TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075067
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2025024871,2021140738
出願日
2025-02-19,2021-08-31
発明の名称
ロボットシステム、ロボットおよびロボットの動作方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250507BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節ロボットアームによりワークに対して作業部を相対移動させながら作業を行う際に、設定作業が煩雑になるのを抑制することが可能なロボットシステムを提供する。
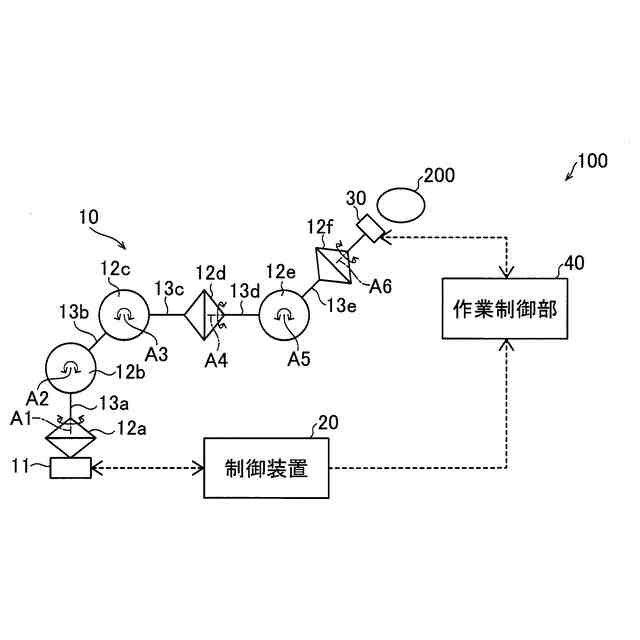
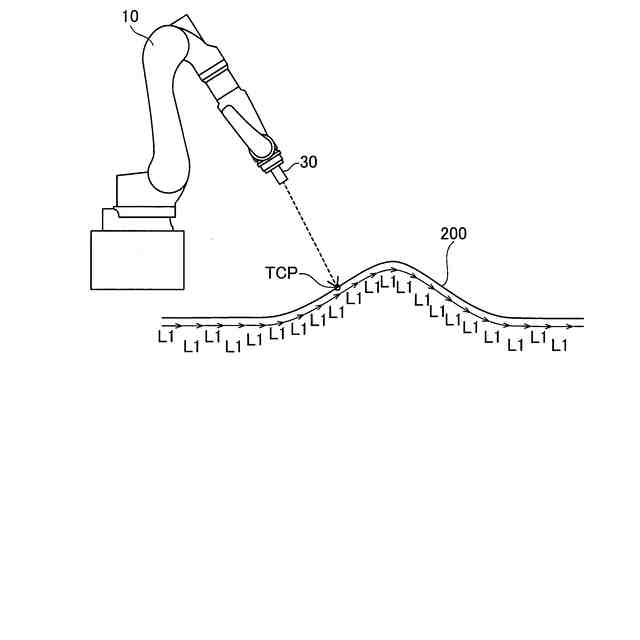
【解決手段】このロボットシステム100は、レーザプロファイルセンサ、測距センサ、塗布部、貼付部、溶接部および超音波探傷部のうち少なくとも1つを含み、ワーク200に対して作業を行う作業部30と、複数の関節を含み、作業部30が先端部に設けられ、作業部30を移動させる多関節ロボットアーム10と、多関節ロボットアーム10を移動させる制御を行うロボット制御部21と、多関節ロボットアーム10の先端部に設けられた作業部30の移動による、ワーク200に対する作業部30の相対移動量毎に、作業部30の相対移動量に基づく信号を出力する信号出力部22と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
レーザプロファイルセンサ、測距センサ、塗布部、貼付部、溶接部および超音波探傷部のうち少なくとも1つを含み、ワークに対して作業を行う作業部と、
複数の関節を含み、前記ワークまたは前記作業部が先端部に設けられ、前記ワークまたは前記作業部を移動させる多関節ロボットアームと、
前記多関節ロボットアームを移動させる制御を行うロボット制御部と、
前記多関節ロボットアームの先端部に設けられた前記ワークまたは前記作業部の移動による、前記ワークに対する前記作業部の相対移動量毎に、前記作業部の相対移動量に基づく信号を出力する信号出力部と、
前記信号出力部から出力される信号に基づいて前記作業部による前記ワークに対する作業を制御する作業制御部と、を備える、ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
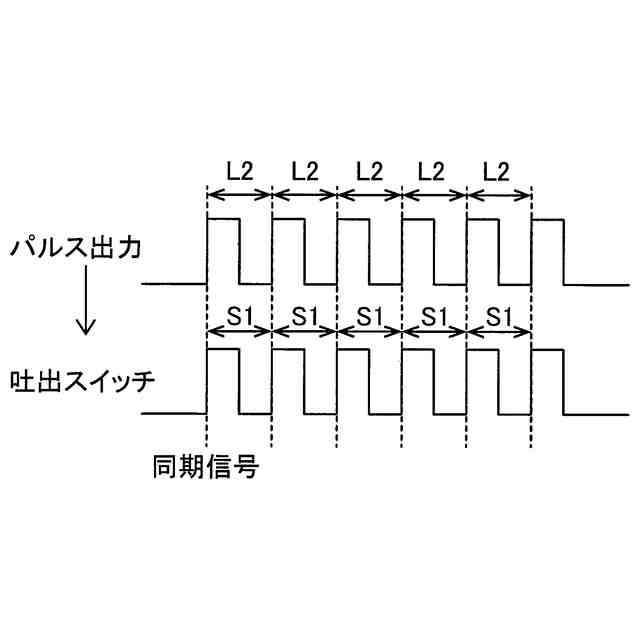
前記信号出力部は、前記ワークに対する前記作業部の相対移動量毎に、前記作業部の相対移動量に基づく信号を可変周波数のパルス信号により出力する、請求項1に記載のロボットシステム。
【請求項3】
前記信号出力部は、前記ワークに対する前記作業部の相対移動量毎に、所定のパルス信号を出力する、請求項2に記載のロボットシステム。
【請求項4】
前記作業制御部は、前記信号出力部から出力される信号をトリガーとして、前記ワークに対する前記作業部による作業を制御する、請求項1~3のいずれか1項に記載のロボットシステム。
【請求項5】
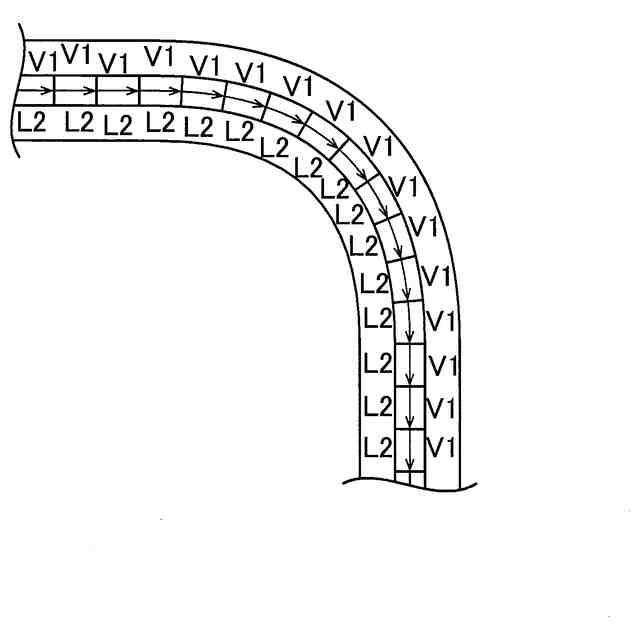
前記作業制御部は、前記信号出力部から出力される信号に基づいて、前記作業部を一定移動量毎に作業させる、請求項1~4のいずれか1項に記載のロボットシステム。
【請求項6】
前記ロボット制御部は、前記ワークの表面に沿って、前記多関節ロボットアームにより前記ワークに対して前記作業部を曲線状に相対移動させる、請求項1~5のいずれか1項に記載のロボットシステム。
【請求項7】
前記信号出力部は、前記作業部の複数の位置の各々の相対移動に基づいて、各々に対応する複数の信号を出力する、請求項1~6のいずれか1項に記載のロボットシステム。
【請求項8】
複数の関節を含み、ワークまたは前記ワークに対して作業を行う作業部が先端部に設けられ、前記ワークまたは前記作業部を移動させる多関節ロボットアームと、
前記多関節ロボットアームを移動させる制御を行うロボット制御部と、
前記多関節ロボットアームの先端部に設けられた前記ワークまたは前記作業部の移動による、前記ワークに対する前記作業部の相対移動量毎に、前記作業部の相対移動量に基づく信号を出力する信号出力部と、を備え、
前記作業部は、レーザプロファイルセンサ、測距センサ、塗布部、貼付部、溶接部および超音波探傷部のうち少なくとも1つを含む、ロボット。
【請求項9】
前記信号出力部は、前記ワークに対する前記作業部の相対移動量毎に、前記作業部の相対移動量に基づく信号をパルス信号により出力する、請求項8に記載のロボット。
【請求項10】
前記信号出力部は、前記多関節ロボットアームの先端部に設けられた前記ワークまたは前記作業部の移動に基づいて、前記ワークに対する前記作業部の相対位置を出力する、請求項8または9に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、ロボットおよびロボットの動作方法に関し、特に、多関節ロボットアームを備えるロボットシステム、ロボットおよびロボットの動作方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、多関節ロボットアームを備えるロボットが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、複数の関節を含む多関節ロボットアームと、多関節ロボットアームを移動させる制御を行う制御装置と、多関節ロボットアームの先端に設けられ、検査対象の撮像を行う撮像器と、を備えるロボットシステムが開示されている。この特許文献1のロボットシステムでは、制御装置は、多関節ロボットアームの先端部が予め設定された位置に移動した場合に、撮像器に対して検査対象の撮像を行うように撮像指令信号を送信する。
【先行技術文献】
【特許文献】
【0004】
特開2013-166185号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1では、制御装置は、多関節ロボットアームの先端部が予め設定された位置に移動した場合に、撮像器に対して検査対象の撮像を行うように撮像指令信号を送信する。このため、撮像などの作業を行わせる位置が多くなる場合には、多くの位置を予め設定する必要があり、作業を行わせる位置を設定する設定作業が煩雑になる。このため、多関節ロボットアームによりワークに対して作業部を相対移動させながら作業を行う際に、設定作業が煩雑になるのを抑制することが望まれている。
【0006】
本開示は、上記のような課題を解決するためになされたものであり、本開示の1つの目的は、多関節ロボットアームによりワークに対して作業部を相対移動させながら作業を行う際に、設定作業が煩雑になるのを抑制することが可能なロボットシステム、ロボットおよびロボットの動作方法を提供することである。
【課題を解決するための手段】
【0007】
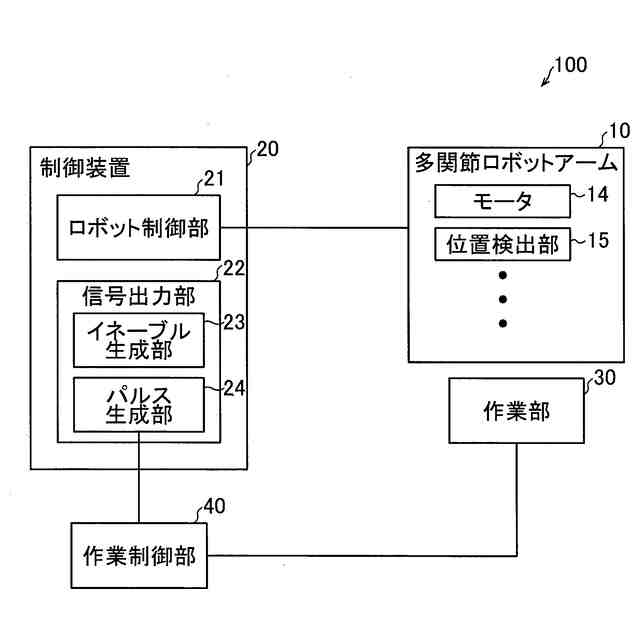
上記目的を達成するために、第1の局面によるロボットシステムは、レーザプロファイルセンサ、測距センサ、塗布部、貼付部、溶接部および超音波探傷部のうち少なくとも1つを含み、ワークに対して作業を行う作業部と、複数の関節を含み、ワークまたは作業部が先端部に設けられ、ワークまたは作業部を移動させる多関節ロボットアームと、多関節ロボットアームを移動させる制御を行うロボット制御部と、多関節ロボットアームの先端部に設けられたワークまたは作業部の移動による、ワークに対する作業部の相対移動量毎に、作業部の相対移動量に基づく信号を出力する信号出力部と、信号出力部から出力される信号に基づいて作業部によるワークに対する作業を制御する作業制御部と、を備える。
【0008】
第1の局面によるロボットシステムでは、上記のように、ワークに対する作業部の相対移動量毎に、作業部の相対移動量に基づく信号を出力する信号出力部を設ける。また、信号出力部から出力される信号に基づいて作業部によるワークに対する作業を制御する作業制御部を設ける。これにより、作業制御部は、ワークに対して作業部の相対移動量を、相対移動毎に取得して、作業部による作業を制御することができるので、全ての作業位置を予め設定しなくても、ワークに対して作業を行わせることができる。その結果、多関節ロボットアームによりワークに対して作業部を相対移動させながら作業を行う際に、設定作業が煩雑になるのを抑制することができる。また、ワークの直線部および曲線部の両方に対して作業を行う場合などのように、多関節ロボットアームによる作業部の相対移動の速度が一定でない場合でも、所定の相対移動量毎にワークに対して作業部により作業を行うことができる。すなわち、曲線部などの複雑な相対移動を伴う作業では、相対移動の速度を大きくすることが困難であるため、作業部の相対移動の速度を一定にしようとした場合に、相対移動の速度を大きくすることが可能な直線部などの移動についても、相対移動の速度を小さくしなくてはならない。一方、本開示では、速度ではなく所定の相対移動量毎にワークに対して作業を行うことにより、作業部の相対移動の速度を一定にする必要がないので、相対移動の速度を大きくすることが可能な作業位置においては、速度を大きくすることができる。これにより、全体として作業の速度が遅くなるのを抑制することができる。また、速度によらずワークに対して作業部により一定の作業を行いながら、ワークに対して作業部の相対移動の速度を変えて移動させた場合には、相対速度が小さくなる曲線部などにおいて、ワークに対する作業部の作業が相対速度が大きくなる直線部などに比べて密になってしまう。一方、本開示では、所定の相対移動量毎にワークに対して作業を行うことにより、作業部の相対移動の速度が小さくなる位置において、相対移動の速度が大きい位置よりも、作業部による作業が密になることを抑制することができるので、ワークに対する作業部の作業にムラが発生するのを抑制することができる。
【0009】
第2の局面によるロボットは、複数の関節を含み、ワークまたはワークに対して作業を行う作業部が先端部に設けられ、ワークまたは作業部を移動させる多関節ロボットアームと、多関節ロボットアームを移動させる制御を行うロボット制御部と、多関節ロボットアームの先端部に設けられたワークまたは作業部の移動による、ワークに対する作業部の相対移動量毎に、作業部の相対移動量に基づく信号を出力する信号出力部と、を備え、作業部は、レーザプロファイルセンサ、測距センサ、塗布部、貼付部、溶接部および超音波探傷部のうち少なくとも1つを含む。
【0010】
第2の局面によるロボットでは、上記のように、ワークに対する作業部の相対移動量毎に、作業部の相対移動量に基づく信号を出力する信号出力部を設ける。これにより、信号出力部から出力される信号に基づいて、ワークに対して作業部の相対移動量を、相対移動毎に取得して、作業部による作業を制御することができるので、全ての作業位置を予め設定しなくても、ワークに対して作業を行わせることができる。その結果、多関節ロボットアームによりワークに対して作業部を相対移動させながら作業を行う際に、設定作業が煩雑になるのを抑制することが可能なロボットを提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
4日前
株式会社クレスコ
補助吸着具
1か月前
トヨタ自動車株式会社
関節機構
9日前
株式会社ダイヘン
移動体
7日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
18日前
株式会社スター精機
吸着パッド
3日前
株式会社スター精機
吸着パッド
3日前
学校法人五島育英会
アーム機構
9日前
住友重機械工業株式会社
ロボット
29日前
川崎重工業株式会社
制動システム
1か月前
株式会社アイエイアイ
グリッパー
24日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社PILLAR
チューブ保持治具
14日前
庄内機械株式会社
釘打装置
22日前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
17日前
株式会社スター精機
産業用ロボット
1日前
芝浦機械株式会社
双腕ロボット
28日前
株式会社マキタ
電動作業機
10日前
株式会社マキタ
電動作業機
10日前
株式会社リコー
多関節ロボット
8日前
トヨタ自動車東日本株式会社
搬送治具
22日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車株式会社
荷姿影響緩和方法
25日前
株式会社安川電機
ロボット
1日前
株式会社ダイヘン
ロボット制御システム
7日前
株式会社安川電機
ロボット
1日前
株式会社安川電機
ロボット
1日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
セイコーエプソン株式会社
ロボット
3日前
小倉クラッチ株式会社
ロボット用ツール交換装置
3日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ