TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083602
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023196835
出願日
2023-11-20
発明の名称
検査システムおよび検査方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
G01N
21/84 20060101AFI20250523BHJP(測定;試験)
要約
【課題】ワークの対象の位置を確認するための使用者の手間を省くことが可能な検査システムを提供する。
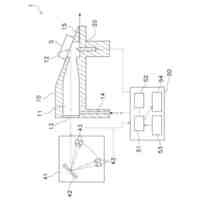
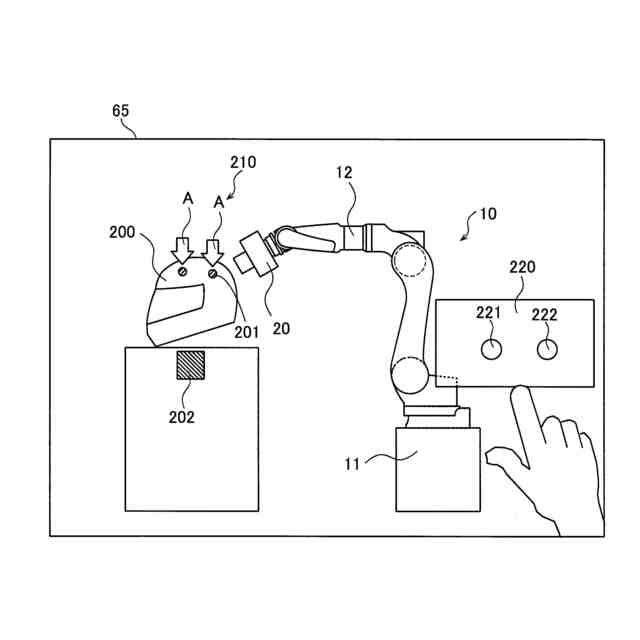
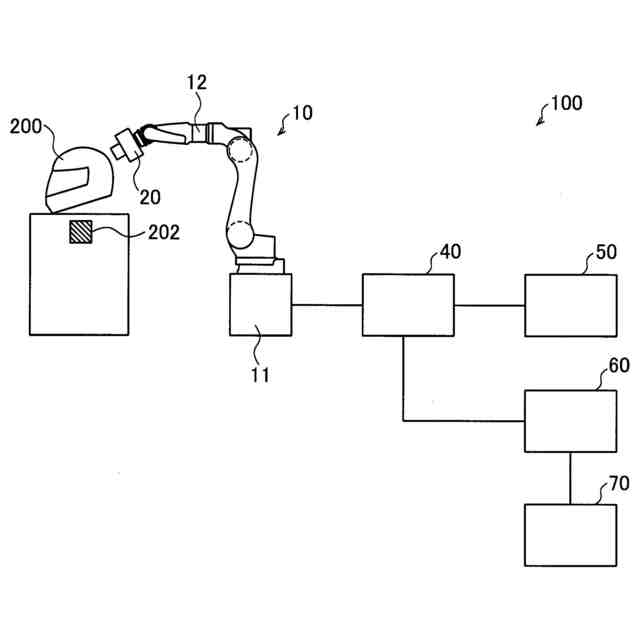
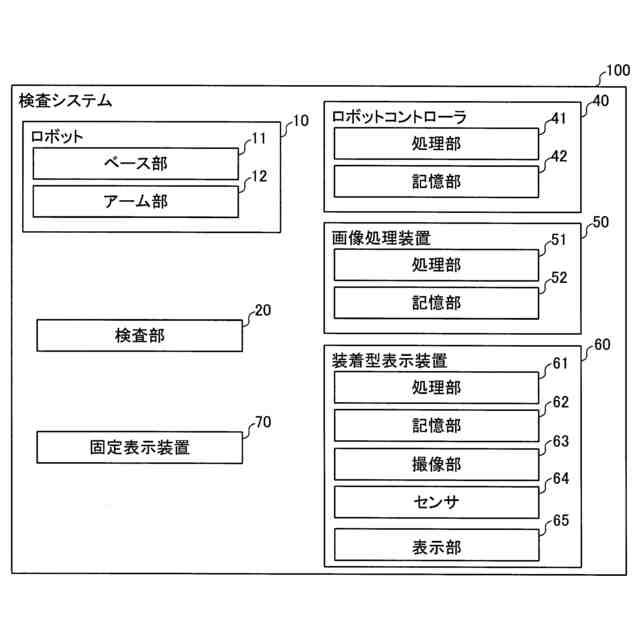
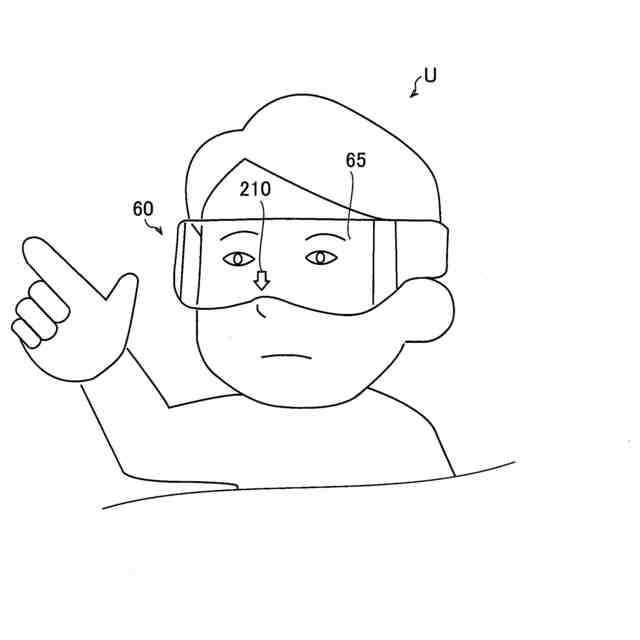
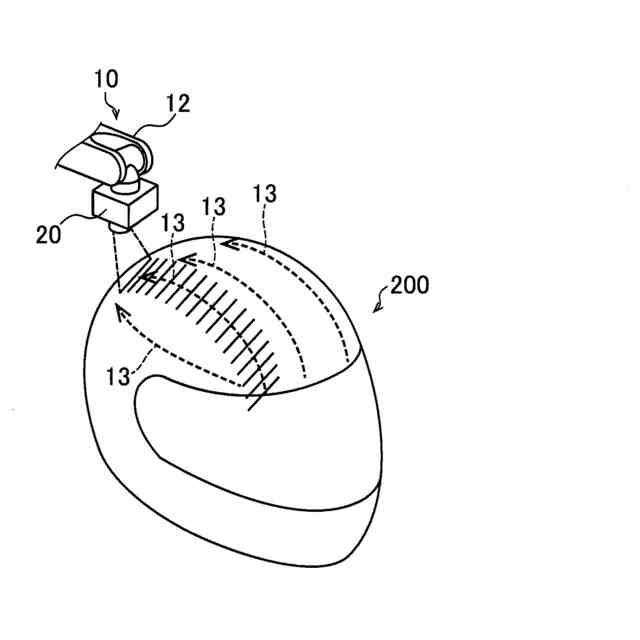
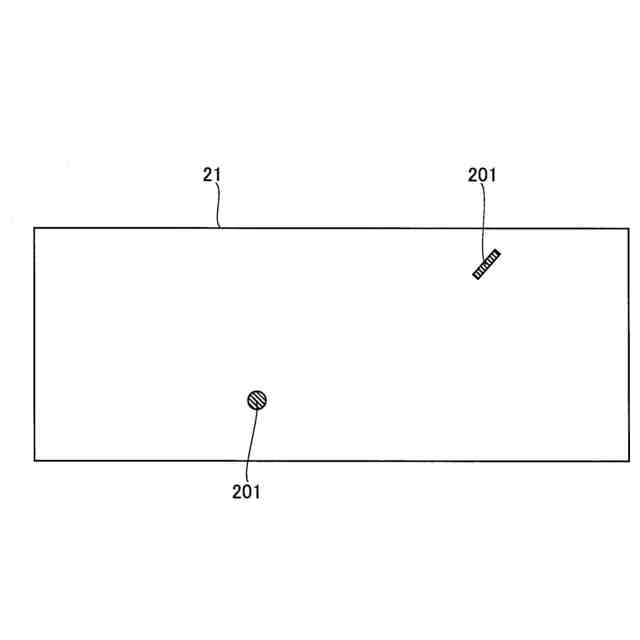
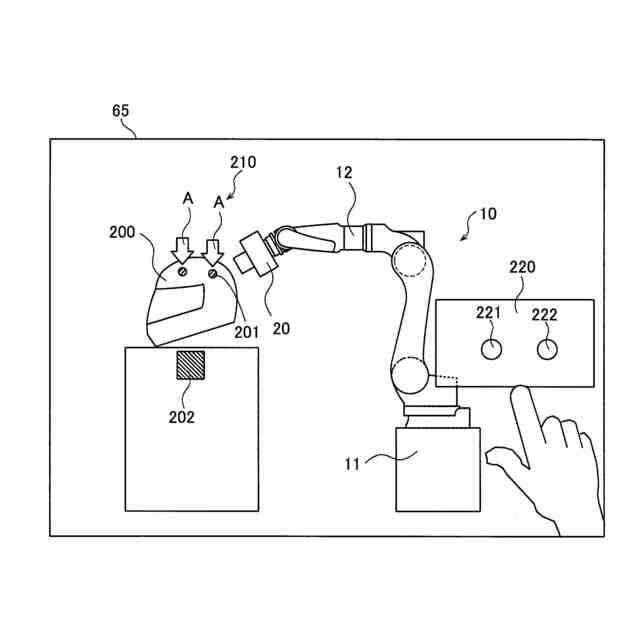
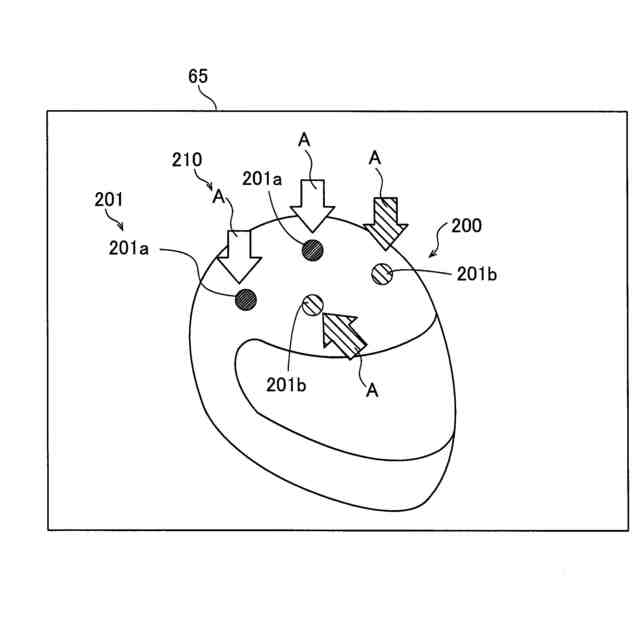
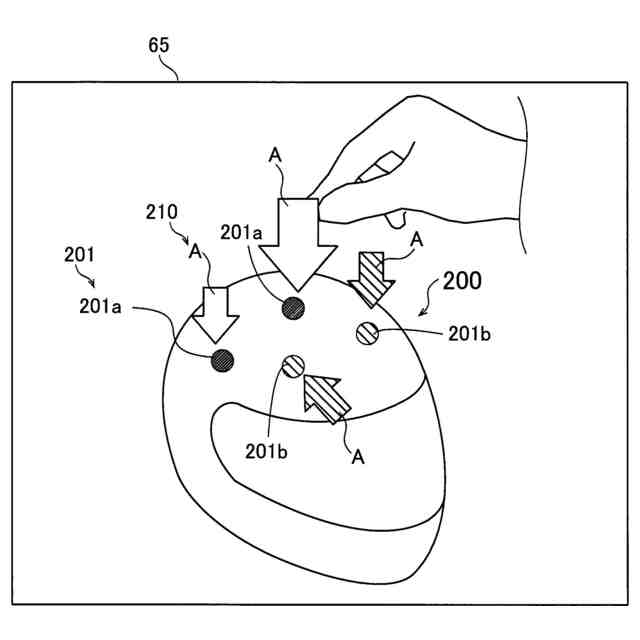
【解決手段】この検査システム100は、ロボット10によりワーク200に対して検査部20を相対的に移動させて、検査部20によりワーク200を検査することにより取得した検査画像21内のワーク200の対象201を検出する処理を行う画像処理装置50の処理部51と、使用者Uが視認する現実世界の像に重なるように、検出した対象201の位置を示す仮想画像としての仮想標識210を、使用者Uの動きに合わせて装着型表示装置60に表示させる処理を行う、装着型表示装置60の処理部61と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
ロボットと、
ワークを検査する検査部と、
使用者が視認する現実世界の像にコンピュータグラフィックにより生成された仮想画像を重ねて表示し、前記使用者に装着される装着型表示装置と、
前記ロボットにより前記ワークに対して前記検査部を相対的に移動させて、前記検査部により前記ワークを検査することにより、前記ワークの検査画像を取得する処理と、
取得した前記検査画像内の前記ワークの対象を検出する処理と、
前記使用者が視認する現実世界の像に重なるように、検出した前記対象の位置を示す前記仮想画像としての仮想標識を、前記使用者の動きに合わせて前記装着型表示装置に表示させる処理と、を行う、処理部と、を備える、検査システム。
続きを表示(約 820 文字)
【請求項2】
前記処理部は、
取得した前記検査画像内の前記ワークの前記対象を複数検出する処理と、
前記複数の対象の種類に応じて前記仮想標識の表示態様を異ならせる処理と、を行う、請求項1に記載の検査システム。
【請求項3】
前記処理部は、前記複数の対象のうち、前記仮想標識が表示される前記対象の種類を選択する前記仮想画像としての対象種類選択スイッチを表示する処理を行う、請求項2に記載の検査システム。
【請求項4】
前記対象は、前記ワークの欠陥を含む、請求項1に記載の検査システム。
【請求項5】
前記仮想標識は、前記対象の位置を指し示す矢印を含む、請求項1に記載の検査システム。
【請求項6】
前記処理部は、前記使用者によって前記仮想標識を拡大または縮小させる動作を検出した場合、前記使用者の拡大または縮小する動作に合わせて、前記仮想標識を拡大または縮小する処理を行う、請求項1に記載の検査システム。
【請求項7】
前記処理部は、前記装着型表示装置に前記仮想標識の表示および非表示を切り替える前記仮想画像としての表示切替スイッチを表示する処理を行う、請求項1に記載の検査システム。
【請求項8】
前記処理部は、前記装着型表示装置に前記仮想画像としての前記対象に対する作業内容を表示する処理を行う、請求項1に記載の検査システム。
【請求項9】
前記使用者には装着されずに固定的に配置され、前記装着型表示装置を通して前記使用者が視認する像および前記仮想標識を表示する固定型表示装置を備える、請求項1に記載の検査システム。
【請求項10】
前記装着型表示装置は、前記使用者の頭部に装着されるゴーグル型表示部を含む、請求項1に記載の検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、検査システムおよび検査方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、検査システムが知られている。たとえば、特許文献1には、ワークの塗装面の検査を行う表面検査装置が開示されている。この表面検査装置では、カメラによりワークが撮影される。そして、撮影されたワークの画像から、ワークの傷が検出される。そして、検出されたワークの傷の位置が表示装置に表示されたワークの図形上の位置に変換されて、表示装置に表示される。
【先行技術文献】
【特許文献】
【0003】
特開2008-046103号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載された表面検査装置では、ワークの傷の位置が表示装置に表示されたワークの図形上に表示されている。このため、現実世界のワークと、表示装置に表示されたワークの図形とは別物であるため、使用者は、表示装置に表示された図形によってワークの傷の位置を確認した後、実際のワークの傷を再び確認する必要がある。そのため、ワークの傷などの対象の位置を確認するための手間がかかるという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ワークの対象の位置を確認するための使用者の手間を省くことが可能な検査システムおよび検査方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による検査システムは、ロボットと、ワークを検査する検査部と、使用者が視認する現実世界の像にコンピュータグラフィックにより生成された仮想画像を重ねて表示し、使用者に装着される装着型表示装置と、ロボットによりワークに対して検査部を相対的に移動させて、検査部によりワークを検査することにより、ワークの検査画像を取得する処理と、取得した検査画像内のワークの対象を検出する処理と、使用者が視認する現実世界の像に重なるように、検出した対象の位置を示す仮想画像としての仮想標識を、使用者の動きに合わせて装着型表示装置に表示させる処理と、を行う、処理部と、を備える。
【0007】
この開示の第1の局面による検査システムでは、上記のように、使用者が視認する現実世界の像に重なるように、検出した対象の位置を示す仮想画像としての仮想標識を、使用者の動きに合わせて装着型表示装置に表示させる処理を行う、処理部を備える。これにより、使用者は、装着型表示装置を通して、現実世界の実際のワークと対象の位置を示す仮想画像との両方を視認することができるので、仮想標識に基づいて現実世界の実際のワークのどの位置に検出した対象が存在するのかを使用者は直接確認できる。そのため、ワークの対象の位置を確認するための使用者の手間を省くことができる。また、装着型表示装置を装着している使用者の動きに合わせて仮想標識が表示されるので、装着型表示装置を装着している使用者とワークとの相対的な位置が変化した場合でも、ワークと仮想標識との位置関係がずれることはない。そのため、装着型表示装置を装着している使用者が移動した場合でも、対象の位置を適切に確認できる。
【0008】
この開示の第2の局面による検査方法は、ロボットによりワークに対して検査部を相対的に移動させて、検査部によりワークを検査することにより、ワークの検査画像を取得することと、取得した検査画像内のワークの対象を検出することと、使用者が視認する現実世界の像に重なるように、検出した対象の位置を示すコンピュータグラフィックにより生成された仮想画像としての仮想標識を、使用者に装着される装着型表示装置に使用者の動きに合わせて表示させることと、を備える。
【0009】
この開示の第2の局面による検査方法では、上記のように、使用者が視認する現実世界の像に重なるように、検出した対象の位置を示すコンピュータグラフィックにより生成された仮想画像としての仮想標識を、使用者に装着される装着型表示装置に使用者の動きに合わせて表示させることを備える。これにより、使用者は、装着型表示装置を通して、現実世界の実際のワークと対象の位置を示す仮想画像との両方を視認することができるので、仮想標識に基づいて現実世界の実際のワークのどの位置に検出した対象が存在するのかを使用者は直接確認できる。そのため、ワークの対象の位置を確認するための使用者の手間を省くことが可能な検査方法を提供できる。また、装着型表示装置を装着している使用者の動きに合わせて仮想標識が表示されるので、装着型表示装置を装着している使用者とワークとの相対的な位置が変化した場合でも、ワークと仮想標識との位置関係がずれることはない。そのため、装着型表示装置を装着している使用者が移動した場合でも、対象の位置を適切に確認することが可能な検査方法を提供できる。
【発明の効果】
【0010】
本開示の検査システムおよび検査方法は、上記のように、ワークの対象の位置を確認するための使用者の手間を省くことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
6日前
株式会社東光高岳
計器
2日前
日本精機株式会社
液面検出装置
8日前
大和製衡株式会社
組合せ秤
8日前
大和製衡株式会社
組合せ秤
14日前
大和製衡株式会社
組合せ秤
8日前
個人
フロートレス液面センサー
21日前
日本特殊陶業株式会社
ガスセンサ
今日
日本特殊陶業株式会社
ガスセンサ
今日
日本特殊陶業株式会社
ガスセンサ
20日前
日本特殊陶業株式会社
ガスセンサ
9日前
ダイハツ工業株式会社
試験用治具
14日前
キヤノン株式会社
放射線撮像装置
23日前
日本特殊陶業株式会社
ガスセンサ
9日前
エグゼヴィータ株式会社
端末装置
今日
富士電機株式会社
エンコーダ
1日前
富士電機株式会社
エンコーダ
1日前
バイオテック株式会社
容器設置装置
今日
株式会社クボタ
作業車
13日前
柳井電機工業株式会社
部材検査装置
今日
株式会社ノーリツ
通信システム
6日前
新電元メカトロニクス株式会社
位置検出装置
6日前
TDK株式会社
計測装置
7日前
旭光電機株式会社
漏出検出装置
20日前
大同特殊鋼株式会社
ラベル色特定方法
23日前
株式会社フジキン
流量測定装置
15日前
トヨタ自動車株式会社
歯車の検査方法
9日前
株式会社アステックス
ラック型負荷装置
21日前
帝国通信工業株式会社
圧力センサ
今日
ジャパンプローブ株式会社
超音波探触子
今日
株式会社島津製作所
発光分析装置
6日前
日本電気株式会社
測位装置及びその方法
2日前
住友化学株式会社
積層基板
20日前
日本製鉄株式会社
評価方法
21日前
DIC株式会社
凹凸増幅用具
6日前
大和ハウス工業株式会社
計測用治具
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ