TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075770
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187169
出願日
2023-10-31
発明の名称
ロボットシステム、ロボット動作方法、および、ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250508BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームによってワークに対して作業を行う場合に、システムの構成の複雑化を抑制可能なロボットシステム、ロボット動作方法、および、ロボットを提供する。
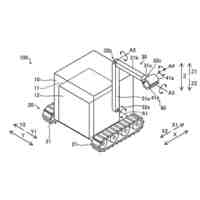
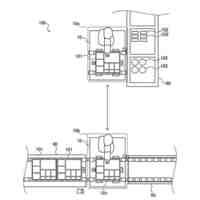
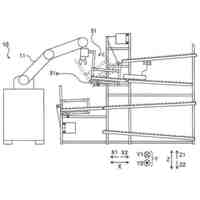
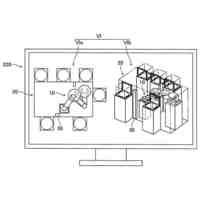
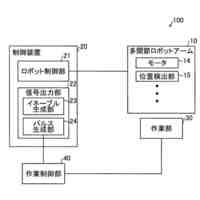
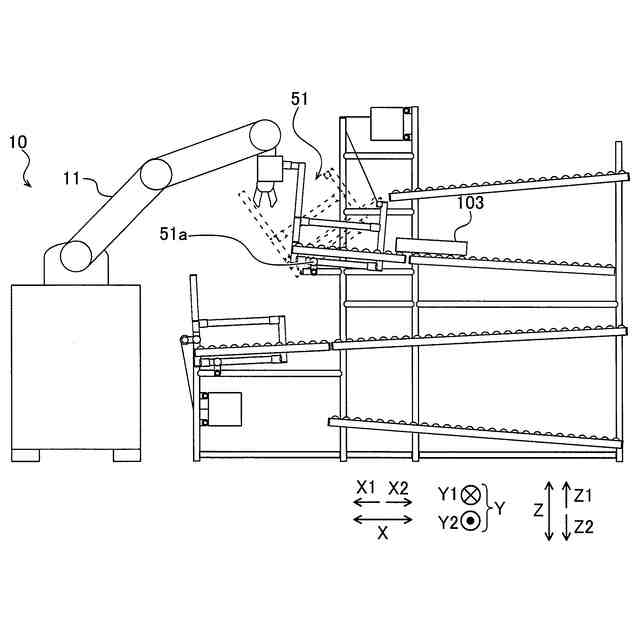
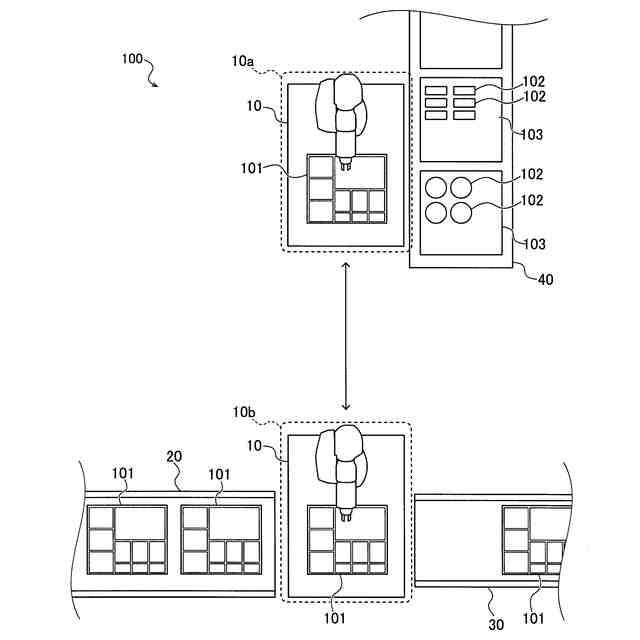
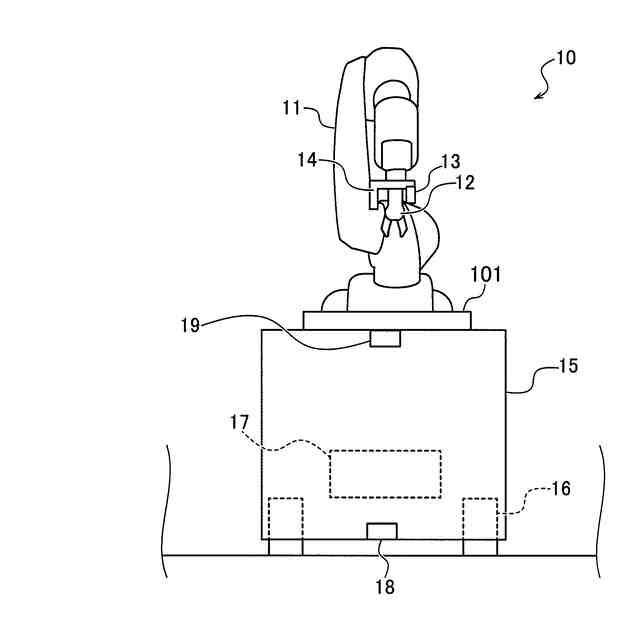
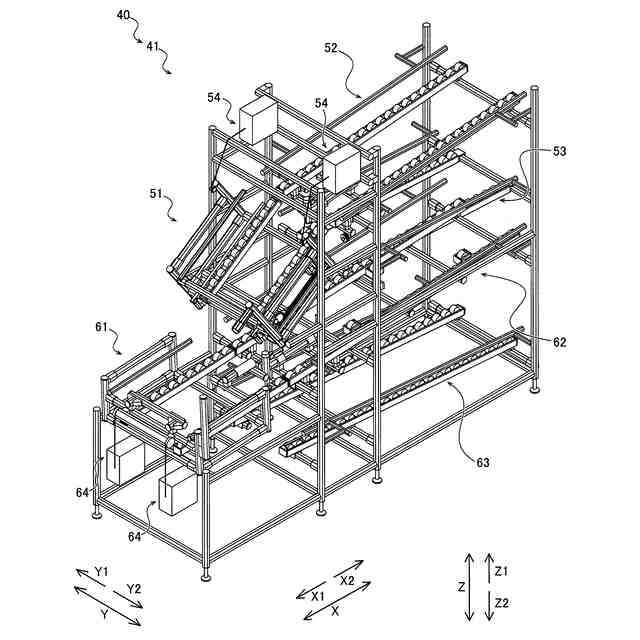
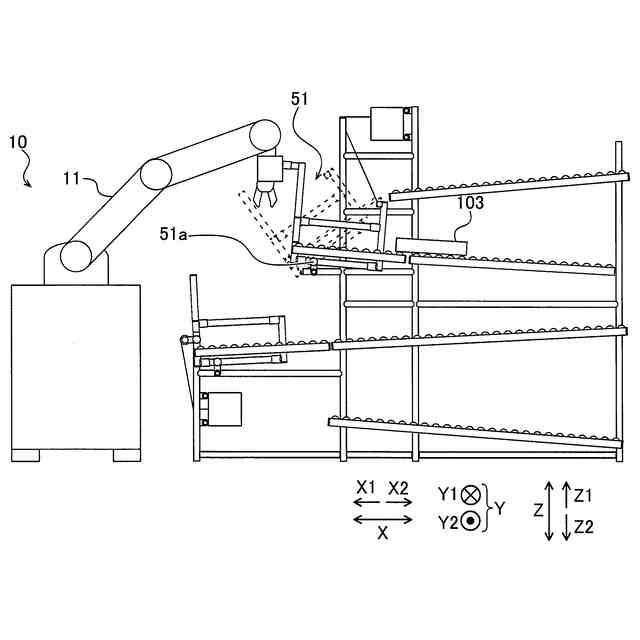
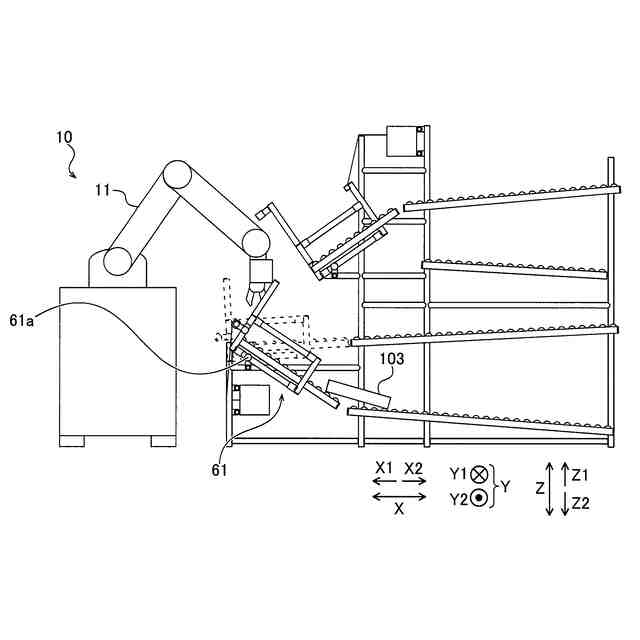
【解決手段】このロボットシステム100は、収容箱103を保持する保持姿勢と収容箱103を補充するための補充姿勢とを切り替えるワーク保持部51と、ワーク保持部51の保持姿勢と補充姿勢とを変更させる姿勢変更動作と、収容箱103に対して作業する作業動作とを行うロボットアーム11を有するロボット10と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
ワークを保持する保持姿勢と前記ワークを補充するための補充姿勢とを切り替えるワーク保持部と、
前記ワーク保持部の前記保持姿勢と前記補充姿勢とを変更させる姿勢変更動作と、前記ワークに対して作業する作業動作とを行うロボットアームを有するロボットと、を備える、ロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記ワーク保持部は、所定の回転軸線回りに回動することによって、前記保持姿勢と前記補充姿勢とを切り替え、
前記ロボットは、前記ロボットアームの動作により前記ワーク保持部を回動させることによって、前記ワーク保持部の前記保持姿勢と前記補充姿勢とを変更させる前記姿勢変更動作を行う、請求項1に記載のロボットシステム。
【請求項3】
前記ワーク保持部に対して付勢力を加えることによって前記保持姿勢に保つ姿勢付勢部をさらに備え、
前記ロボットは、前記ロボットアームの動作により前記姿勢付勢部の付勢力に抗しながら前記ワーク保持部を前記保持姿勢から前記補充姿勢へと変更させる前記姿勢変更動作を行う、請求項1または2に記載のロボットシステム。
【請求項4】
前記ワーク保持部は、対象物が収容された収容箱を含む前記ワークを保持する前記保持姿勢と、前記収容箱を補充するために保持されている前記収容箱を排出する前記補充姿勢としての排出姿勢とを切り替え、
前記ロボットは、保持されている前記収容箱を入れ替えるために、前記ロボットアームの動作により前記ワーク保持部の前記保持姿勢と前記排出姿勢とを変更させる前記姿勢変更動作を行う、請求項1または2に記載のロボットシステム。
【請求項5】
前記ロボットは、前記ワーク保持部に保持されている前記収容箱が空である場合に、前記ロボットアームにより前記姿勢変更動作を行うことによって前記収容箱を入れ替える、請求項4に記載のロボットシステム。
【請求項6】
前記ワーク保持部に対して前記ワークを補充する補充部をさらに備え、
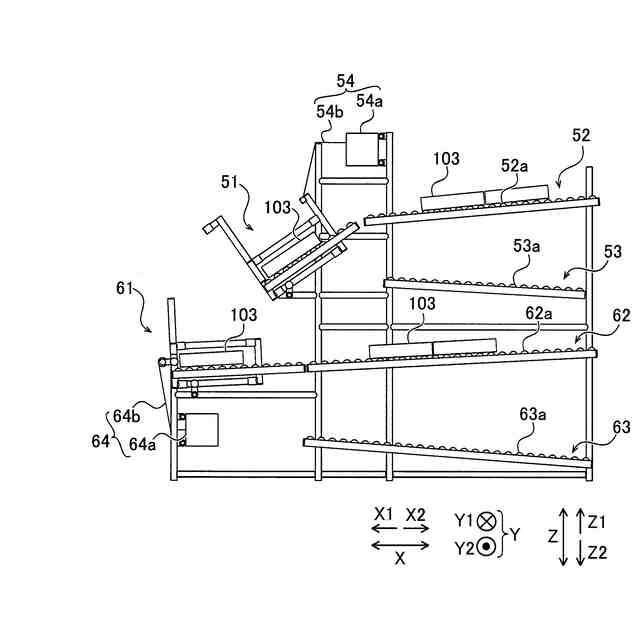
前記補充部は、前記ワークが載置される補充斜面を有し、前記補充斜面からスライド移動させることによって前記ワーク保持部に対して前記ワークを補充する、請求項1または2に記載のロボットシステム。
【請求項7】
前記補充部は、前記補充斜面に載置された前記ワークを保持するストッパ部を含む、請求項6に記載のロボットシステム。
【請求項8】
前記ストッパ部は、前記ロボットアームの動作により前記ワーク保持部の姿勢が変更されることと連動して、前記補充斜面において前記ワークを保持している状態と保持を解除する状態とを切り替える、請求項7に記載のロボットシステム。
【請求項9】
前記ワーク保持部から前記ワークを排出する排出部をさらに備え、
前記ワーク保持部は、前記ロボットアームによる前記姿勢変更動作によって、前記ワークを保持した前記保持姿勢から前記補充姿勢に姿勢が変更されることによって前記排出部に前記ワークを排出するとともに、前記補充姿勢から前記保持姿勢に姿勢が戻されることによって前記補充斜面から前記ワークが補充される、請求項6に記載のロボットシステム。
【請求項10】
前記ワーク保持部は、前記補充斜面からスライド移動しながら補充された前記ワークの移動速度を低減させるダンパ部を含む、請求項6に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステム、ロボット動作方法、および、ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ロボットを備える倉庫管理システムが開示されている。特許文献1に開示されている倉庫管理システムは、物品を収容する棚を搬送する搬送ロボットと、棚に対する物品の搬入および搬出の作業を行うアームロボットとを備えている。アームロボットは作業エリアの任意の位置に固定されている。搬送ロボットは、目的の棚を取り出してアームロボットまで搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2021-44370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1のように、ロボットアームを用いて物品などのワークに対して作業を行う場合において、搬送ロボットのようにワークを入れ替えて補充するための動作を行う専用のロボットが配置される場合には、作業を行うロボットとは別個にワークを補充するための動作を行うロボットを配置することに起因して、システムの構成が複雑化する。そのため、ロボットアームによってワークに対して作業を行う場合に、システムの構成の複雑化を抑制することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームによってワークに対して作業を行う場合に、システムの構成の複雑化を抑制可能なロボットシステム、ロボット動作方法、および、ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるロボットシステムは、ワークを保持する保持姿勢とワークを補充するための補充姿勢とを切り替えるワーク保持部と、ワーク保持部の保持姿勢と補充姿勢とを変更させる姿勢変更動作と、ワークに対して作業する作業動作とを行うロボットアームを有するロボットと、を備える。
【0007】
この開示の第1の局面によるロボットシステムは、上記のように、ワーク保持部の保持姿勢と補充姿勢とを変更させる姿勢変更動作と、ワークに対して作業する作業動作とを行うロボットアームを有するロボットを備える。これにより、ロボットアームの動作によって、ワークを補充するための補充姿勢にワーク保持部の姿勢を変更させることができる。そのため、ワーク保持部にワークを補充させるための動作を行うロボットを別個に配置することなく、ワークに対して作業を行うロボットによりワーク保持部にワークを補充することができる。その結果、ロボットアームによってワークに対して作業を行う場合に、システムの構成の複雑化を抑制できる。
【0008】
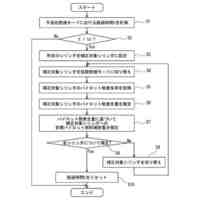
この開示の第2の局面によるロボット動作方法は、ロボットアームによりワークに対して作業する作業動作を行い、ロボットアームによりワーク保持部のワークを保持する保持姿勢と、ワークを補充するための補充姿勢とを変更させる姿勢変更動作を行う。
【0009】
この開示の第2の局面によるロボット動作方法は、上記のように、ロボットアームによりワーク保持部のワークを保持する保持姿勢と、ワークを補充するための補充姿勢とを変更させる姿勢変更動作を行う。これにより、ロボットアームの動作によって、ワークを補充するための補充姿勢にワーク保持部の姿勢を変更させることができる。そのため、ワーク保持部にワークを補充させるための動作を行うロボットを別個に配置することなく、ワークに対して作業を行うロボットによりワーク保持部にワークを補充することができる。その結果、ロボットアームによってワークに対して作業を行う場合に、システムの構成の複雑化を抑制可能なロボット動作方法を提供できる。
【0010】
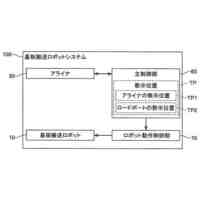
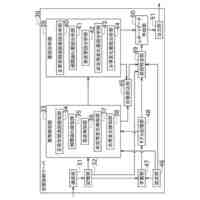
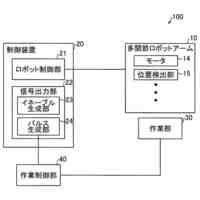
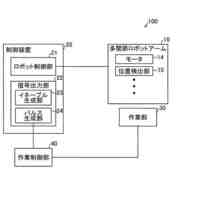
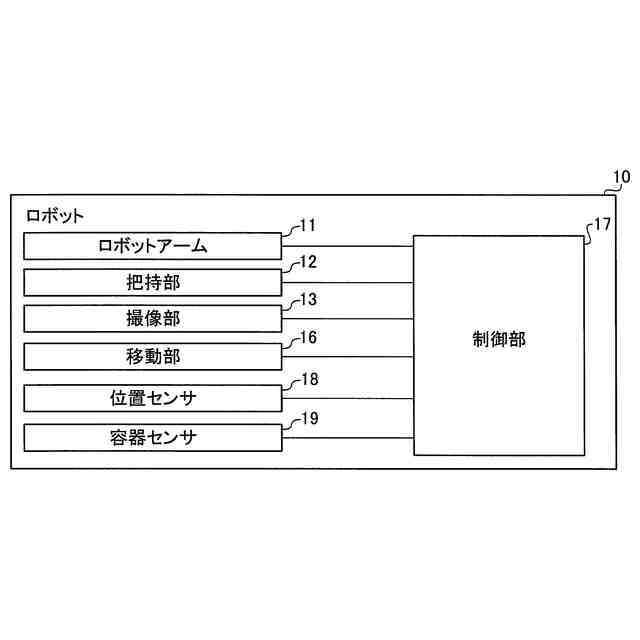
この開示の第3の局面によるロボットは、ワークに対して作業する作業動作を行うロボットアームと、ワーク保持部のワークを保持する保持姿勢と、ワークを補充するための補充姿勢とを変更させる姿勢変更動作と、作業動作とを、ロボットアームにより実行する制御部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
水素航空機
1日前
川崎重工業株式会社
制動システム
15日前
川崎重工業株式会社
動翼の制振構造
17日前
川崎重工業株式会社
廃棄物処理システム
19日前
川崎重工業株式会社
廃棄物処理システム
19日前
川崎重工業株式会社
段差昇降用移動装置
17日前
川崎重工業株式会社
低温流体の移送システム
2日前
川崎重工業株式会社
基板搬送ロボットシステム
15日前
川崎重工業株式会社
アンモニア除害装置及び方法
4日前
川崎重工業株式会社
温度履歴解析システム及び方法
15日前
川崎重工業株式会社
温度推移解析装置及び温度推移解析方法
1か月前
川崎重工業株式会社
水素燃料供給システム及び水素の液化方法
16日前
川崎重工業株式会社
水素燃料供給システム及び水素の液化方法
16日前
川崎重工業株式会社
異常検知装置、異常検知システム及び異常検知方法
4日前
川崎重工業株式会社
燃料噴射量制御システムおよび燃料噴射量制御方法
17日前
川崎重工業株式会社
搬送システム、搬送物の搬送方法、および、ロボット
2日前
川崎重工業株式会社
作業管理システムおよびそれに用いられる情報処理装置
1か月前
川崎重工業株式会社
ロボットシステム、ロボット動作方法、および、ロボット
2日前
川崎重工業株式会社
液化水素移送システムおよびその中間移送設備、パージ方法
2日前
川崎重工業株式会社
水素のトレーサビリティデータ管理システムおよび管理方法
1か月前
川崎重工業株式会社
手術支援システム、手術装置および手術支援システムの制御方法
8日前
川崎重工業株式会社
ロボットの動作経路生成方法およびロボットの動作経路生成装置
1か月前
川崎重工業株式会社
ロボットの動作経路生成方法およびロボットの動作経路生成装置
1か月前
川崎重工業株式会社
グリス交換時期予測方法
4日前
川崎重工業株式会社
散布物分布状態の表示処理装置、表示処理方法、及び、表示処理プログラム
15日前
川崎重工業株式会社
ロボットの動作方法およびプログラム
15日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
15日前
川崎重工業株式会社
ロボットシステム、ロボットおよびロボットの動作方法
3日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
23日前
株式会社不二越
ロボット
15日前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ