TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042117
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023148947
出願日
2023-09-14
発明の名称
ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡単な構造にてセンサへのノイズの影響を低減することができるロボットを提供する。
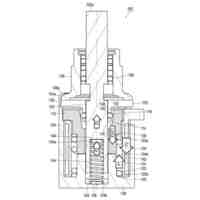
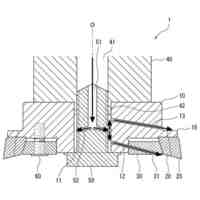
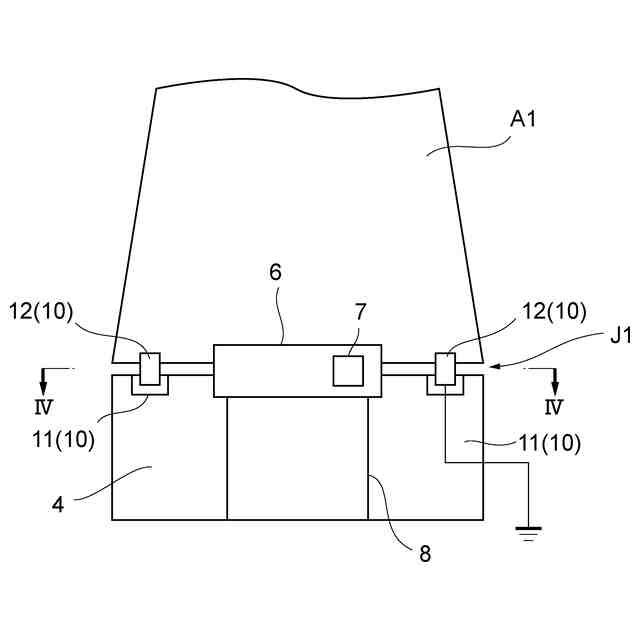
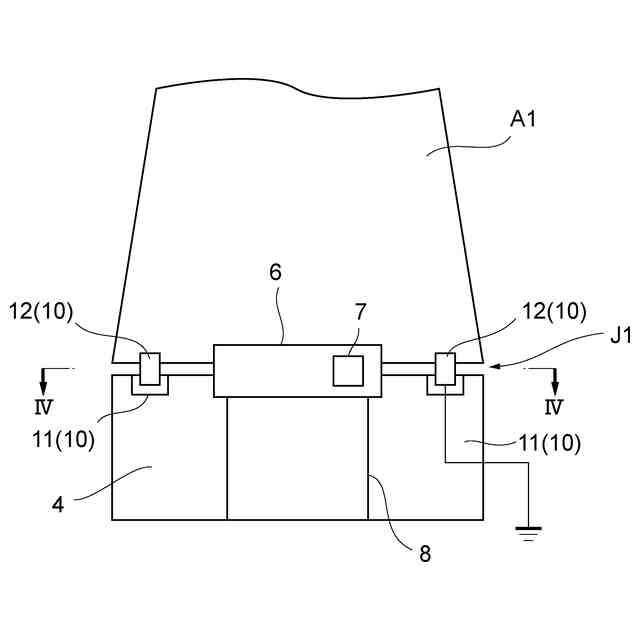
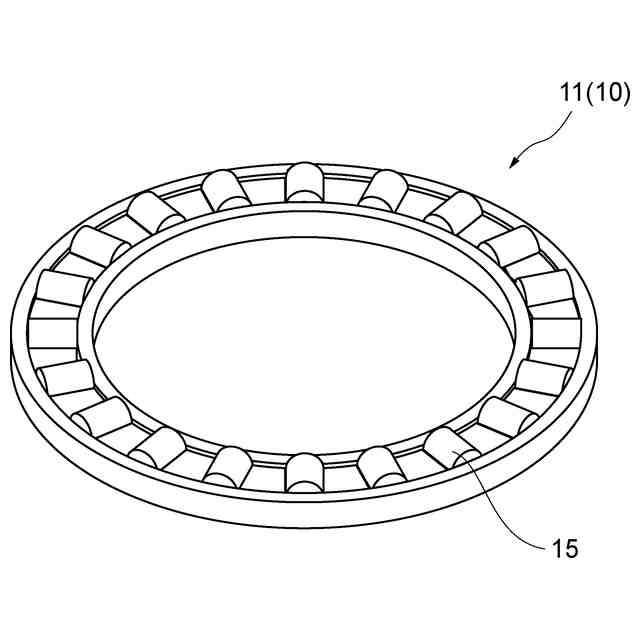
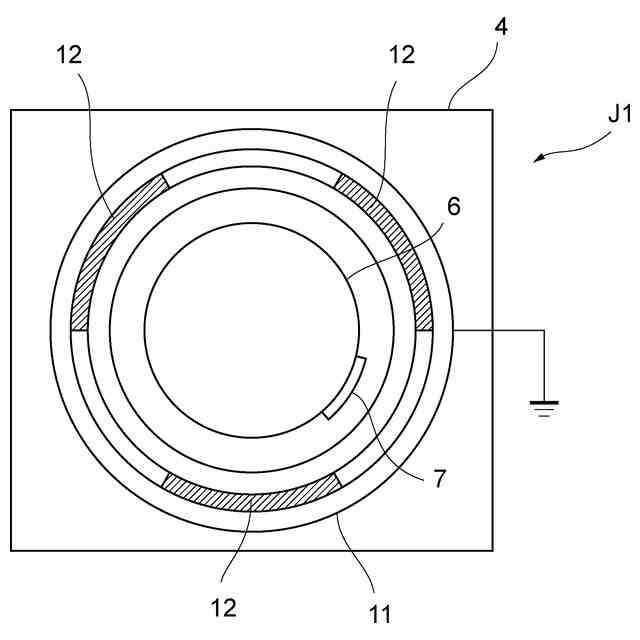
【解決手段】基台4と、基台4に対して第1回動軸6を介して回動する第1アームA1と、第1回動軸6に設けられたセンサ7と、基台4における第1回動軸6及びセンサ7と離隔した位置に設けられたベアリング11と、第1アームA1におけるベアリング11と対向する位置に設けられ、ベアリング11と接触することにより基台4と第1アームA1とを接地する突起12とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
第1部材と、
前記第1部材に対して軸を介して回動する第2部材と、
前記軸に設けられたセンサと、
前記第1部材における前記軸及び前記センサと離隔した位置に設けられた第1導電性部と、
前記第2部材における前記第1導電性部に対向する位置に設けられ、前記第1導電性部と接触することにより前記第1部材と前記第2部材とを接地する第2導電性部と、
を備えることを特徴とするロボット。
続きを表示(約 220 文字)
【請求項2】
前記第1部材は、基台であり、
前記第2部材は、アームであることを特徴とする請求項1に記載のロボット。
【請求項3】
前記第1導電性部と前記第2導電性部とのいずれか一方は、前記軸を回動軸とするスラストベアリングであり、
前記第1導電性部と前記第2導電性部とのいずれか他方は、前記スラストベアリングの少なくとも一部と接触する突起であることを特徴とする請求項1又は2に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
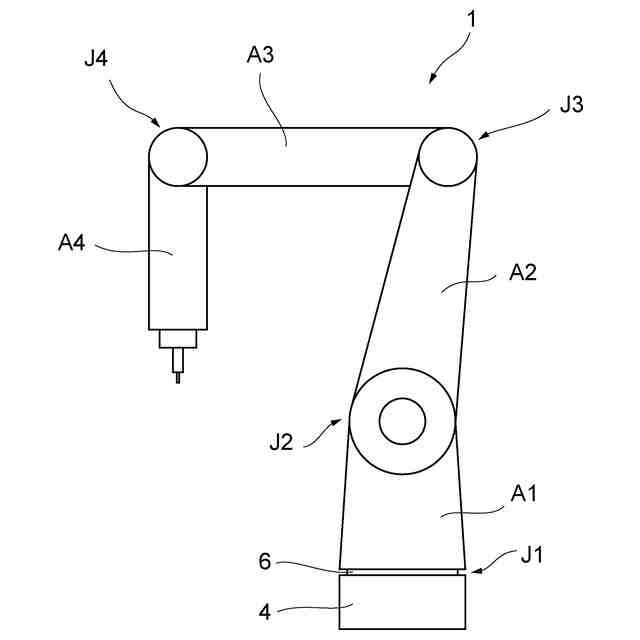
産業用のロボットとして多関節ロボットが用いられている。このようなロボットにおいては複数のセンサを搭載しているため耐ノイズ性能の向上が求められている。
【0003】
例えば特許文献1においては、全波整流回路や差動アンプ、フィルタ回路を用いて、トルクセンサのトルク信号からモータや電磁ブレーキ等で発生するノイズを除去することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平6-323930号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、例えば、ロボットの基台とアームとを接続する軸にトルクセンサが設けられる場合がある。ロボットの内部にセンサが設けられる場合、センサはモータ等のノイズを受け易い。一例を挙げるとロボットの先端側のモータ等で発生したノイズがアームへ逃がされ、アームへ逃がされたノイズが、軸やトルクセンサを介して基台側で大地へ接地される場合があり、このような場合はトルクセンサがノイズの影響を受け易い。このように、例えばロボットを構成する部材間では軸がノイズの経路となる場合があるため、軸に対して設けられるセンサに対してノイズの影響を低減することが求められる。
【0006】
ところが、特許文献1に開示されたノイズを低減する方法では、フィルタ回路等を使用するため構成が複雑化する可能性がある。
【0007】
上記課題に鑑み、本発明は、簡単な構造にてセンサへのノイズの影響を低減することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係るロボットは、第1部材と、前記第1部材に対して軸を介して回動する第2部材と、前記軸に設けられたセンサと、前記第1部材における前記軸及び前記センサと離隔した位置に設けられた第1導電性部と、前記第2部材における前記第1導電性部に対向する位置に設けられ、前記第1導電性部と接触することにより前記第1部材と前記第2部材とを接地する第2導電性部と、を備える。
【0009】
また、前記ロボットにおいて、前記第1部材は、基台であり、前記第2部材は、アームである。
【0010】
また、前記ロボットにおいて、前記第1導電性部と前記第2導電性部とのいずれか一方は、前記軸を回動軸とするスラストベアリングであり、前記第1導電性部と前記第2導電性部とのいずれか他方は、前記スラストベアリングの少なくとも一部と接触する突起である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ソレノイド
2日前
株式会社不二越
射出成形機
10日前
株式会社不二越
ソレノイド
12日前
株式会社不二越
油圧ユニット
9日前
株式会社不二越
レースガイド保持器
9日前
株式会社不二越
サーフェスブローチ盤
11日前
株式会社不二越
組立式スカイビングカッタ
3日前
株式会社不二越
スルーフィード式の加工装置
3日前
株式会社不二越
不等リードラジアスエンドミル
2日前
株式会社不二越
スラスト自動調心ころ軸受の保持器
9日前
株式会社不二越
軌道生成装置及び軌道生成プログラム
10日前
株式会社不二越
切断刃用合金鋼およびそれを用いた切断刃
11日前
株式会社不二越
超硬合金およびこれを用いた切削加工用工具
4日前
トヨタ紡織株式会社
燃料電池用セパレータ
13日前
株式会社不二越
産業用制御装置及び産業用制御装置の制御方法
18日前
株式会社不二越
ブレーキ解除回路、ブレーキ解除方法、及び制御システム
12日前
日東精工株式会社
電動ドライバ
6日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
9日前
トヨタ自動車株式会社
関節機構
11日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
2か月前
東京都公立大学法人
対象物把持装置
20日前
学校法人五島育英会
アーム機構
11日前
株式会社スター精機
吸着パッド
5日前
株式会社スター精機
吸着パッド
5日前
個人
バール
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社PILLAR
チューブ保持治具
16日前
川崎重工業株式会社
制動システム
1か月前
庄内機械株式会社
釘打装置
24日前
住友重機械工業株式会社
ロボット
1か月前
株式会社アイエイアイ
グリッパー
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ