TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068922
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023179045
出願日
2023-10-17
発明の名称
段差昇降用移動装置
出願人
川崎重工業株式会社
代理人
個人
主分類
B62D
57/02 20060101AFI20250422BHJP(鉄道以外の路面車両)
要約
【課題】段差の昇降時における段差昇降用移動装置の姿勢をより安定させることが可能な段差昇降用移動装置を提供する。
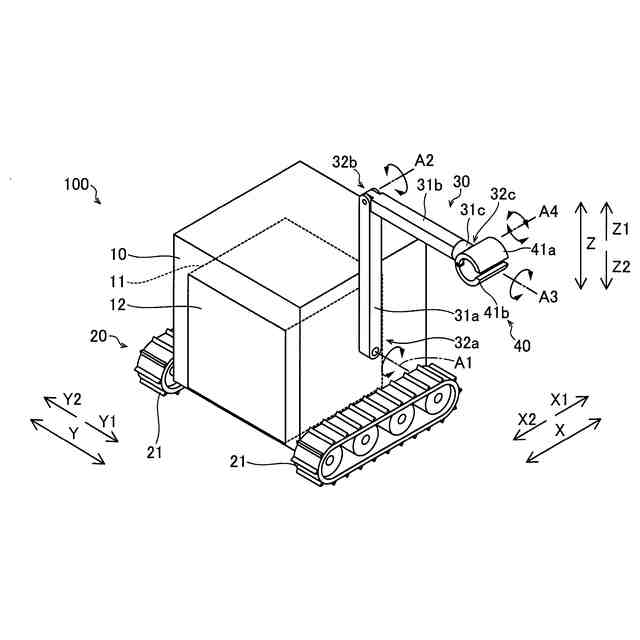
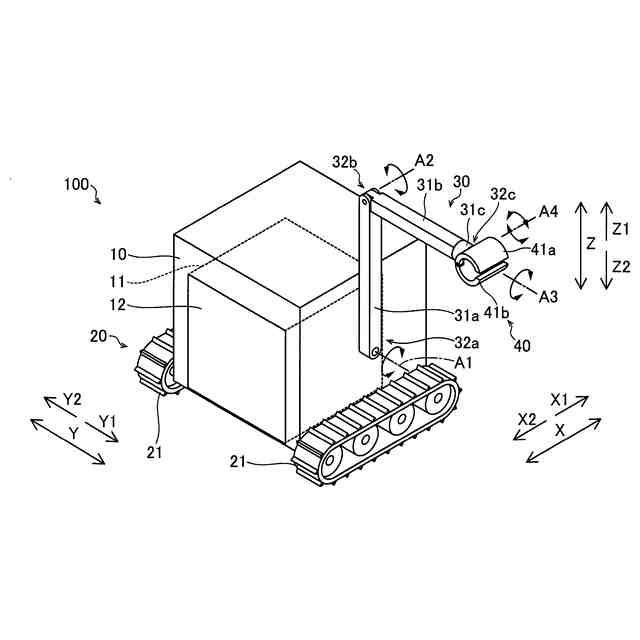
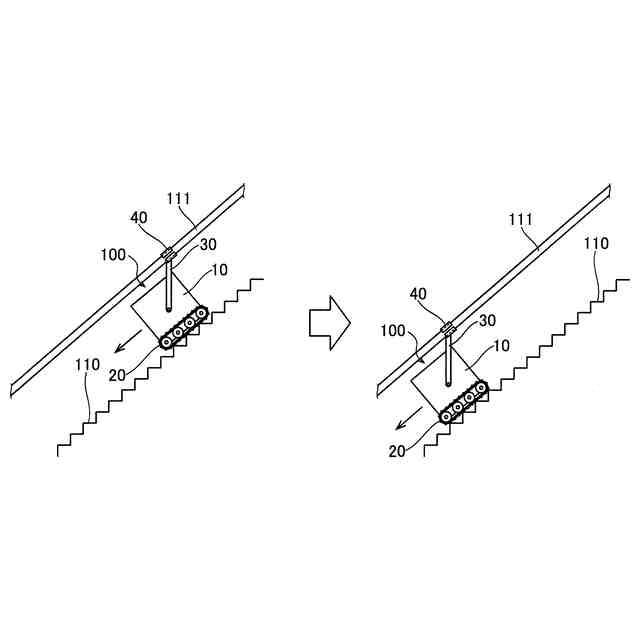
【解決手段】この段差昇降用移動装置100は、移動装置本体10と、移動装置本体10に配置され、段差110を昇降するように走行する走行部20と、移動装置本体10に配置されるアーム部30と、アーム部30の先端に配置され、走行部20により段差110を昇降する際に、段差110の傾斜に沿って配置された手すり111に係合する係合部40と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動装置本体と、
前記移動装置本体に配置され、段差を昇降するように走行する走行部と、
前記移動装置本体に配置されるアーム部と、
前記アーム部の先端に配置され、前記走行部により前記段差を昇降する際に、前記段差の傾斜に沿って配置された手すりに係合する係合部と、を備える、段差昇降用移動装置。
続きを表示(約 920 文字)
【請求項2】
前記手すりの位置に応じて、前記係合部の位置を調整する位置調整機構をさらに備える、請求項1に記載の段差昇降用移動装置。
【請求項3】
前記手すりの傾斜角度に応じて、前記係合部の姿勢を調整する姿勢調整機構をさらに備える、請求項1に記載の段差昇降用移動装置。
【請求項4】
前記手すりの位置に応じて、前記係合部の位置を調整する位置調整機構と、
前記手すりの傾斜角度に応じて、前記係合部の姿勢を調整する姿勢調整機構と、
前記手すりを検出する検出部と、
前記検出部により検出した前記手すりに基づいて、前記手すりの状態を認識し、認識した前記手すりの状態に基づいて、前記係合部の位置および姿勢を調整するように、前記位置調整機構および前記姿勢調整機構を制御する制御部と、をさらに備える、請求項1に記載の段差昇降用移動装置。
【請求項5】
前記係合部の前記手すりに対する係合力を検出する力検出部と、
前記力検出部により検出した前記係合力に基づいて、前記係合力を調整する制御を行う制御部と、をさらに備える、請求項1に記載の段差昇降用移動装置。
【請求項6】
前記係合部は、前記手すりに係合した状態で、前記走行部が前記段差を走行した場合、前記手すり上を摺動する、請求項1に記載の段差昇降用移動装置。
【請求項7】
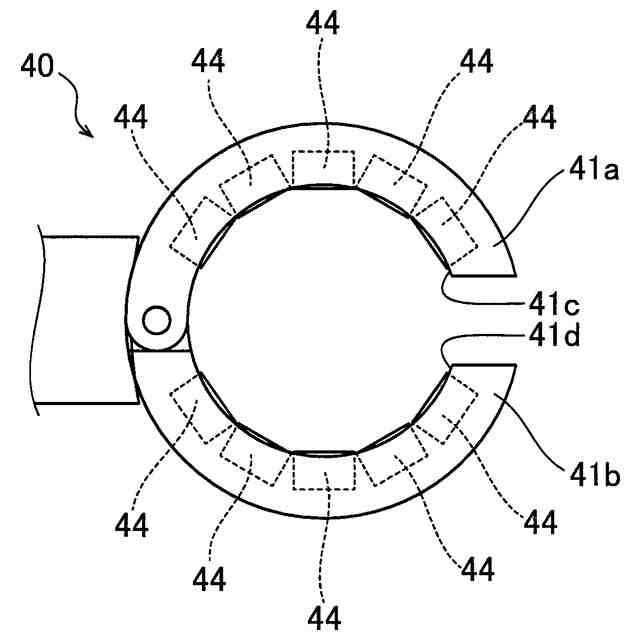
前記係合部は、前記手すりに係合する内面に、前記手すりと接触して回転可能なローラを含む、請求項6に記載の段差昇降用移動装置。
【請求項8】
前記係合部は、前記手すりを把持するハンド部である、請求項1に記載の段差昇降用移動装置。
【請求項9】
前記係合部は、前記手すりに引っ掛かるフック部である、請求項1に記載の段差昇降用移動装置。
【請求項10】
前記位置調整機構は、前記係合部が前記移動装置本体の左右方向の両側に移動することが可能なように、前記アーム部を回転させる回転機構を含む、請求項2に記載の段差昇降用移動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、段差昇降用移動装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、段差を走行する移動装置が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、階段などの段差がある移動面を移動する移動装置が開示されている。この移動装置は、本体と、本体の左右両側に配置された一対のクローラとを備えている。一対のクローラの間であって本体の一側端には、本体の一側端から突出するように移動補助アームが配置されている。移動補助アームは、移動装置が段差がある移動面を移動する際、移動面に接触して移動装置の移動を安定化させる。
【先行技術文献】
【特許文献】
【0004】
国際公開第2009/110592号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の移動装置は、単に移動補助アームが移動面に接触するだけであるため、段差の昇降時における移動装置の姿勢の安定性が不十分である。このため、段差の昇降時における段差昇降用移動装置の姿勢をより安定させることが望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、段差の昇降時における段差昇降用移動装置の姿勢をより安定させることが可能な段差昇降用移動装置を提供することである。
【課題を解決するための手段】
【0007】
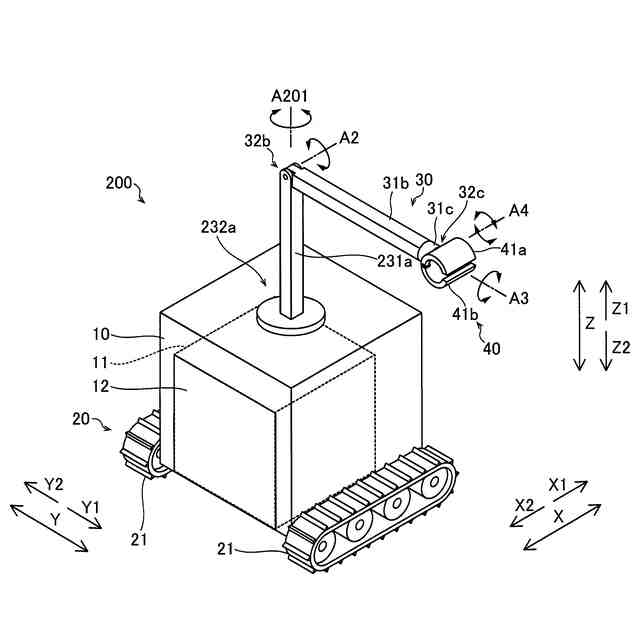
この開示の一の局面による段差昇降用移動装置は、移動装置本体と、移動装置本体に配置され、段差を昇降するように走行する走行部と、移動装置本体に配置されるアーム部と、アーム部の先端に配置され、走行部により段差を昇降する際に、段差の傾斜に沿って配置された手すりに係合する係合部と、を備える。
【0008】
この開示の一の局面による段差昇降用移動装置では、上記のように、移動装置本体に配置されるアーム部と、アーム部の先端に配置され、走行部により段差を昇降する際に、段差の傾斜に沿って配置された手すりに係合する係合部と、を設ける。これにより、段差の傾斜に沿って配置された手すりに係合する係合部により、段差の昇降時における段差昇降用移動装置の姿勢のバランスを維持することができる。その結果、単に段差にアームを接触させるだけの場合に比べて、段差の昇降時における段差昇降用移動装置の姿勢をより安定させることができる。
【発明の効果】
【0009】
本開示によれば、上記のように、段差の昇降時における段差昇降用移動装置の姿勢をより安定させることができる。
【図面の簡単な説明】
【0010】
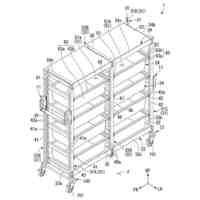
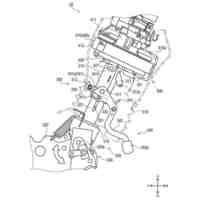
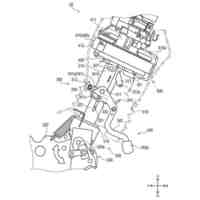
第1実施形態による段差昇降用移動装置を示した斜視図である。
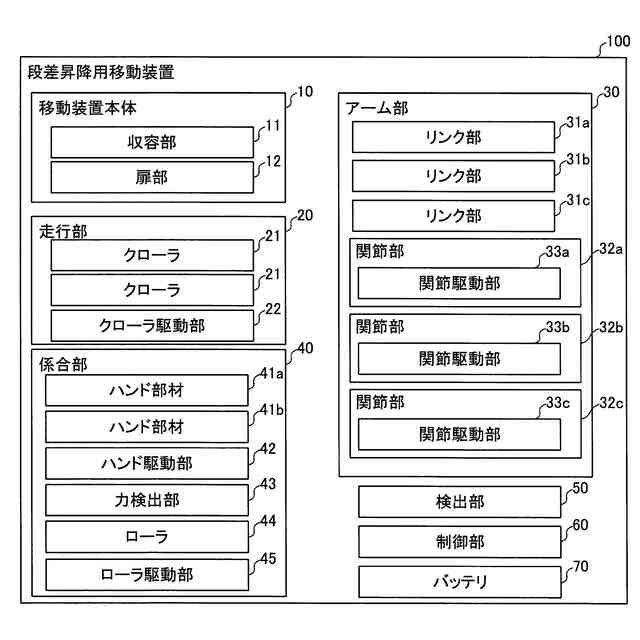
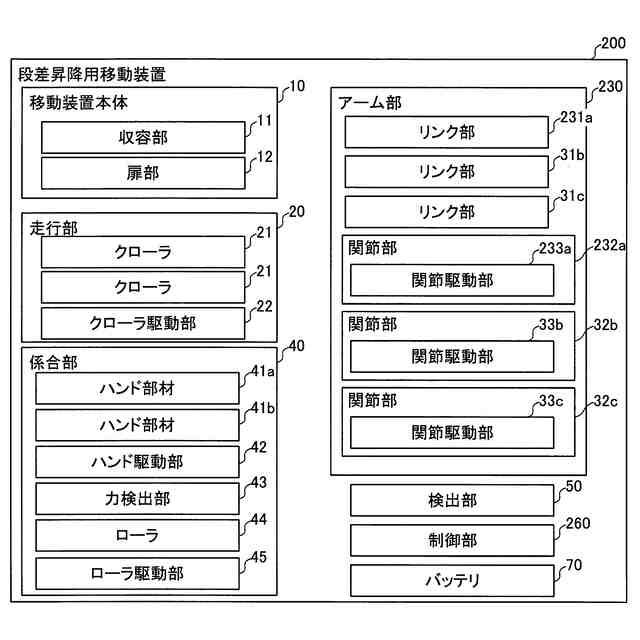
第1実施形態による段差昇降用移動装置を示したブロック図である。
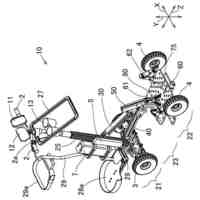
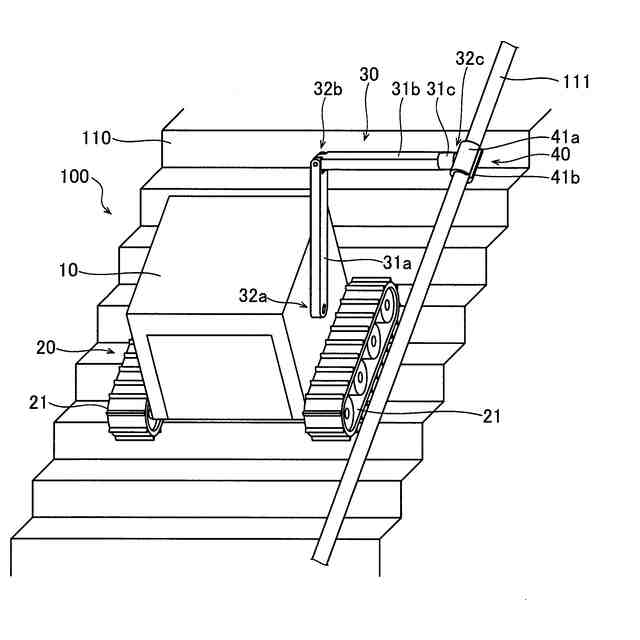
第1実施形態による段差昇降用移動装置が段差を走行する状態を示した斜視図である。
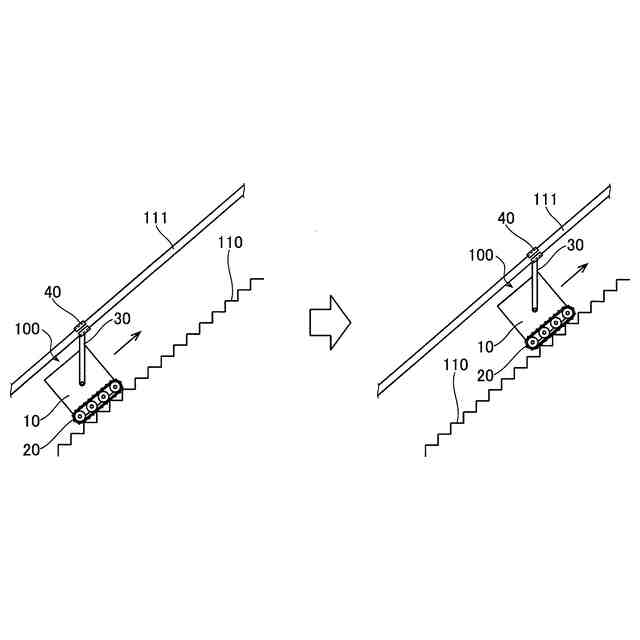
第1実施形態による段差昇降用移動装置が段差を昇る動作を示した図である。
第1実施形態による段差昇降用移動装置が段差を降る動作を示した図である。
第1実施形態による係合部を示した側面図である。
第1実施形態による段差昇降用移動装置の段差の移動に関する制御処理を説明するための図である。
第2実施形態による段差昇降用移動装置を示した斜視図である。
第2実施形態による段差昇降用移動装置を示したブロック図である。
第3実施形態による段差昇降用移動装置を示した斜視図である。
第3実施形態による段差昇降用移動装置を示したブロック図である。
第3実施形態による段差昇降用移動装置が階段を走行する状態を示した斜視図である。
手すりの支持部を説明するための図である。
変形例によるアーム部を示した側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗り物
1か月前
個人
折り畳み自転車
6か月前
個人
電動モビリティ
3か月前
個人
発音装置
3か月前
個人
自転車用傘捕捉具
7か月前
個人
自由方向乗車自転車
3か月前
個人
自転車用荷台
10か月前
個人
体重掛けリフト台車
6か月前
個人
自転車用荷物台
7か月前
個人
キャンピングトライク
4か月前
個人
アタッチメント
7か月前
個人
ステアリングの操向部材
10か月前
個人
ステアリングの操向部材
4か月前
株式会社CPM
駐輪機
7か月前
祖峰企画株式会社
平台車
11か月前
株式会社三五
リアサブフレーム
6か月前
三甲株式会社
台車
9か月前
株式会社豊田自動織機
産業車両
12日前
三甲株式会社
台車
9か月前
学校法人千葉工業大学
車両
5か月前
豊田合成株式会社
操舵装置
8か月前
ヤマハ発動機株式会社
車両
8か月前
ダイハツ工業株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
学校法人千葉工業大学
車両
5か月前
学校法人千葉工業大学
車両
5か月前
ヤマハ発動機株式会社
車両
8か月前
個人
ホイールハブ駆動構造
9日前
トヨタ自動車株式会社
パネル
12日前
ヤマハ発動機株式会社
自転車
3日前
株式会社オカムラ
搬送用什器
3か月前
株式会社カインズ
台車
3か月前
株式会社クボタ
作業車
11か月前
株式会社クボタ
作業車
11か月前
株式会社GEAR
電動カート
19日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ