TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068459
公報種別
公開特許公報(A)
公開日
2025-04-28
出願番号
2023178399
出願日
2023-10-16
発明の名称
廃棄物処理システム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B07C
5/10 20060101AFI20250421BHJP(固体相互の分離;仕分け)
要約
【課題】装置点数が増加するのを抑制することができるとともに、システム構成が複雑になるのを抑制することが可能な廃棄物処理システムを提供する。
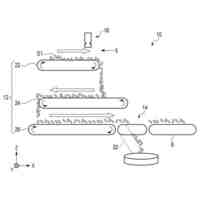
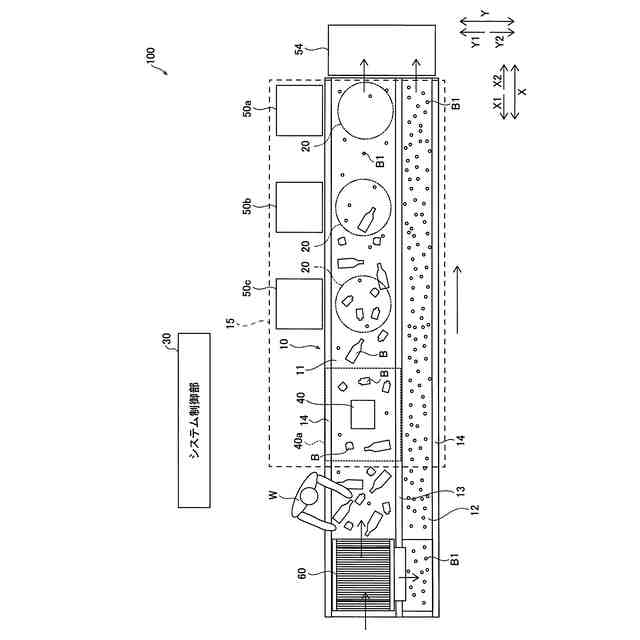
【解決手段】この廃棄物処理システム100は、大きいサイズの廃棄物を搬送する第1搬送部分11と、第1搬送部分11とは幅方向における異なる位置において小さいサイズの廃棄物を搬送する第2搬送部分12と、を含む搬送部10と、搬送部10により搬送される廃棄物を撮像する撮像部40と、撮像部40により撮像した廃棄物の画像に基づいて、搬送部10により搬送される大きいサイズの廃棄物を仕分けするロボット20と、撮像部40よりも上流に位置し、大きいサイズの廃棄物を第1搬送部分11に仕分け、小さいサイズの廃棄物を第2搬送部分12に仕分ける前仕分け機構部60と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
大きいサイズの廃棄物を搬送する第1搬送部分と、前記第1搬送部分とは幅方向における異なる位置において小さいサイズの廃棄物を搬送する第2搬送部分と、を含む搬送部と、
前記搬送部により搬送される廃棄物を撮像する撮像部と、
前記撮像部により撮像した廃棄物の画像に基づいて、前記搬送部により搬送される前記大きいサイズの廃棄物を仕分けするロボットと、
前記撮像部よりも上流に位置し、前記大きいサイズの廃棄物を前記第1搬送部分に仕分け、前記小さいサイズの廃棄物を前記第2搬送部分に仕分ける前仕分け機構部と、を備える、廃棄物処理システム。
続きを表示(約 1,200 文字)
【請求項2】
前記搬送部の前記第1搬送部分と前記第2搬送部分とを仕切る仕切部材を備える、請求項1に記載の廃棄物処理システム。
【請求項3】
前記搬送部は、前記ロボットにより仕分けられなかった廃棄物の残りを、前記第1搬送部分により残渣収容部に搬送し、前記前仕分け機構部により仕分けられた小さいサイズの廃棄物を、前記第2搬送部分により前記残渣収容部に搬送する、請求項1に記載の廃棄物処理システム。
【請求項4】
前記撮像部は、前記第1搬送部分により搬送される前記大きいサイズの廃棄物を撮像する、請求項1に記載の廃棄物処理システム。
【請求項5】
前記前仕分け機構部は、前記小さいサイズの廃棄物が通過する隙間を有する、可動式または固定式の篩を含む、請求項1に記載の廃棄物処理システム。
【請求項6】
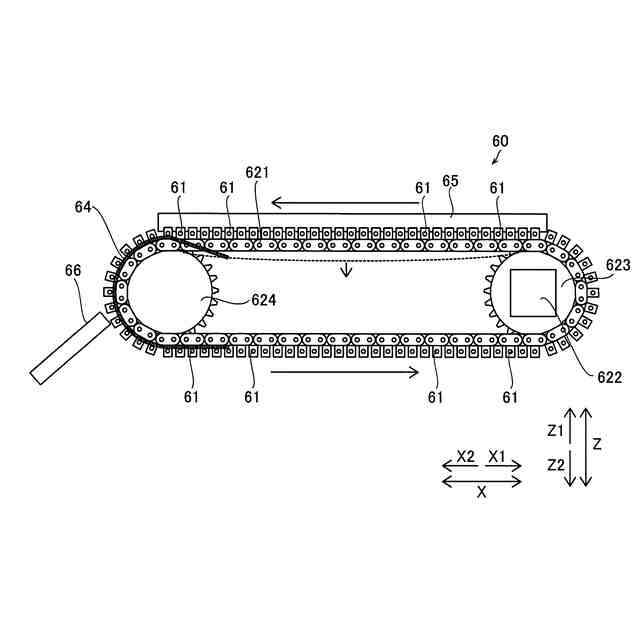
前記前仕分け機構部は、廃棄物を前記第1搬送部分に仕分けする搬送方向に沿って所定の隙間を隔てて配置されている複数のバーと、前記搬送方向に複数のバーを移動させるとともに、前記搬送方向に前記複数のバーを移動させる部分の下方において前記搬送方向とは反対方向に前記複数のバーを移動させて、前記複数のバーを周回駆動させるバー駆動部と、前記複数のバーを前記搬送方向に移動させる部分の下方に配置され、前記複数のバーの隙間から落下した前記小さいサイズの廃棄物を前記第2搬送部分に導くように傾斜するスロープと、を含む、請求項5に記載の廃棄物処理システム。
【請求項7】
前記前仕分け機構部の前記バー駆動部は、前記複数のバーの両端を支持する一対のチェーンを有し、前記一対のチェーンは、前記搬送方向に移動する部分の前記複数のバーを支持する部分が下方に撓むことが可能である、請求項6に記載の廃棄物処理システム。
【請求項8】
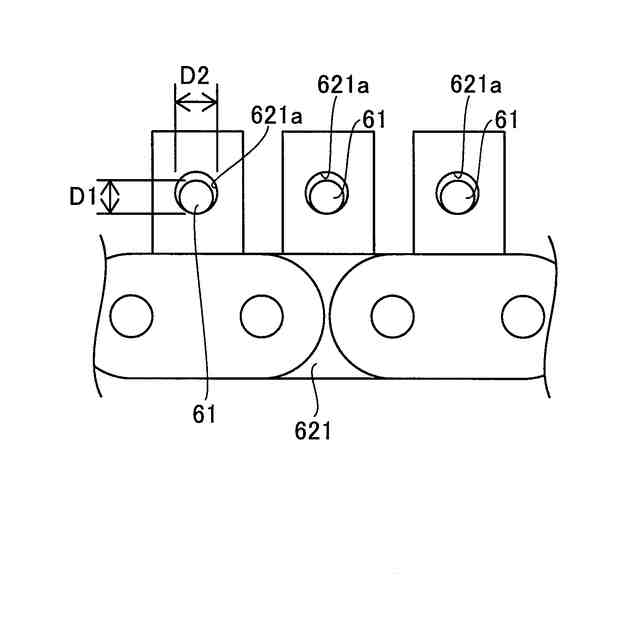
前記チェーンは、前記複数のバーを前記搬送方向および上下方向に移動可能なように遊びを有して前記複数のバーを支持している、請求項7に記載の廃棄物処理システム。
【請求項9】
前記前仕分け機構部は、前記搬送方向に前記複数のバーを移動させる部分の下流側の前記周回駆動する前記複数のバーの内周側に配置され、前記複数のバーの移動方向に沿って湾曲する板状部材を含み、
前記板状部材は、前記搬送方向に前記複数のバーを移動させる部分の下流に向かって、前記複数のバーとの距離が小さくなる形状を有している、請求項6に記載の廃棄物処理システム。
【請求項10】
前記前仕分け機構部は、前記搬送方向に直交する水平方向のバー長手方向の両方の外側に配置され、前記複数のバーの前記バー長手方向を覆うコンベアスカートを含む、請求項6に記載の廃棄物処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
廃棄物処理システムに関し、特に、廃棄物の仕分けを行うロボットを備える廃棄物処理システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、廃棄物の仕分けを行うロボットを備える廃棄物処理システムが知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、廃棄物を搬送する搬送部と、搬送部により搬送される廃棄物の映像を撮像する撮像部と、撮像部の撮像に基づいて、搬送部により搬送される廃棄物の仕分けを行うロボットと、撮像部よりも上流において、所定の大きさ以下の廃棄物を篩い落とし、所定の大きさよりも大きい廃棄物を搬送部に供給する振動篩装置と、を備える廃棄物処理システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-109197号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1の廃棄物処理システムでは、振動篩装置は、撮像部よりも上流において、所定の大きさ以下の廃棄物を篩い落とし、所定の大きさよりも大きい廃棄物を搬送部に供給する。そのため、振動篩装置により篩い落とした所定の大きさ以下の廃棄物を仕分け先に搬送する搬送部が別途必要になる。このため、廃棄物処理システムの装置点数が増加するとともに、システム構成が複雑になるという問題点がある。
【0006】
上記のような課題を解決するためになされたものであり、1つの目的は、廃棄物処理システムの装置点数が増加するのを抑制することが可能であるとともに、システム構成が複雑になるのを抑制することが可能な廃棄物処理システムを提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するために、一の局面による廃棄物処理システムは、大きいサイズの廃棄物を搬送する第1搬送部分と、第1搬送部分とは幅方向における異なる位置において小さいサイズの廃棄物を搬送する第2搬送部分と、を含む搬送部と、搬送部により搬送される廃棄物を撮像する撮像部と、撮像部により撮像した廃棄物の画像に基づいて、搬送部により搬送される大きいサイズの廃棄物を仕分けするロボットと、撮像部よりも上流に位置し、大きいサイズの廃棄物を第1搬送部分に仕分け、小さいサイズの廃棄物を第2搬送部分に仕分ける前仕分け機構部と、を備える。
【0008】
一の局面による廃棄物処理システムでは、上記のように、大きいサイズの廃棄物を搬送する第1搬送部分と、第1搬送部分とは幅方向における異なる位置において小さいサイズの廃棄物を搬送する第2搬送部分と、を含む搬送部と、撮像部よりも上流に位置し、大きいサイズの廃棄物を第1搬送部分に仕分け、小さいサイズの廃棄物を第2搬送部分に仕分ける前仕分け機構部と、を設ける。これにより、ロボットの仕分け前に前仕分け機構部により仕分けた小さいサイズの廃棄物を、ロボットにより仕分ける大きいサイズの廃棄物と共通の搬送部により搬送することができる。その結果、前仕分け機構部により仕分けた小さいサイズの廃棄物を搬送するための搬送部を別途設ける必要がない。これにより、廃棄物処理システムの装置点数が増加するのを抑制することができるとともに、システム構成が複雑になるのを抑制することができる。
【発明の効果】
【0009】
上記のように、廃棄物処理システムの装置点数が増加するのを抑制することができるとともに、システム構成が複雑になるのを抑制することができる。
【図面の簡単な説明】
【0010】
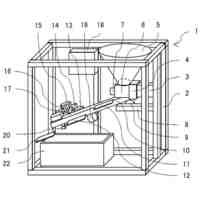
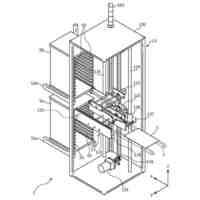
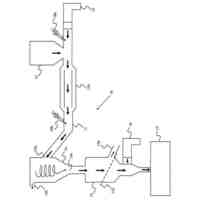
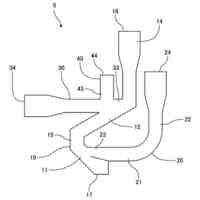
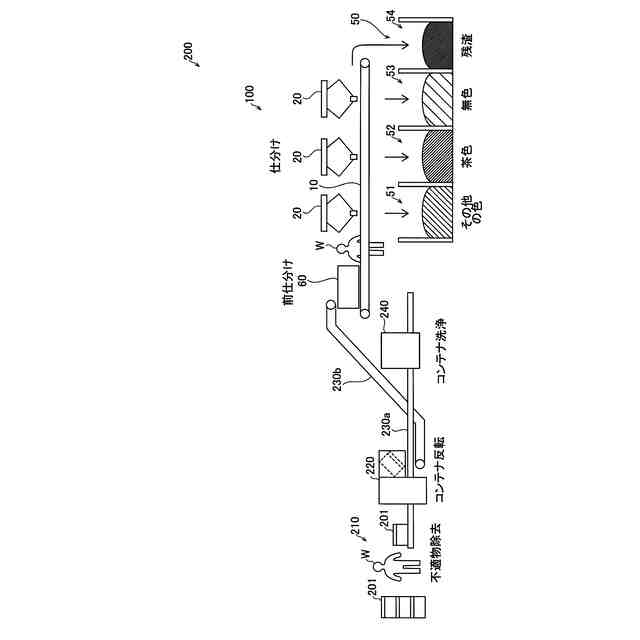
一実施形態による廃棄物処理システムが設けられた廃棄物処理施設の全体構成を示した図である。
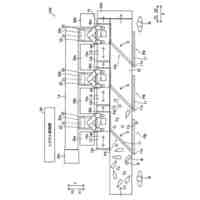
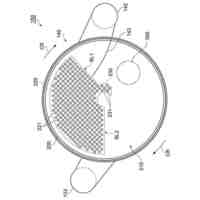
一実施形態による廃棄物処理システムの概略を示した平面図である。
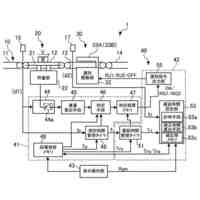
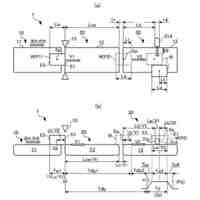
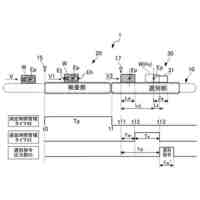
一実施形態による廃棄物処理システムの制御的な構成を示したブロック図である。
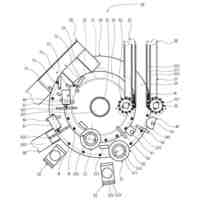
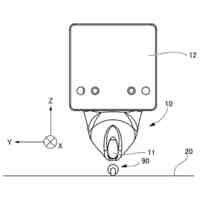
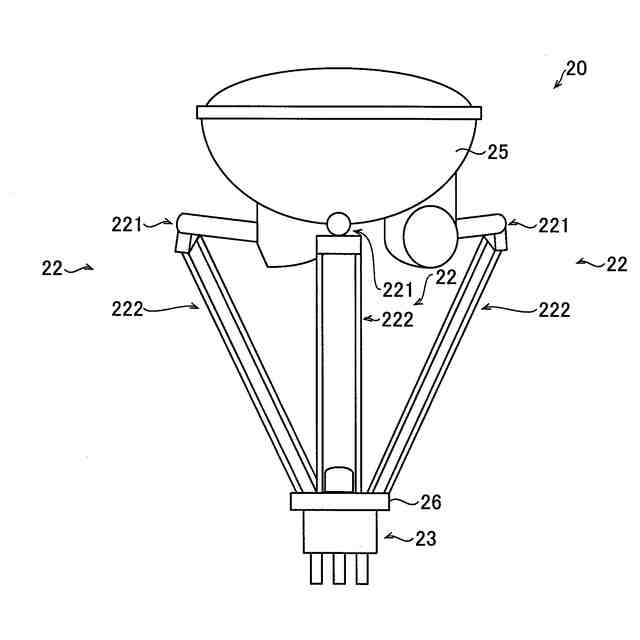
一実施形態による廃棄物処理システムのロボットを示した側面図である。
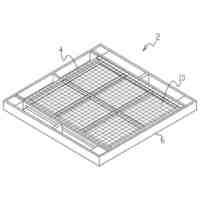
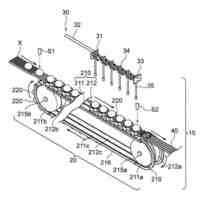
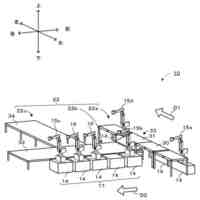
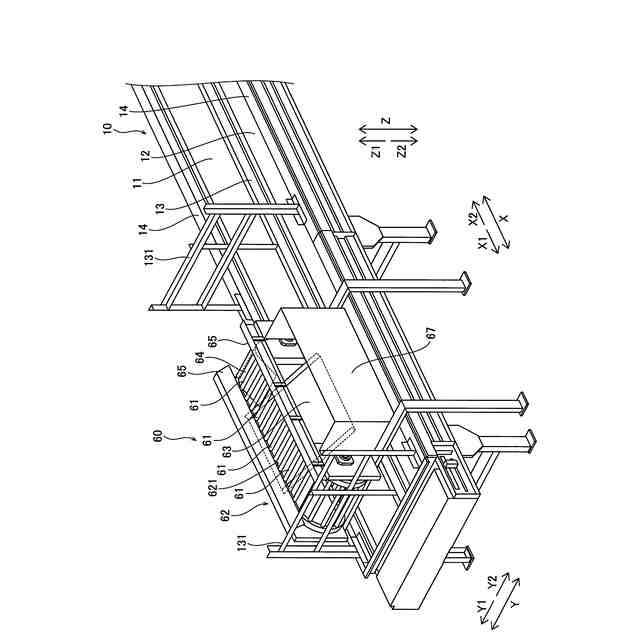
一実施形態による廃棄物処理システムの前仕分け機構部を示した斜視図である。
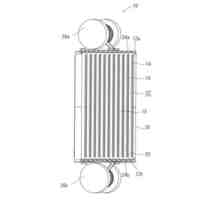
一実施形態による廃棄物処理システムの前仕分け機構部の一部を示した側面図である。
一実施形態による廃棄物処理システムの前仕分け機構部のチェーンおよびバーを示した側面図である。
一実施形態の変形例による廃棄物処理システムの概略を示した平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
穀物選別機
4か月前
日清製粉株式会社
篩
2か月前
日東精工株式会社
検査装置
3か月前
個人
ゴミ分別システム
1か月前
株式会社タケエイ
振動篩装置
2か月前
株式会社レクザム
基板アンローダ
3か月前
川崎重工業株式会社
廃棄物処理システム
3か月前
コネクテッドロボティクス株式会社
処理方法
1か月前
キヤノン株式会社
分別装置及び分別方法
2か月前
アンリツ株式会社
物品検査装置
3か月前
アンリツ株式会社
物品検査装置
3か月前
キヤノン株式会社
分別装置及び分別方法
4か月前
東芝ライテック株式会社
搬送システム
3か月前
株式会社シンセイ
砂乾燥選別装置
2か月前
日本協同企画株式会社
果菜引継ぎ搬送装置及び果菜箱詰め装置
1か月前
株式会社山本工作所
空気分散部材及び乾式分離装置
1か月前
株式会社 東京ウエルズ
ワーク分類装置、ワーク分類方法
1か月前
アンリツ株式会社
選別装置および物品検査装置
3か月前
アンリツ株式会社
選別装置および物品検査装置
1か月前
株式会社PFU
物体撮像装置および物体認識装置
2か月前
ウエノテックス株式会社
風力選別機および風力選別システム
3か月前
キヤノン株式会社
識別装置
3か月前
UBE三菱セメント株式会社
長尺物の篩い分け方法、焼却灰の処理方法、及び、振動篩機
29日前
株式会社FUJI
異物除去方法
26日前
個人
複素環式THR-β受容体アゴニスト化合物ならびにその調製方法および使用
2か月前
リジェネックスバイオ インコーポレイテッド
完全ヒト翻訳後修飾抗体による治療剤
1か月前
他の特許を見る




 特許ウォッチ
特許ウォッチ