TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037315
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144159
出願日
2023-09-06
発明の名称
基板搬送用ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20250311BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタを正確な位置に移動させることができる垂直多関節ロボットを用いた基板搬送用ロボットを提供する。
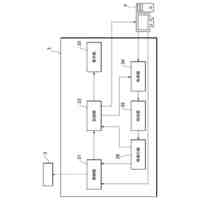
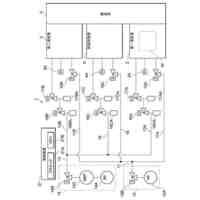
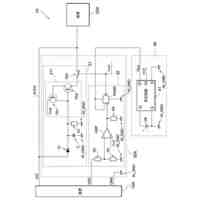
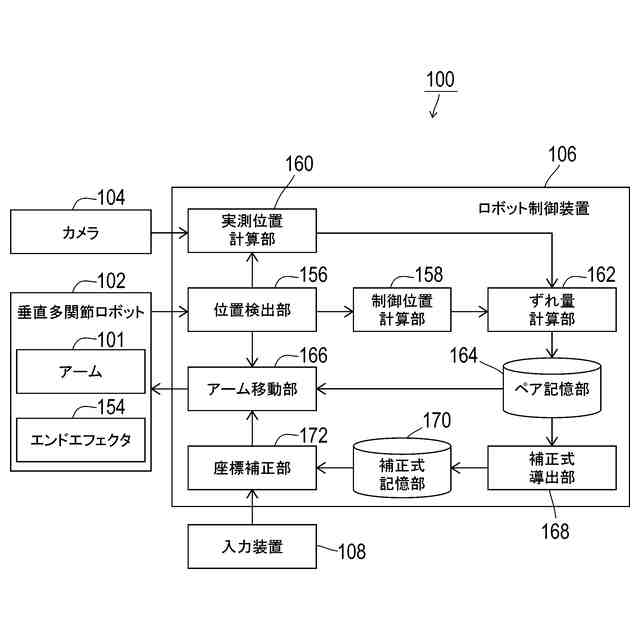
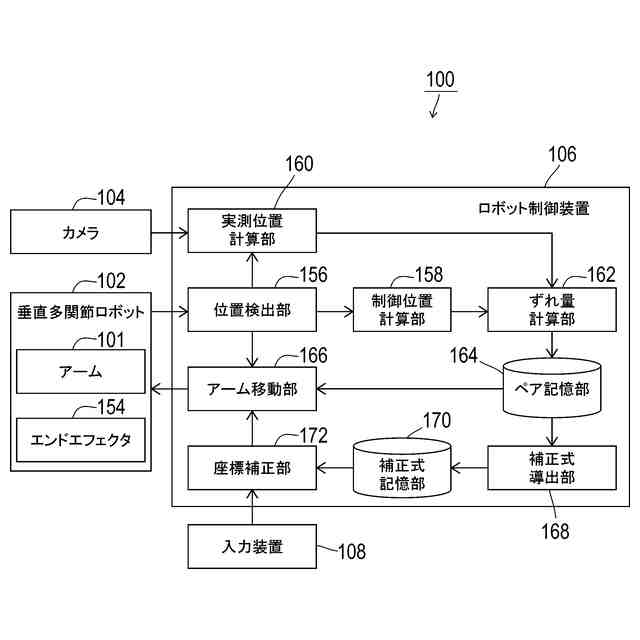
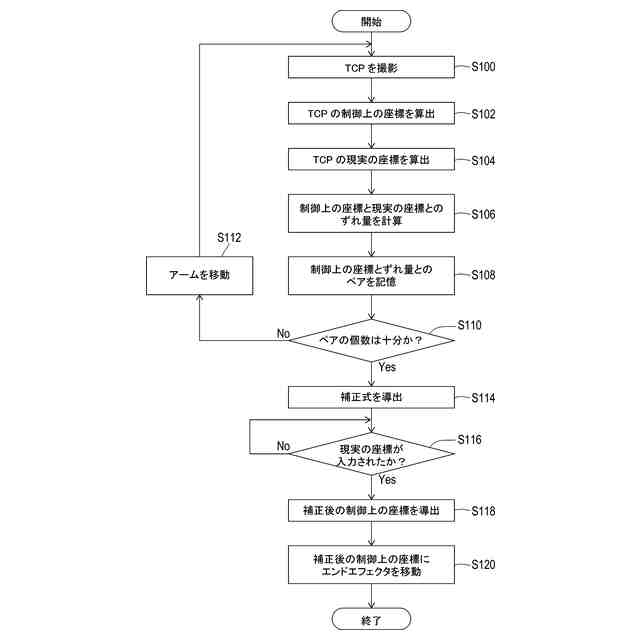
【解決手段】基板搬送用ロボット100は、垂直多関節ロボット102と、エンドエフェクタ154のTCPを撮影するカメラ104と、ロボット制御装置106とを備え、ロボット制御装置は、TCPの制御上の座標を算出する制御位置計算部158と、カメラで撮影したTCPの現実の座標を算出する実測位置計算部160と、制御上の座標と現実の座標とのずれ量を計算するずれ量計算部162と、制御上の座標とずれ量とのペアを複数記憶するペア記憶部164と、複数のペアから現実の座標を制御上の座標に変換する補正式を導出する補正式導出部168と、入力された現実の座標に対し、補正式を用いて補正後の制御上の座標を導出する座標補正部172とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
複数のアームを有する垂直多関節ロボットと、
前記アームに装着されたエンドエフェクタの基準位置であるTCPを撮影するカメラと、
前記垂直多関節ロボットの動作を制御するロボット制御装置とを備え、
前記ロボット制御装置は、
前記TCPの制御上の座標を算出する制御位置計算部と、
前記カメラで撮影した前記TCPの現実の座標を算出する実測位置計算部と、
前記制御上の座標と前記現実の座標の差分であるずれ量を計算するずれ量計算部と、
前記制御上の座標と前記ずれ量とのペアを複数記憶するペア記憶部と、
複数の前記ペアから前記現実の座標を前記制御上の座標に変換する補正式を導出する補正式導出部と、
入力された前記現実の座標に対し、前記導出された前記補正式を用いて補正後の前記制御上の座標を導出する座標補正部とを有することを特徴とする基板搬送用ロボット。
続きを表示(約 380 文字)
【請求項2】
前記ずれ量計算部は、
前記垂直多関節ロボットの動作を制御して所定位置に移動させたときに、前記垂直多関節ロボットをそれ以上動作させずに、前記カメラを用いて前記ずれ量を求めることを特徴とする請求項1に記載の基板搬送用ロボット。
【請求項3】
前記ずれ量計算部は、
前記垂直多関節ロボットの動作を制御して所定位置に移動させようとした後に、
前記カメラを用いて前記TCPを認識し、該TCPの現実の位置が制御上の所定位置からずれていた場合に、前記TCPが所定位置に至るように前記垂直多関節ロボットを移動させてずれを解消し、
ずれを解消するために移動した前記垂直多関節ロボットの移動前後のエンコーダ値を取得することによって前記ずれ量を求めることを特徴とする請求項1に記載の基板搬送用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のアームを有する垂直多関節ロボットを備えた基板搬送用ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
基板を搬送するロボットとしては、スカラロボット(水平多関節ロボット)が採用される場合が多い。スカラロボットは使い方が限定されている場合が多いため、一般的には各用途に合った専用機を設計することが多く、高精度な動作が実現されている。
【0003】
しかし専用機を設計するということは、用途が限られるため垂直多関節ロボットの標準機(汎用機)と比較すると製造コストが高くなる。また、汎用のスカラロボットを使用しようとした場合、動作範囲エリアを拡大するために、直動の走行装置も必要になる場合が多く、設備のコストが高くなる。よって、コスト面と広い動作範囲を考慮し、汎用的な垂直多関節ロボットを用いて基板搬送を行うことも考えられる。
【0004】
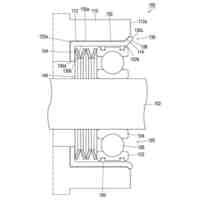
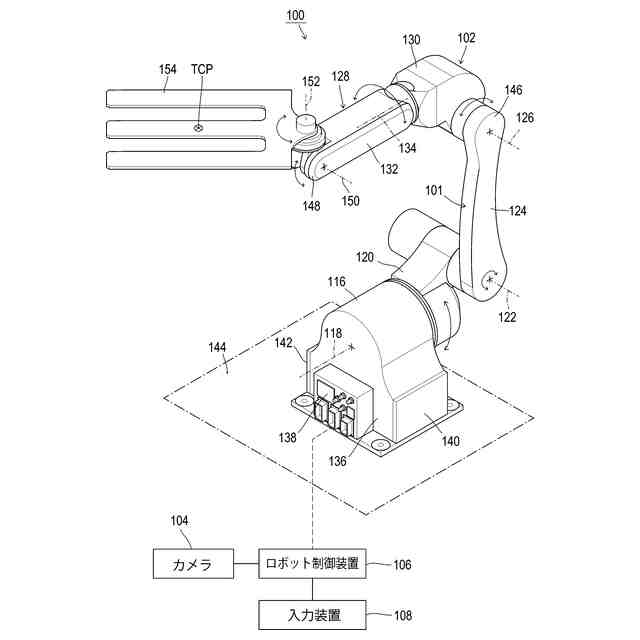
垂直多関節ロボットは、一般的に、アーム全体を水平方向に回動させる軸が配置され、アームの各関節の軸が回動する方向が垂直方向となっている。アームは、その各関節に設けられたアクチュエータである電動モータを有する。電動モータは、駆動信号によって駆動され、アームの目標とする動作を実現する。またアームの先端には、例えば基板(ワーク)を載置するハンドなどのエンドエフェクタが装着されている。
【0005】
ところが垂直多関節ロボットは、非常に複雑な機構であるため、アームのたわみやバックラッシなどの誤差要因が存在することにより、エンドエフェクタの基準位置であるツールセンターポイント(TCP)の現実の座標と制御上の座標との間に誤差(ずれ量)が生じる場合がある。したがって基板搬送という用途においては、スカラロボットよりも垂直多関節ロボットの方が動作上の誤差が大きい。基板搬送ではハンド部分の軌跡の許容誤差が1mm未満のような高い精度が要求される場合があり、垂直多関節ロボットは採用しにくかった。
【0006】
特許文献1には、垂直多関節ロボットの位置合わせ装置が記載されている。この位置合わせ装置は、画像処理装置とロボット制御盤とを備える。画像処理装置は、カメラからロボット手先にある基準部材の画像を入力して、各ポイントで基準部材の位置データを算出する。また画像処理装置は、画像の重心位置を求めて、位置合わせ位置から見た基準部材の中心位置データとし、これを基準部材の中心があるべき既知の位置データ例えば画面の中心と比較してずれ量を求める。
【0007】
さらに画像処理装置は、求めたずれ量から、ロボット手先の位置と姿勢に対する補正量を求めてロボット制御盤に与える。ロボット制御盤では、画像処理装置からの補正量からロボット手先の位置と姿勢の基準データに対するシフト量を求め、このシフト量を基準データに加算または減算して位置合わせの再現を行う。
【0008】
特許文献2には、垂直多関節ロボットのツールセンターポジションのずれを検出する装置(TCPずれ検出装置)が記載されている。このTCPずれ検出装置は、ロボット製造工場でキャリブレーションされたロボットが、例えば客先に出荷されて組み立てられた後に、ロボットにツール(ハンド)を装着した際のツールのTCPのずれを、ステレオカメラから構成された撮像装置を用いて検出する。
【先行技術文献】
【特許文献】
【0009】
実開平4-114607号公報
特開2020-059064号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上述したように、特許文献1、2には、カメラを用いて垂直多関節ロボットの位置補正をすること、いわゆるキャリブレーションが記載されている。しかしながら基板搬送の用途には高い精度が必要とされるため、さらなる位置補正の高精度化を図る必要があった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
20日前
株式会社不二越
ロボット
2日前
株式会社不二越
射出成形機
1か月前
株式会社不二越
射出成形機
27日前
株式会社不二越
射出成形機
26日前
株式会社不二越
金属製保持器
24日前
株式会社不二越
金属製保持器
24日前
株式会社不二越
二段圧力制御弁
1か月前
株式会社不二越
電磁弁制御装置
6日前
株式会社不二越
管用テーパタップ
26日前
株式会社不二越
電食防止軸受構造
25日前
株式会社不二越
圧力制御システム
2日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
超硬合金製ドリル
2日前
株式会社不二越
スカイビングカッタ
19日前
株式会社不二越
通り穴加工用タップ
10日前
株式会社不二越
垂直多関節ロボット
3日前
株式会社不二越
転造加工用平ダイス
1か月前
株式会社不二越
組立式スカイビングカッタ
27日前
株式会社不二越
ブレーキ機構及び回転システム
24日前
株式会社不二越
ロボットの教示システム及び教示方法
24日前
株式会社不二越
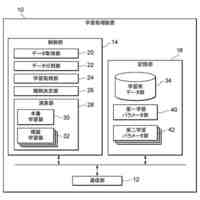
学習処理装置及び学習処理プログラム
1か月前
株式会社不二越
二次電池用通電部品およびその製造方法
12日前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
1か月前
株式会社不二越
酸化皮膜形成用合金鋼、電食防止部品およびその製造方法
2日前
OMC株式会社
ロボット
17日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
10日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
2日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
17日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
個人
バール
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ