TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025090284
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205430
出願日
2023-12-05
発明の名称
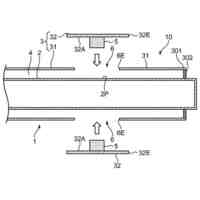
パイプシューガイド
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
F16L
3/08 20060101AFI20250610BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】パイプシューのベースプレートに対するギャップを容易に調整することができるパイプシューガイドを提供する。
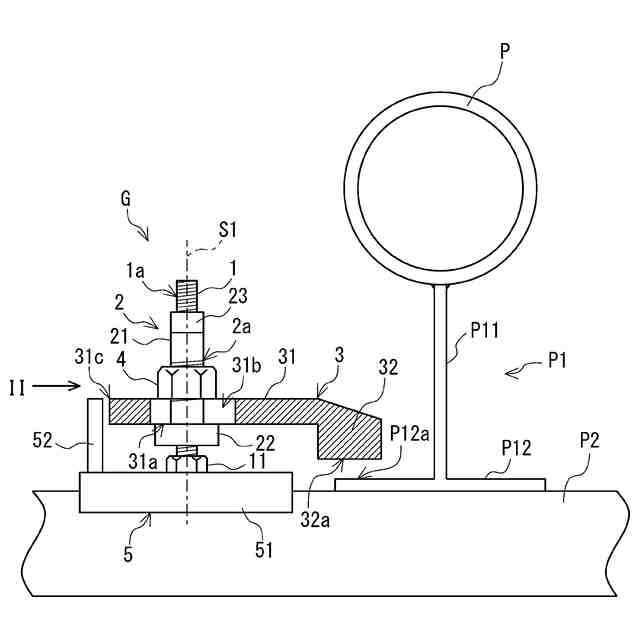
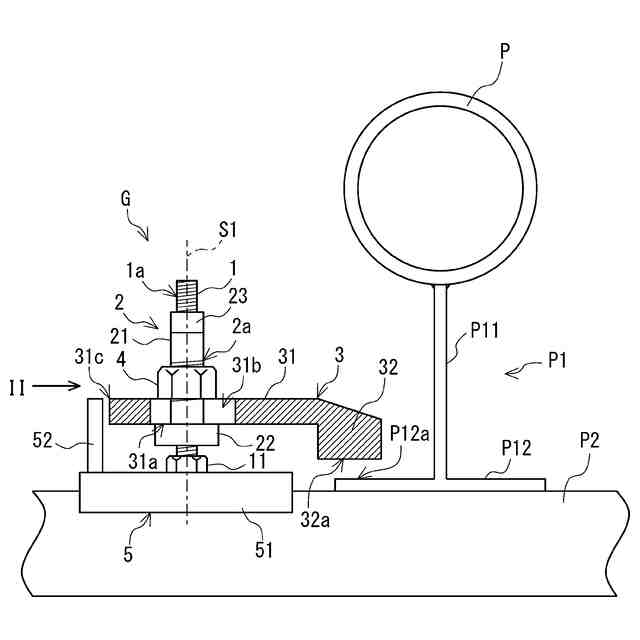
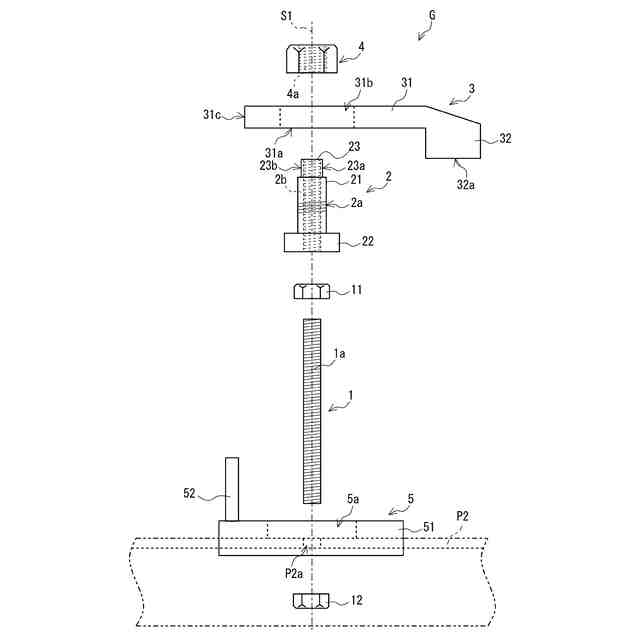
【解決手段】第2ピースは、内周面の少なくとも一部に第1ピースの雄ねじと螺合する雌ねじを有し、外周面の少なくとも一部に雄ねじを有するシリンダと、シリンダの下端からシリンダの径方向に延びるフランジと、シリンダの上端に接続され、所定の工具で係合可能なアジャスタと、を含む。第3ピースは、フランジへの設置面を有するプレート部と、プレート部に接続され、ベースプレートの上面に対向配置される対向面を有するヘッド部と、を含み、プレート部は、シリンダが挿通可能かつフランジが挿通不能な穴を有する。第4ピースは、シリンダの雄ねじに螺合する雌ねじを有し、プレート部の穴にシリンダが挿通され、設置面がフランジに当接した状態で、第4ピースがシリンダに螺合されることにより、第3ピースが第2ピースに固定される。
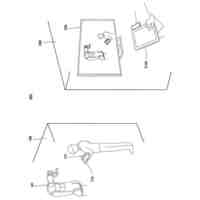
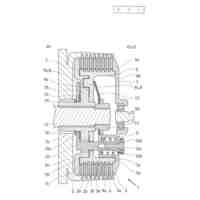
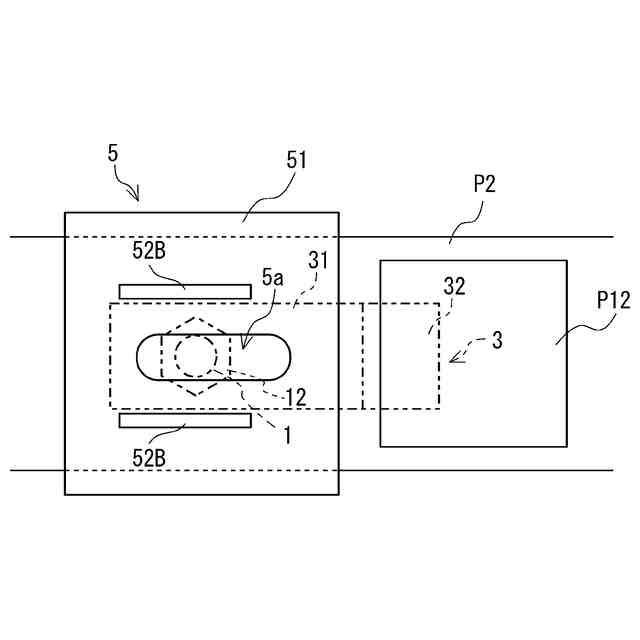
【選択図】図1
特許請求の範囲
【請求項1】
配管を支持するシュー本体と、前記シュー本体をサポートに設置するためのベースプレートと、を含むパイプシューをガイドするためのパイプシューガイドであって、
前記パイプシューが設置される前記サポートに基端が支持され、前記サポートに交差する第1軸方向に延び、前記基端と先端との間の少なくとも一部の外周面に雄ねじを有する棒状の第1ピースと、
前記第1ピースに螺合される第2ピースと、
前記ベースプレートの上面に対向配置される第3ピースと、
前記第3ピースを前記第2ピースに固定する第4ピースと、を備え、
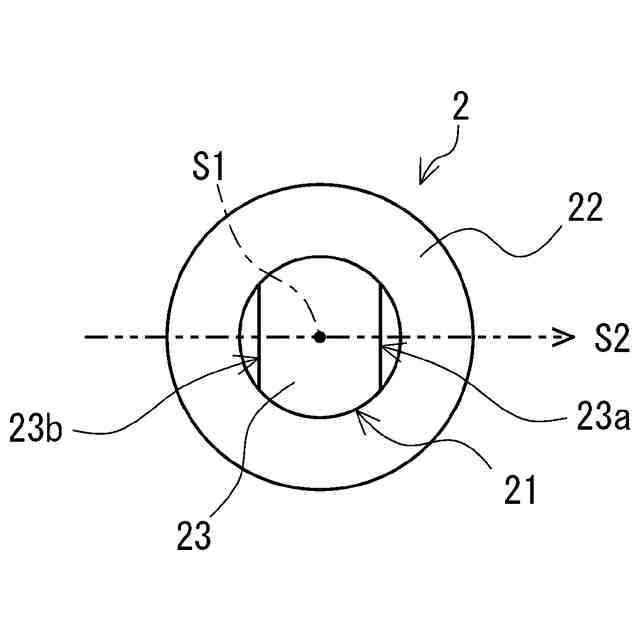
前記第2ピースは、内周面の少なくとも一部に前記第1ピースの雄ねじと螺合する雌ねじを有し、外周面の少なくとも一部に雄ねじを有するシリンダと、前記シリンダの下端から前記シリンダの径方向に延びるフランジと、前記シリンダの上端に接続され、所定の工具で係合可能なアジャスタと、を含み、
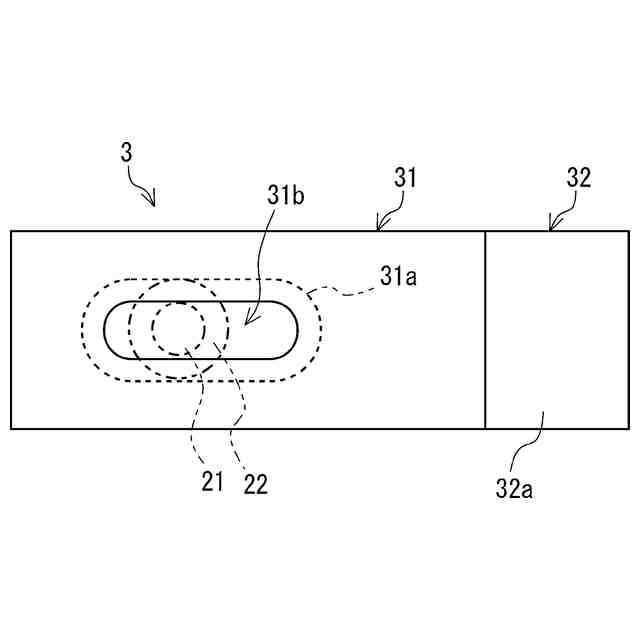
前記第3ピースは、前記フランジへの設置面を有するプレート部と、前記プレート部に接続され、前記ベースプレートの上面に対向配置される対向面を有するヘッド部と、を含み、
前記プレート部は、前記シリンダが挿通可能かつ前記フランジが挿通不能な穴を有し、
前記第4ピースは、前記シリンダの雄ねじに螺合する雌ねじを有し、
前記プレート部の穴に前記シリンダが挿通され、前記設置面が前記フランジに当接した状態で、前記第4ピースが前記シリンダに螺合されることにより、前記第3ピースが前記第2ピースに固定され、
前記第2ピースの雌ねじの前記第1ピースの雄ねじに対するねじ込み量に応じて前記第3ピースの前記対向面と前記ベースプレートの上面との距離を調整可能である、パイプシューガイド。
続きを表示(約 390 文字)
【請求項2】
前記プレート部の穴は、前記ヘッド部に向けて長い長穴形状を有している、請求項1に記載のパイプシューガイド。
【請求項3】
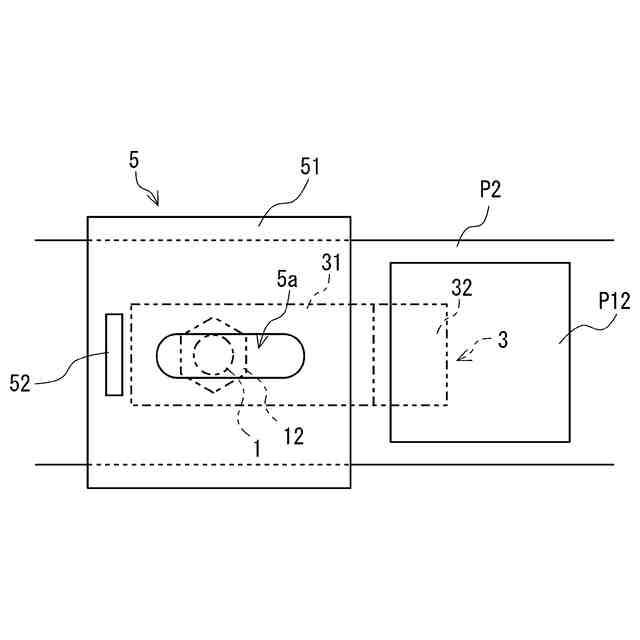
前記サポート上に設置され、前記第1ピースとともに前記サポートに固定される第5ピースを備え、
前記第5ピースは、前記サポート上に設置されるベース部と、前記ベース部から前記第1軸方向に延び、前記第3ピースの前記第1軸回りの回動を防止する回り止め部と、を含む、請求項1または2に記載のパイプシューガイド。
【請求項4】
前記ベース部は、前記第1ピースが挿通可能な穴を有し、
前記ベース部の穴は、長穴形状を有している、請求項3に記載のパイプシューガイド。
【請求項5】
前記アジャスタは、前記第1軸に直交する第2軸に垂直な一対の面取り面を有する、請求項1または2に記載のパイプシューガイド。
発明の詳細な説明
【技術分野】
【0001】
本開示は、パイプシューをガイドするためのパイプシューガイドに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
プラント配管等の配管をサポートに支持させるためにパイプシューが用いられる。パイプシューは、配管を支持するシュー本体と、シュー本体をサポートに設置するためのベースプレートと、を含む。さらに、配管の軸に直角な方向の移動を制限するために、ベースプレートをガイドするパイプシューガイドが用いられる。
【0003】
従来においては、例えばL型鋼等の鋼材がパイプシューガイドとしてサポートのベースプレート設置箇所近傍に溶接により固定されていた。配管が熱膨張により変位する場合があるため、パイプシューガイドは、当該変位を過剰に妨げないように、ベースプレートに対して少なくともサポートに直交する方向に関して所定のギャップを有するように固定される必要がある。
【0004】
しかし、従来のようにパイプシューガイドが固定されていると、配管の変位によりギャップ量が変化してしまう。また、溶接により固定する際に溶接歪みが発生する恐れがあり、適切なギャップ量となる位置にパイプシューガイドを固定することが難しい。
【0005】
ここで、ワークを把持する技術として、下記特許文献1には、ワークをクランプするクランプ装置において、クランププレートを下方から支持する支持部材の長さを、支持部材を構成するボルトとナットとの締め付け量によって変化させることでクランププレートの高さ位置を変更可能な構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2004-154821号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記特許文献1の構成では、高さ調節のためにスパナ等の工具をクランププレートの下から差し入れる必要がある。このため、支持部材を構成するボルトおよびナットが目視できない状態での作業となる。したがって、このような構成をパイプシューガイドに適用するにしても、作業性に関して改善の余地がある。
【0008】
本開示は、パイプシューのベースプレートに対するギャップを容易に調整することができるパイプシューガイドを提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の一態様に係るパイプシューガイドは、配管を支持するシュー本体と、前記シュー本体をサポートに設置するためのベースプレートと、を含むパイプシューをガイドするためのパイプシューガイドであって、前記パイプシューが設置される前記サポートに基端が支持され、前記サポートに交差する第1軸方向に延び、前記基端と先端との間の少なくとも一部の外周面に雄ねじを有する棒状の第1ピースと、前記第1ピースに螺合される第2ピースと、前記ベースプレートの上面に対向配置される第3ピースと、前記第3ピースを前記第2ピースに固定する第4ピースと、を備え、前記第2ピースは、内周面の少なくとも一部に前記第1ピースの雄ねじと螺合する雌ねじを有し、外周面の少なくとも一部に雄ねじを有するシリンダと、前記シリンダの下端から前記シリンダの径方向に延びるフランジと、前記シリンダの上端に接続され、所定の工具で係合可能なアジャスタと、を含み、前記第3ピースは、前記フランジへの設置面を有するプレート部と、前記プレート部に接続され、前記ベースプレートの上面に対向配置される対向面を有するヘッド部と、を含み、前記プレート部は、前記シリンダが挿通可能かつ前記フランジが挿通不能な穴を有し、前記第4ピースは、前記シリンダの雄ねじに螺合する雌ねじを有し、前記プレート部の穴に前記シリンダが挿通され、前記設置面が前記フランジに当接した状態で、前記第4ピースが前記シリンダに螺合されることにより、前記第3ピースが前記第2ピースに固定され、前記第2ピースの雌ねじの前記第1ピースの雄ねじに対するねじ込み量に応じて前記第3ピースの前記対向面と前記ベースプレートの上面との距離を調整可能である。
【発明の効果】
【0010】
本開示によれば、パイプシューのベースプレートに対するギャップを容易に調整することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ロボット
19日前
川崎重工業株式会社
養殖設備
1か月前
川崎重工業株式会社
燃料供給設備
18日前
川崎重工業株式会社
液化ガス運搬船
18日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
基板製造システム
1か月前
川崎重工業株式会社
液化水素用蒸発器
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
パイプシューガイド
1か月前
川崎重工業株式会社
GHG排出量推定装置
19日前
川崎重工業株式会社
低温流体移送用二重配管
1か月前
川崎重工業株式会社
プロペラダクトの支持構造
28日前
川崎重工業株式会社
二重管の製造方法および二重管
1か月前
川崎重工業株式会社
養殖設備及び溶存酸素濃度調整方法
1か月前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1か月前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
3日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
18日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
18日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
27日前
川崎重工業株式会社
操船支援システム、操船支援方法、及び、操船支援プログラム
1か月前
川崎重工業株式会社
情報処理装置
11日前
川崎重工業株式会社
固体吸収材ならびにそれを用いた酸性ガスの吸収および脱離方法
1か月前
川崎重工業株式会社
駅構内保守システム、駅構内保守方法、及び駅構内保守プログラム
1か月前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
19日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
19日前
川崎重工業株式会社
二重管接続構造、接続システムおよび二重管接続構造のシール材交換方法
1か月前
川崎重工業株式会社
店舗業務支援システム、店舗業務支援方法、及び店舗業務支援プログラム
1か月前
川崎重工業株式会社
ロボットシステム及びその制御方法
1か月前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
25日前
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
11日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
25日前
個人
流路体
6か月前
個人
ホース保持具
3か月前
個人
保持機
9か月前
個人
クラッチ装置
6か月前
個人
差動歯車用歯形
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ