TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068931
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023179063
出願日
2023-10-17
発明の名称
動翼の制振構造
出願人
川崎重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
F04D
29/34 20060101AFI20250422BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】ガスタービンエンジンのような回転機械において、部品点数および組立工数を低減し、かつ大きなスペースを必要とせず、作業性にも優れた動翼の制振構造を提供する。
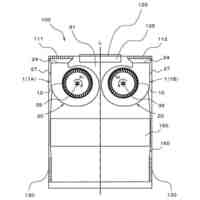
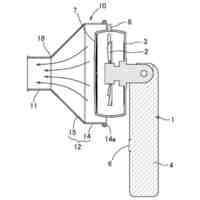
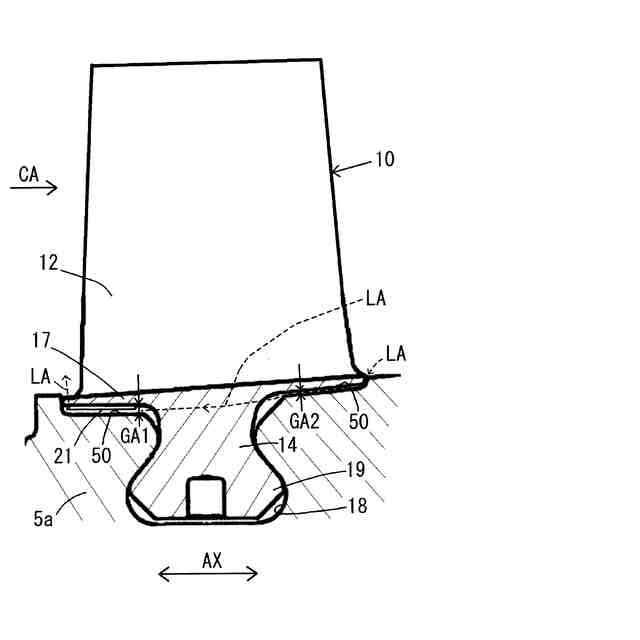
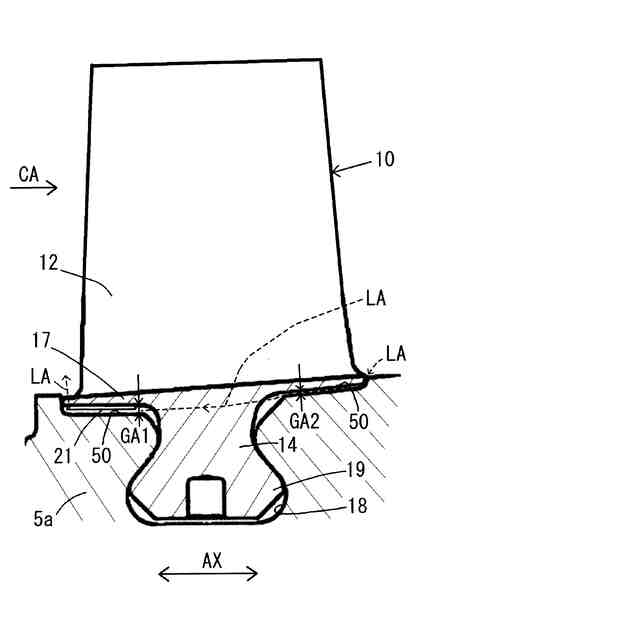
【解決手段】ディスク(5a)の外周に複数の動翼(10)を植設し、前記ディスク(5a)の外周面(50)上に位置する台座(17)と、前記動翼(10)における前記ディスク(5a)に取り付けられる取付部(14)が、前記ディスク(5a)の内部に設けられた係合溝(18)に係合する係合突起(19)とを有し、前記外周面(50)と前記台座(17)との間に前記複数の動翼(10)に跨るダンパ(21)を設ける。
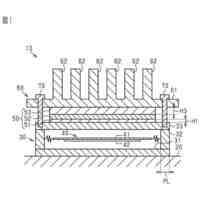
【選択図】図2
特許請求の範囲
【請求項1】
ディスクの外周に植設された複数の動翼の制振構造であって、
前記動翼における前記ディスクに取り付けられる取付部が、前記ディスクの外周面上に位置する台座と、前記ディスクの内部に設けられた係合溝に係合する係合突起とを有し、
前記外周面と前記台座との間に前記複数の動翼に跨るダンパが介装されている動翼の制振構造。
続きを表示(約 250 文字)
【請求項2】
請求項1において、前記ダンパはすべての前記動翼に跨る円環状である動翼の制振構造。
【請求項3】
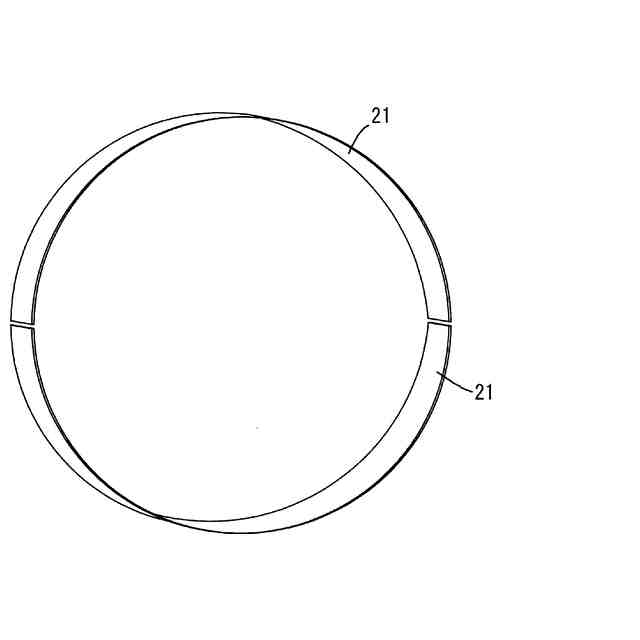
請求項1において、前記ダンパは前記ディスクの周方向に分割された複数の板材からなる動翼の制振構造。
【請求項4】
請求項1または2において、前記ダンパは前記動翼におけるディスク軸方向の低圧側に配置されている動翼の制振構造。
【請求項5】
請求項1または2において、前記動翼はガスタービンエンジンにおける圧縮機の動翼の制振構造。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ガスタービンエンジンのような回転機械における動翼の振動を抑制する制振構造に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えばガスタービンエンジンの圧縮機においては、ディスクの外周に複数の動翼が植設されているので、運転状況によっては動翼の共振が発生する懸念があった。その対策として、通常、動翼1枚ごとにダンパと呼ばれる制振部品を組み込んでいるが、これでは部品点数および組立工数が増加する。そこで、下記の特許文献1では、複数の動翼にワイヤをかけ渡して挿通することで、動翼の振動を抑制している。
【先行技術文献】
【特許文献】
【0003】
特開平10-325302号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、動翼にワイヤを通すことから、作業性に劣るうえに、ワイヤを通す大きなスペースが必要になるので、小形のガスタービンエンジンには採用しにくい。
【0005】
本開示の目的は、部品点数および組立工数を低減し、かつ大きなスペースを必要とせず、作業性にも優れた動翼の制振構造を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示に係る動翼の制振構造は、
ディスクの外周に植設された複数の動翼の制振構造であって、
前記動翼における前記ディスクに取り付けられる取付部が、前記ディスクの外周面上に位置する台座と、前記ディスクの内部に設けられた係合溝に係合する係合突起とを有し、
前記外周面と前記台座との間に前記複数の動翼に跨るダンパが介装されている。
【0007】
この構成によれば、ディスクの外周面と台座との間にダンパが介装されているので、動翼の共振の発生を抑えることができる。また、ダンパは複数の動翼に跨っているので、ダンパの数量が抑制される結果、部品点数および組立工数が減少する。さらに、ダンパはディスクの外周面と台座との間に介装するだけであるから、作業性がよい。
【発明の効果】
【0008】
本開示に係る動翼の制振構造によれば、ディスクの外周面と動翼の台座との間に、複数の動翼に跨るダンパが介装されているので、部品点数および組立工数を低減し、かつ大きなスペースを必要とせず、作業性にも優れた動翼の制振構造を提供することができる。
【図面の簡単な説明】
【0009】
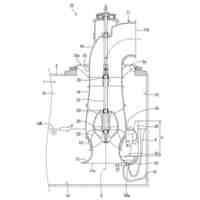
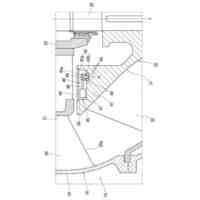
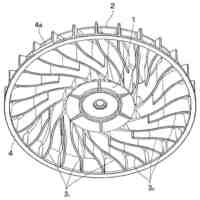
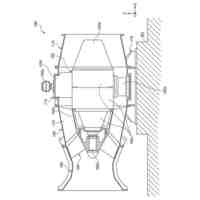
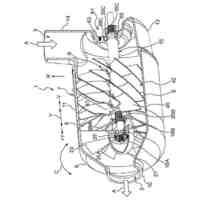
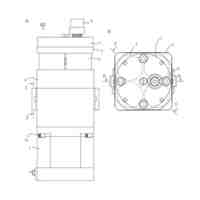
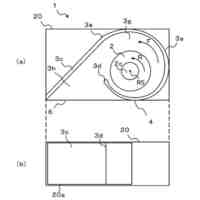
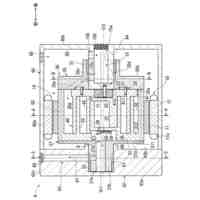
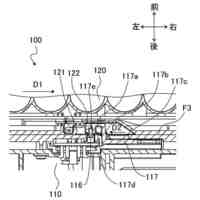
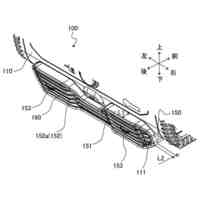
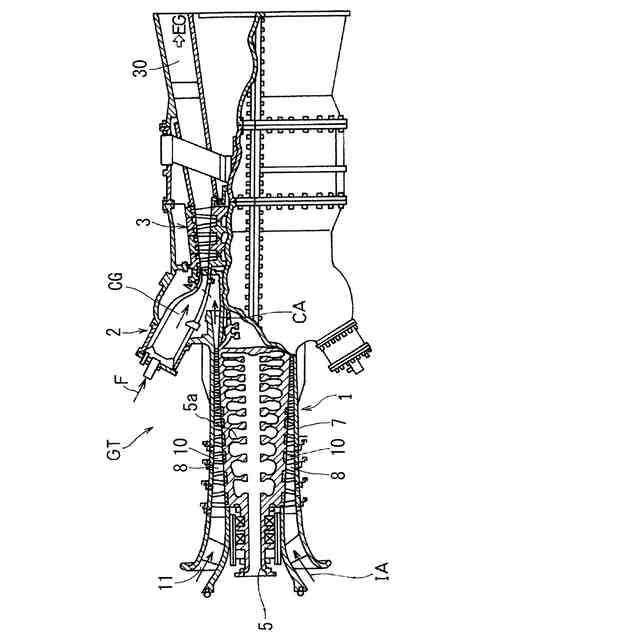
本開示に係る動翼の制振構造を備えたガスタービンエンジンを示す部分破断側面図である。
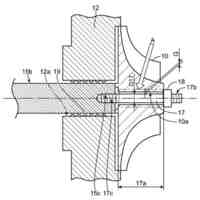
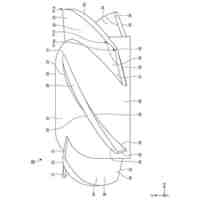
本開示の一実施形態に係る動翼の部分拡大断面図である。
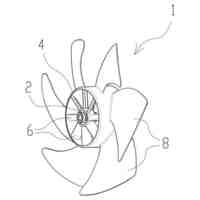
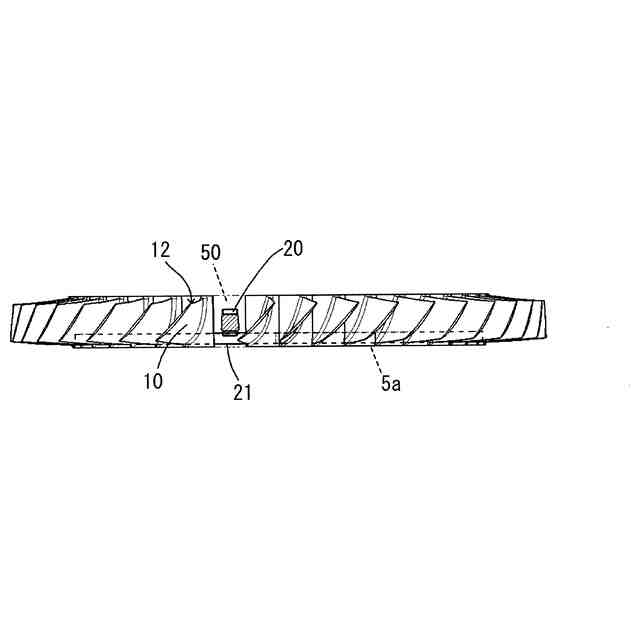
本開示に係る動翼の制振構造の要部を示す平面図である。
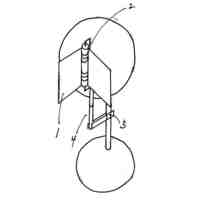
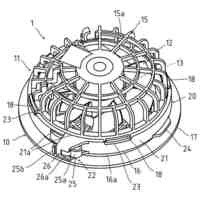
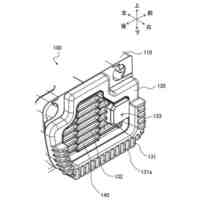
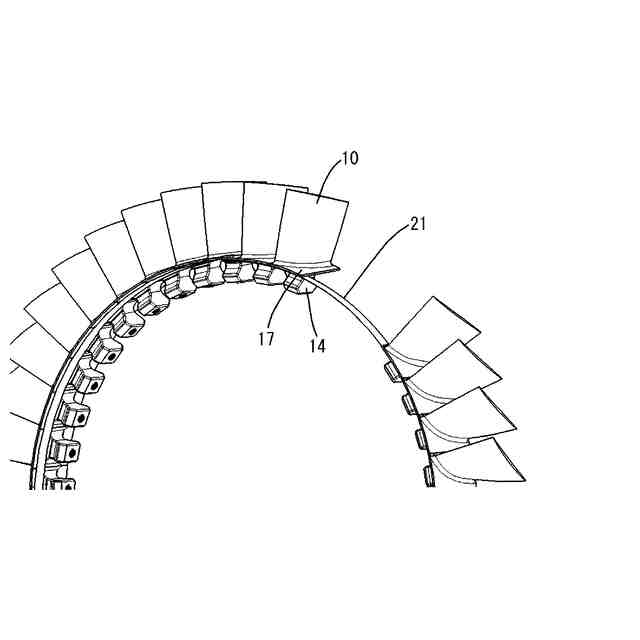
本開示に係る動翼の制振構造の要部を示す斜視図である。
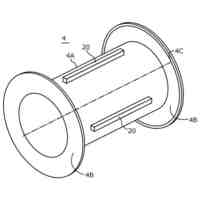
(a)は本開示に係るダンパの動翼への組み込み方法を示す斜視図であり、(b)は(a)の矩形の破線で囲まれた要部を示す拡大斜視図である。
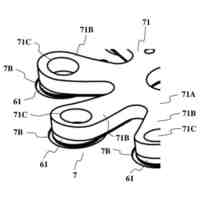
本開示に係るダンパの変形例を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示に係る実施形態を図面に従って説明するが、本開示はこの実施形態に限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
圧縮機
1か月前
ダイニチ工業株式会社
空調装置
4日前
個人
扇風機取り付け風力分散機
2か月前
株式会社酉島製作所
ポンプ
23日前
シャープ株式会社
送風装置
1か月前
シャープ株式会社
送風装置
1か月前
株式会社酉島製作所
ポンプ
1か月前
シャープ株式会社
送風装置
1か月前
個人
携帯型扇風機用の送風ノズル
10日前
株式会社電業社機械製作所
ポンプ
2か月前
株式会社ニクニ
液封式ポンプ装置
7日前
株式会社不二越
油圧ユニット
14日前
リンナイ株式会社
羽根車
2か月前
株式会社ANBEC
横軸円筒型ポンプ
3か月前
株式会社村田製作所
圧電ポンプ
1か月前
個人
連結式螺旋翼体及び流体移送装置
11日前
株式会社コスメック
ピストン型ポンプ
8日前
株式会社ON-LIFE
衣服用送風装置
2か月前
株式会社豊田自動織機
遠心圧縮機
2か月前
株式会社豊田自動織機
遠心圧縮機
2日前
株式会社神戸製鋼所
ターボ圧縮機
15日前
株式会社豊田自動織機
遠心圧縮機
8日前
株式会社豊田自動織機
遠心圧縮機
2か月前
兵神機械工業株式会社
パドルポンプ
1か月前
シャープ株式会社
送風装置及び団扇
1か月前
三菱電機株式会社
遠心送風機
24日前
ミネベアミツミ株式会社
軸流ファン
2か月前
Next Innovation合同会社
羽根車
11日前
株式会社豊田自動織機
圧縮機
2か月前
パシフィックゴルフマネージメント株式会社
送風機
2か月前
サンデン株式会社
圧縮機
2か月前
サンデン株式会社
圧縮機
2か月前
パシフィックゴルフマネージメント株式会社
送風機
2か月前
パシフィックゴルフマネージメント株式会社
送風機
2か月前
サンデン株式会社
圧縮機
2か月前
学校法人 中央大学
ポンプユニット及びポンプ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ