TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075739
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187118
出願日
2023-10-31
発明の名称
搬送システム、搬送物の搬送方法、および、ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20250508BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】搬送物の搬送と搬送物に対する搬送以外の作業とを容易に行うことが可能な搬送システム、搬送物の搬送方法、および、ロボットを提供する。
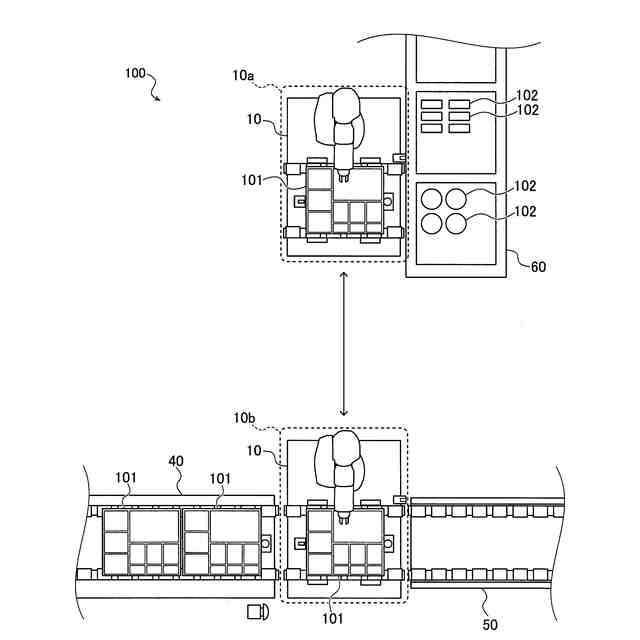
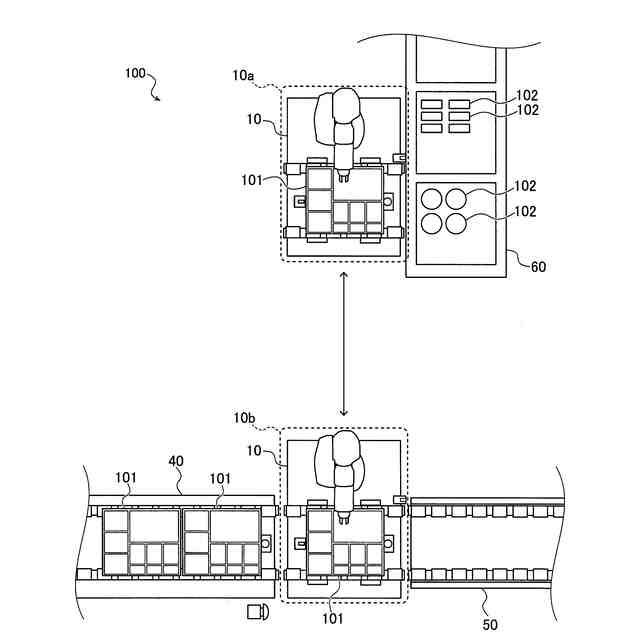
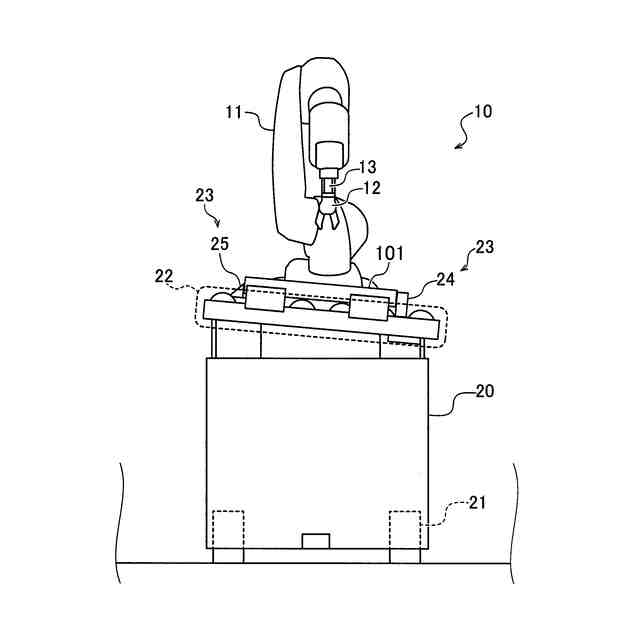
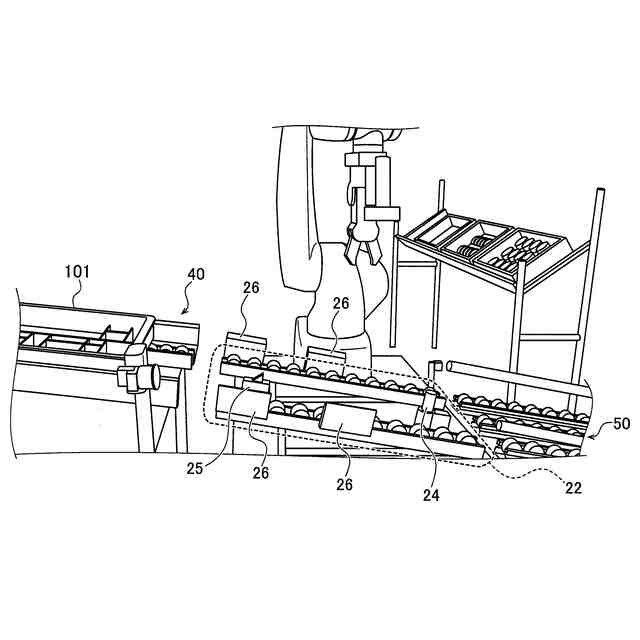
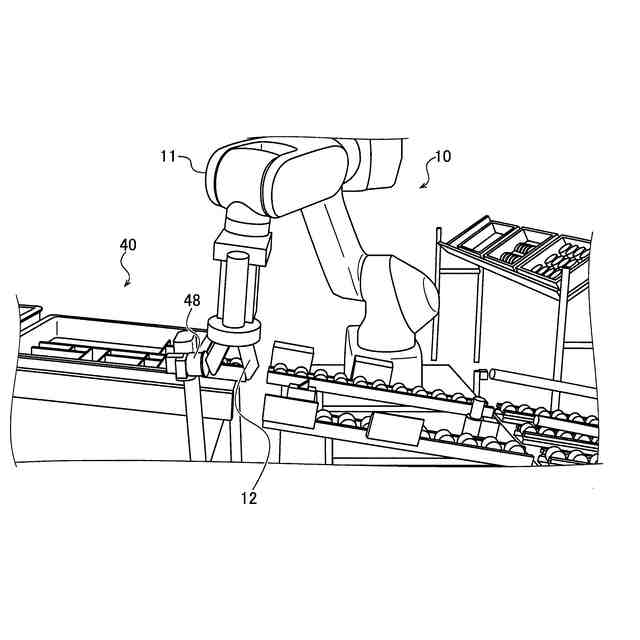
【解決手段】この搬送システム100は、ロボット10と供給部40とを備える。ロボット10は、配置容器101に対して作業を行うロボットアームと、配置容器101が載置される台車部と、台車部を移動させる移動部とを含む。供給部40は、ロボット10のロボットアームによる操作と、台車部の移動との少なくとも一方に基づいて、ロボット10に対して配置容器101を供給する。
【選択図】図1
特許請求の範囲
【請求項1】
搬送物に対して作業を行うロボットアームと、前記搬送物が載置される台車部と、前記台車部を移動させる移動部とを含むロボットと、
前記ロボットの前記ロボットアームによる操作と、前記台車部の移動との少なくとも一方に基づいて、前記ロボットに対して前記搬送物を供給する供給部と、を備える、搬送システム。
続きを表示(約 1,200 文字)
【請求項2】
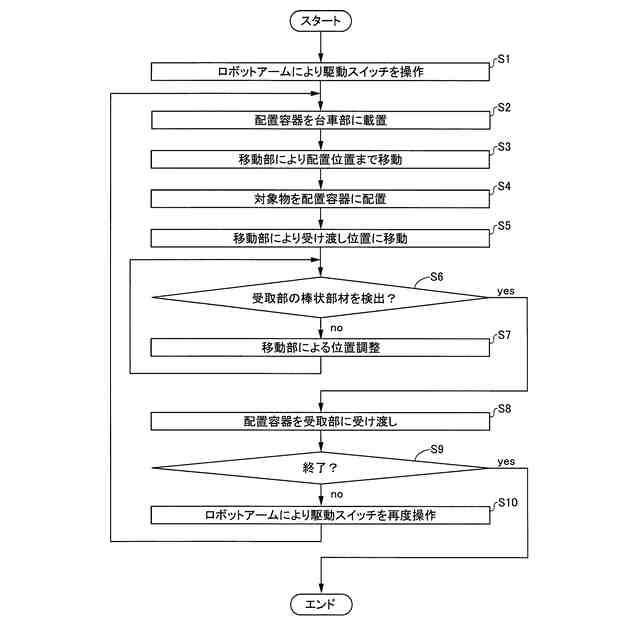
前記供給部は、前記ロボットアームの操作によって駆動する駆動部を含み、前記駆動部の駆動により前記ロボットの前記台車部に対して前記搬送物を載置する動作を行う、請求項1に記載の搬送システム。
【請求項3】
前記台車部は、対象物が配置される配置容器を含む前記搬送物が載置され、
前記ロボットアームは、前記対象物を把持する把持部を有し、
前記ロボットは、前記供給部より供給された前記配置容器を前記台車部に載置した状態で、前記対象物を前記配置容器に配置するための配置位置まで前記移動部により移動する、請求項1または2に記載の搬送システム。
【請求項4】
前記ロボットから前記配置容器を受け取る受取部をさらに備え、
前記ロボットは、前記配置位置において前記ロボットアームにより前記対象物を前記配置容器に配置した後に、前記配置容器を前記受取部に受け渡すための受け渡し位置まで前記移動部により移動する、請求項3に記載の搬送システム。
【請求項5】
前記ロボットは、前記受け渡し位置に移動した状態で、前記台車部に載置された前記配置容器を前記受取部に対して受け渡すとともに、前記供給部から新たな前記配置容器を受け取る、請求項4に記載の搬送システム。
【請求項6】
前記ロボットは、前記供給部と前記受取部との間に配置されている前記受け渡し位置に移動した状態で、前記台車部の載置面から一方側の延長線上に配置されている前記受取部に対して前記配置容器を受け渡すとともに、前記台車部の前記載置面から他方側の延長線上に配置されている前記供給部から新たな前記配置容器を受け取る、請求項5に記載の搬送システム。
【請求項7】
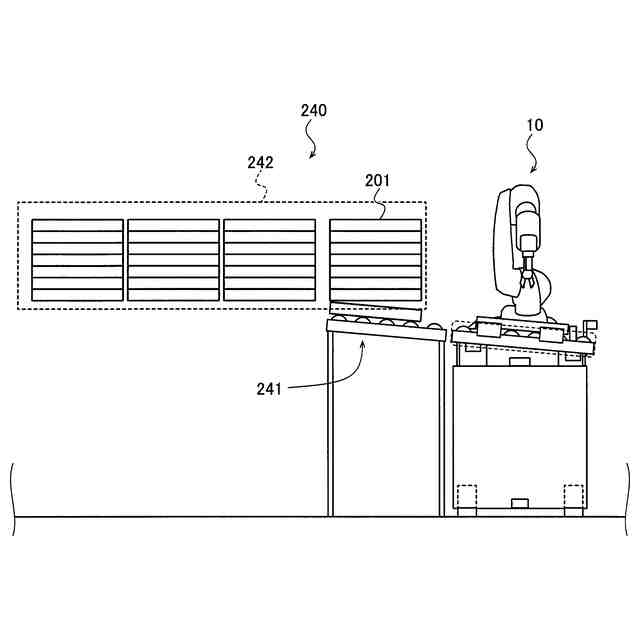
前記供給部は、前記搬送物が載置される供給斜面を有し、前記供給斜面からスライド移動させることによって前記ロボットに対して前記搬送物を供給する、請求項1または2に記載の搬送システム。
【請求項8】
前記供給部は、前記供給斜面に載置された前記搬送物を保持する供給保持部を含む、請求項7に記載の搬送システム。
【請求項9】
前記供給部は、前記ロボットアームの操作によって駆動することにより前記供給保持部を動作させる駆動部と、前記駆動部の動作を切り替える駆動スイッチとを含み、
前記ロボットは、前記ロボットアームを動作させることによって、前記駆動スイッチを操作する、請求項8に記載の搬送システム。
【請求項10】
前記ロボットは、前記台車部において前記搬送物が載置される載置面として載置斜面を有し、
前記載置斜面は、前記ロボットが前記供給部から前記搬送物を供給される位置に移動した状態で、前記供給部の前記供給斜面の延長線上に配置されている、請求項7に記載の搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、搬送システム、搬送物の搬送方法、および、ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、モービルロボットを含むワーク搬送システムが開示されている。特許文献1に開示されているワーク搬送システムでは、モービルロボットは、装置間においてワークを搬送する。モービルロボットには、ロボットハンドが備えられている。ロボットハンドは、ワークを把持するとともに、装置に設けられた移載台とモービルロボットとの間でワークを移動させる。
【先行技術文献】
【特許文献】
【0003】
特開平5-55346号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1のように、ロボット自身が、ワークを把持するロボットハンドを有するロボットアームにより搬送物を移動させる場合には、搬送物の形状または重量などに合わせてロボットアームを構成する必要がある。その場合には、搬送物の搬送に適合するように構成されたロボットアームでは、搬送物の把持以外の作業を行うことが困難となることが考えられる。そのため、搬送物の搬送と搬送物に対する搬送以外の作業とを容易に行うことが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、搬送物の搬送と搬送物に対する搬送以外の作業とを容易に行うことが可能な搬送システム、搬送物の搬送方法、および、ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による搬送システムは、搬送物に対して作業を行うロボットアームと、搬送物が載置される台車部と、台車部を移動させる移動部とを含むロボットと、ロボットのロボットアームによる操作と、台車部の移動との少なくとも一方に基づいて、ロボットに対して搬送物を供給する供給部と、を備える。
【0007】
この開示の第1の局面による搬送システムは、上記のように、ロボットのロボットアームによる操作と、台車部の移動との少なくとも一方に基づいて、ロボットに対して搬送物を供給する供給部を備える。これにより、供給部によりロボットに対して搬送物が供給されるため、ロボットアームを搬送物の移動に適合した構成とせずに、搬送物に対する作業に適合した構成とすることができる。その結果、搬送物の搬送と搬送物に対する搬送以外の作業とを容易に行うことができる。
【0008】
この開示の第2の局面による搬送物の搬送方法は、搬送物に対して作業を行うロボットアームと、搬送物が載置される台車部と、台車部を移動させる移動部と、を含むロボットによって、ロボットに対して搬送物を供給する供給部に対して、ロボットアームによる操作と台車部の移動との少なくとも一方を行い、ロボットのロボットアームによる操作と、台車部の移動との少なくとも一方に基づいて、供給部によりロボットに対して搬送物を供給する。
【0009】
この開示の第2の局面による搬送物の搬送方法は、上記のように、ロボットのロボットアームによる操作と、台車部の移動との少なくとも一方に基づいて、供給部によりロボットに対して搬送物を供給する。これにより、供給部によりロボットに対して搬送物が供給されるため、ロボットアームを搬送物の移動に適合した構成とせずに、搬送物に対する作業に適合した構成とすることができる。その結果、搬送物の搬送と搬送物に対する搬送以外の作業とを容易に行うことが可能な搬送物の搬送方法を提供できる。
【0010】
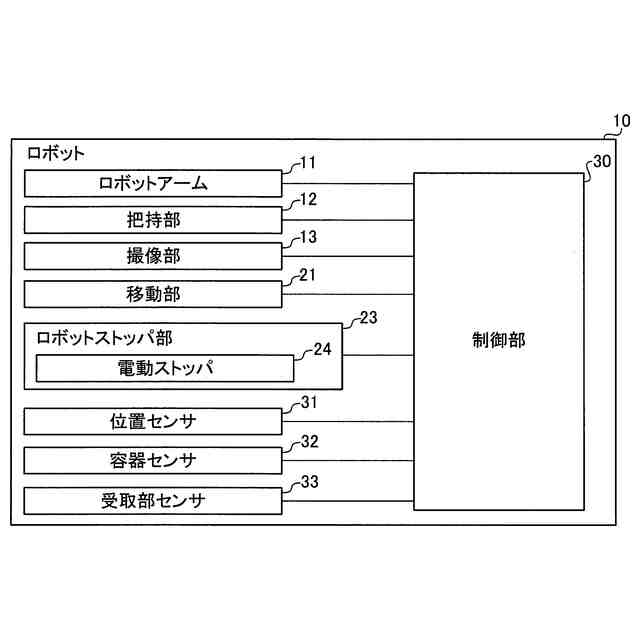
この開示の第3の局面によるロボットは、搬送物に対して作業を行うロボットアームと、搬送物が載置される台車部と、台車部を移動させる移動部と、搬送物を供給する供給部に対して、ロボットアームによる操作と、台車部の移動との少なくとも一方を行う制御部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
日東精工株式会社
電動ドライバ
12日前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
17日前
株式会社ダイヘン
移動体
15日前
東京都公立大学法人
対象物把持装置
26日前
株式会社スター精機
吸着パッド
11日前
工機ホールディングス株式会社
作業機
3日前
学校法人五島育英会
アーム機構
17日前
工機ホールディングス株式会社
作業機
3日前
工機ホールディングス株式会社
作業機
3日前
株式会社スター精機
吸着パッド
11日前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社PILLAR
チューブ保持治具
22日前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
オークラ輸送機株式会社
ハンド装置
25日前
株式会社スター精機
産業用ロボット
9日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社マキタ
電動作業機
18日前
株式会社マキタ
電動作業機
18日前
株式会社リコー
多関節ロボット
16日前
芝浦機械株式会社
双腕ロボット
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社ジャノメ
ロボット
5日前
株式会社安川電機
ロボット
9日前
株式会社ダイヘン
ロボット制御システム
15日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
9日前
株式会社安川電機
ロボット
9日前
セイコーエプソン株式会社
ロボット
11日前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ