TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087762
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2025030554,2020215576
出願日
2025-02-27,2020-12-24
発明の名称
ロボットシステム及びその制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
19/06 20060101AFI20250603BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの操作の主体を明確にして、ロボットが動作するときの安全性についても充分に担保することができる、ロボットシステムを提供する。
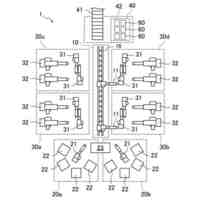
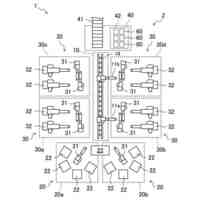
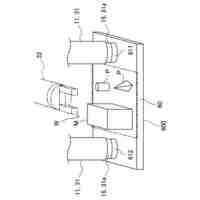
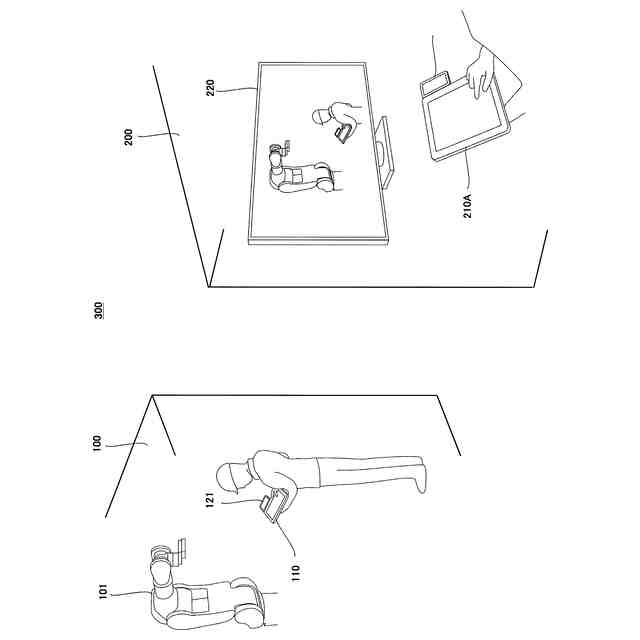
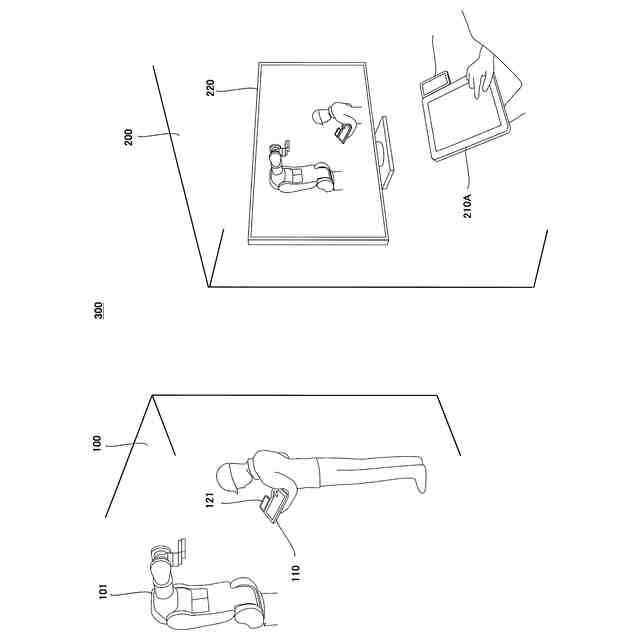
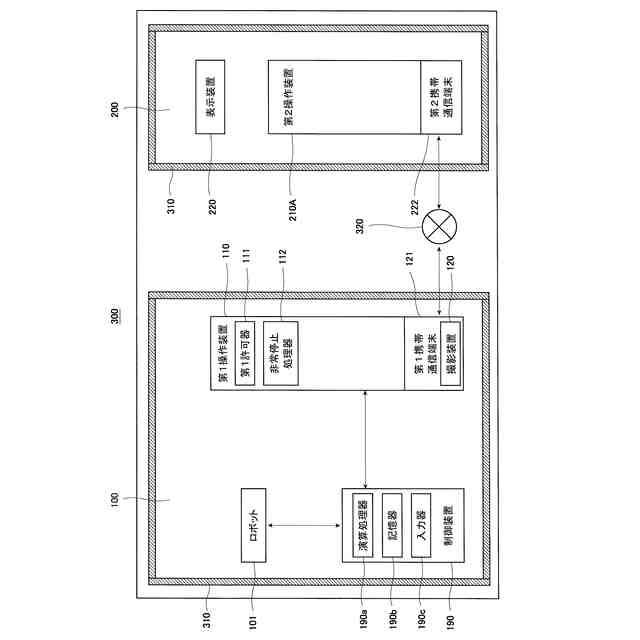
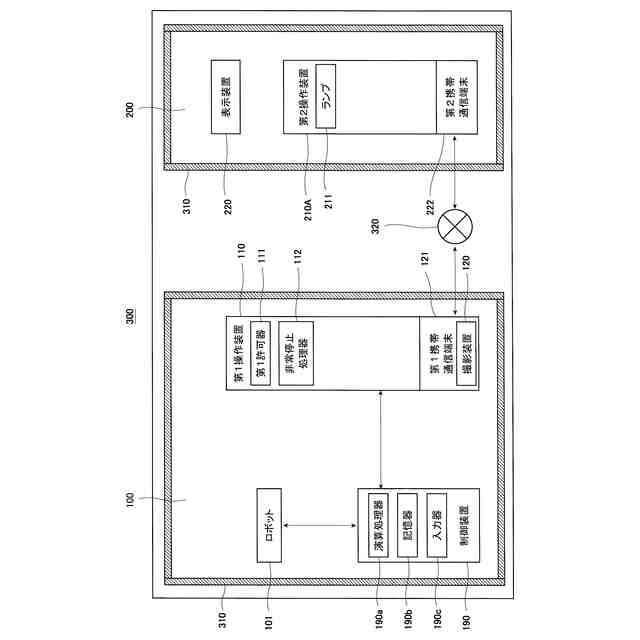
【解決手段】ロボットシステムは、第1空間100内に配置されているロボット101と、第2空間200内に配置されている第2操作装置210Aと、第1空間100内に配置され、第2操作装置210Aから制御装置への操作情報の実行許可をオン/オフするように構成されている、第1許可器を備える、第1操作装置110と、第1操作者の操作により、第1許可器が、操作情報の実行を許可している場合には、第2操作者により、操作装置210から入力された操作情報を基にロボット101を動作させるように構成されている、制御装置と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1空間内に配置されているロボットと、
前記第1空間内に配置され、操作情報が出力されるように構成されている第1操作装置と、
前記第1空間から隔離された空間である、第2空間内に配置され、前記操作情報が出力されるように構成されている第2操作装置と、
制御装置と、を備え、
前記第1操作装置は、前記第2操作装置から前記制御装置への前記操作情報の実行許可をオン/オフするように構成されている、第1許可器を備え、
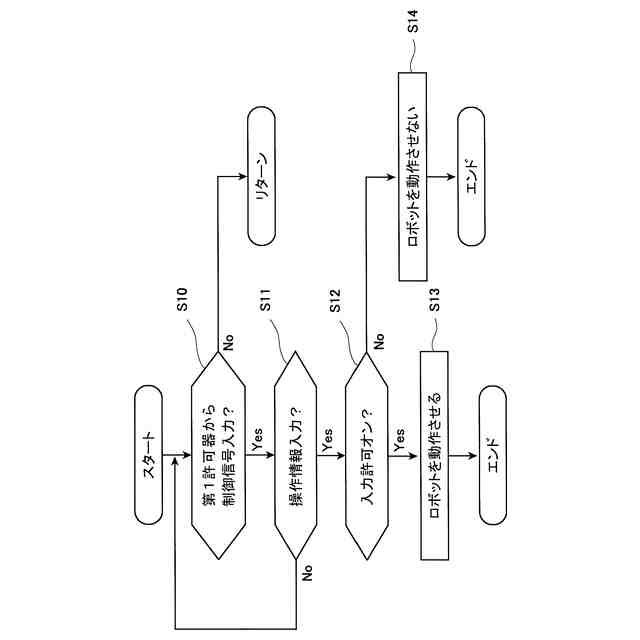
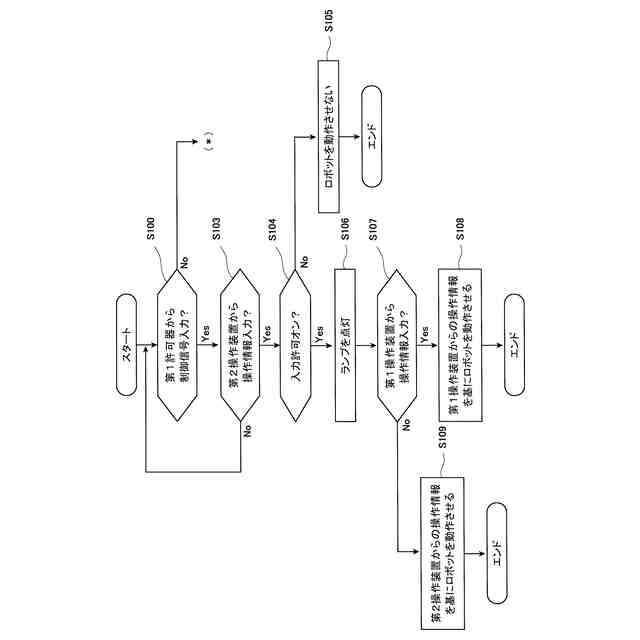
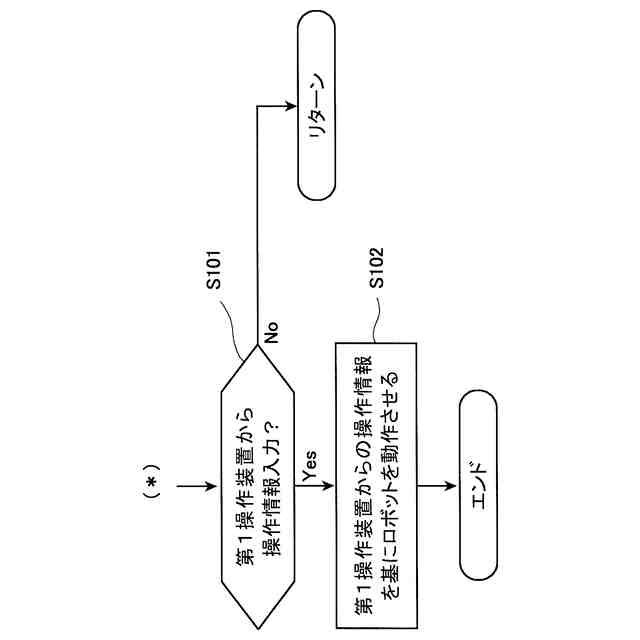
前記制御装置は、第1操作者の操作により、前記第1許可器が、前記操作情報の実行を許可している場合には、第2操作者の操作により、前記第2操作装置から入力された前記操作情報を基に前記ロボットを動作させ、
前記第1操作者の操作により、前記第1許可器が、前記操作情報の実行を許可していない場合には、前記第2操作者の操作により、前記第2操作装置から前記操作情報が入力されても、当該操作情報を基に前記ロボットを動作させないように構成されている、ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記ロボットシステムは、
前記第1空間内に配置されている撮影装置と、
前記第2空間内に配置され、前記撮影装置が撮影した映像情報又は画像情報を表示するように構成されている表示装置と、をさらに備える、請求項1に記載のロボットシステム。
【請求項3】
前記撮影装置は、前記第1操作装置に着脱可能に構成されている、請求項2に記載のロボットシステム。
【請求項4】
前記撮影装置は、第1携帯通信端末で構成されている、請求項3に記載のロボットシステム。
【請求項5】
前記ロボットシステムは、前記第2教示装置に着脱可能に構成されている、第2携帯通信端末をさらに備える、請求項1~4のいずれか1項に記載のロボットシステム。
【請求項6】
前記第1操作装置は、前記制御装置と有線で接続されていて、
前記第2操作装置は、前記第2携帯通信端末、通信ネットワーク、前記第1携帯通信端末、及び前記第1操作装置を経て、前記操作情報を前記制御装置に入力するように構成されている、請求項5に記載のロボットシステム。
【請求項7】
前記第1操作装置は、前記第1携帯通信端末及び通信ネットワークを介して、前記操作情報を前記制御装置に入力するように構成されていて、
前記第2操作装置は、前記第2携帯端末及び前記通信ネットワークを介して前記操作情報を前記制御装置に入力するように構成されている、請求項5に記載のロボットシステム。
【請求項8】
前記制御装置は、前記第1許可器が、前記操作情報の実行を許可している場合に、前記第2操作装置から前記操作情報が入力されたとしても、前記第1操作装置から前記操作情報が入力された場合には、当該第1操作装置から入力された前記操作情報を基に前記ロボットを動作させるように構成されている、請求項1~7のいずれか1項に記載のロボットシステム。
【請求項9】
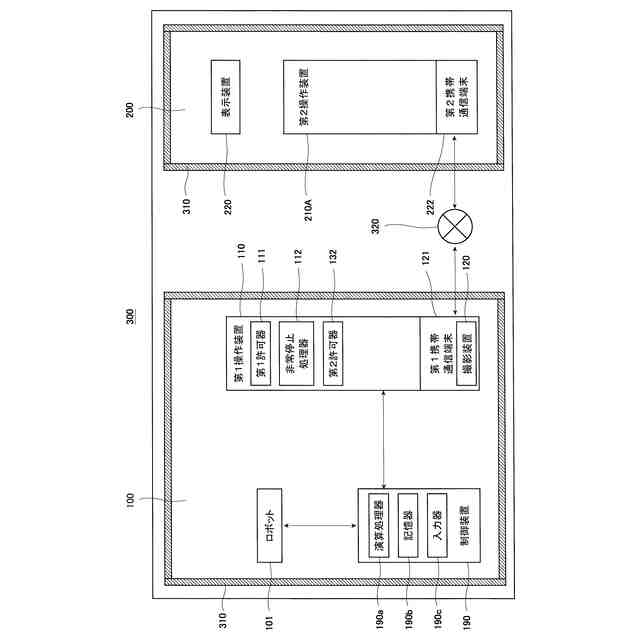
前記第1操作装置には、前記ロボットの自動運転を許可するように構成されている、第2許可器が設けられていて、
前記第2操作装置には、前記第2許可器が設けられていない、請求項1~8のいずれか1項に記載のロボットシステム。
【請求項10】
前記第1操作装置及び前記第2操作装置には、それぞれ、前記ロボットの自動運転を許可するように構成されている、第2許可器が設けられていて、
前記制御装置は、前記第2操作装置に設けられている前記第2許可器から前記ロボットの自動運転を許可する信号が入力されても、前記ロボットの自動運転を実行しないように構成されている、請求項1~8のいずれか1項に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム及びその制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
産業用ロボットの動作開始時において遠隔からの安全確認が可能であり、かつ安全性を向上させることを目的とした、産業用ロボット制御システムが知られている(例えば、特許文献1参照)。
【0003】
特許文献1に開示されている産業用ロボット制御システムでは、制御装置が、第1操作部及び第2操作部の一方がオン状態である間に他方がオン状態となった場合に、産業用ロボットを停止状態から動作可能状態に遷移させる。
【0004】
これにより、複数の操作者のいずれもが操作部をオン状態とした場合に、産業用ロボットを停止状態から動作可能状態に切り替えられる。このため、複数の操作者の総意に基づいた安全管理が可能となるとしている。
【先行技術文献】
【特許文献】
【0005】
特開2018-176330号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に開示されている産業用ロボット制御システムでは、複数の操作者の内、いずれの操作者が、産業用ロボットの操作を実行するのか記載されていない。このため、産業用ロボットを直接視認することができる操作者の操作により、産業用ロボットが動作するのか、ロボットを直接視認することができない遠隔の場所にいる操作者の操作により、産業用ロボットが動作するのか、不明であり、未だ改善の余地があった。
【0007】
本開示は、上記特許文献1に開示されている産業用ロボット制御システムに比して、ロボットの操作の主体を明確にして、ロボットが動作するときの安全性についても充分に担保することができる、ロボットシステム及びその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記従来の課題を解決するために、本開示に係るロボットシステムは、第1空間内に配置されているロボットと、前記第1空間内に配置され、操作情報が出力されるように構成されている第1操作装置と、前記第1空間から隔離された空間である、第2空間内に配置され、前記操作情報が出力されるように構成されている第2操作装置と、制御装置と、を備え、前記第1操作装置は、前記第2操作装置から前記制御装置への前記操作情報の実行許可をオン/オフするように構成されている、第1許可器を備え、前記制御装置は、第1操作者の操作により、前記第1許可器が、前記操作情報の実行を許可している場合には、第2操作者の操作により、前記第2操作装置から入力された前記操作情報を基に前記ロボットを動作させ、前記第1操作者の操作により、前記第1許可器が、前記操作情報の実行を許可していない場合には、前記第2操作者の操作により、前記第2操作装置から前記操作情報が入力されても、当該操作情報を基に前記ロボットを動作させないように構成されている。
【0009】
これにより、ロボットの近隣であって、ロボットを直接視認することができる第1操作者が、第1許可器を操作することにより、ロボットの動作可能状態になるときの安全性を担保することができる。
【0010】
また、制御装置は、第1許可器が、操作情報の実行を許可している場合に、ロボットを直接視認することができない遠隔の場所にいる第2操作者が、操作装置を操作することで、入力された操作情報を基にロボットを動作させる。このため、ロボットの操作の主体が明確になり、ロボットが動作するときの安全性についても充分に担保することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
作業設備
7日前
川崎重工業株式会社
搬送システム
7日前
川崎重工業株式会社
二酸化炭素分離システム
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
パレット及びロボットシステム
7日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
6日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
13日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
9日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
9日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
今日
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
21日前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
28日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
29日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
積水ハウス株式会社
フィルム除去具
1日前
株式会社マキタ
電気機器
29日前
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社不二越
協働ロボットシステム
6日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ