
1日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1日前
川崎重工業株式会社
操船支援システム、操船支援方法、及び、操船支援プログラム
1日前
エイブリック株式会社
基準電圧回路
2か月前
ローム株式会社
半導体集積回路
3日前
トヨタ自動車株式会社
ペダル機構
20日前
三栄ハイテックス株式会社
基準電圧回路
6日前
株式会社ダイフク
搬送設備
21日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
28日前
株式会社ダイフク
物品搬送設備
2日前
株式会社タブチ
減圧弁
1か月前
WHILL株式会社
電動モビリティ
29日前
株式会社計数技研
移動体、及びプログラム
21日前
ローム株式会社
半導体装置
9日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイヘン
搬送車
28日前
株式会社ダイヘン
移動体、及び誘導線検出装置
13日前
井関農機株式会社
作業車両
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
13日前
株式会社デンソー
診断装置
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
3日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社大林組
作業機械の自動運転制御システム
2日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社東海理化電機製作所
ペダル装置
16日前
株式会社ダイヘン
情報処理装置
28日前
オークラ輸送機株式会社
走行車および自律走行方法
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ