TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025046053
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154212
出願日
2023-09-21
発明の名称
入出力信号保持装置及び入出力信号保持装置システム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】電源電位が降下した場合においても入出力信号の論理値を保持できる入出力信号保持装置を提供する。
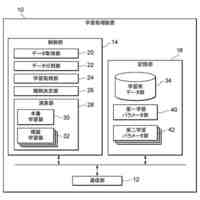
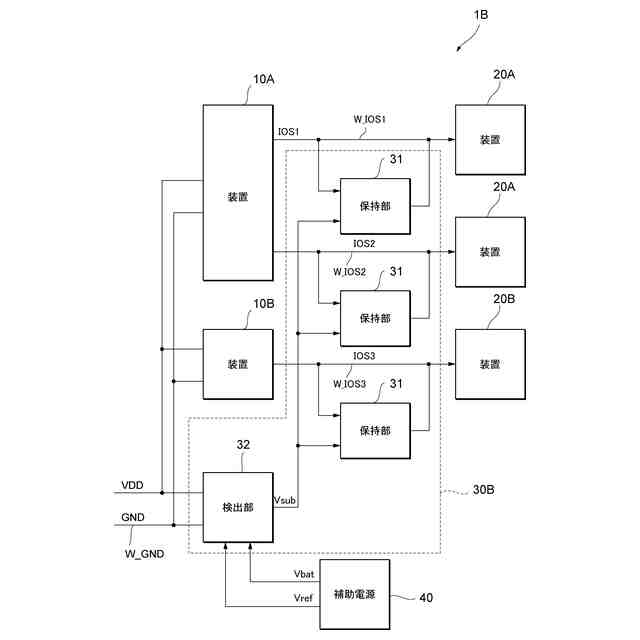
【解決手段】入出力信号保持装置は、第1装置の電源電位が所定電位以下であることを検出する検出部と、第1装置から出力され第2装置に入力される入出力信号の論理値を記憶し、検出部による検出に基づいて、記憶した論理値に入出力信号の論理値を保持する保持部とを備える。
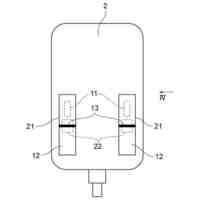
【選択図】図2
特許請求の範囲
【請求項1】
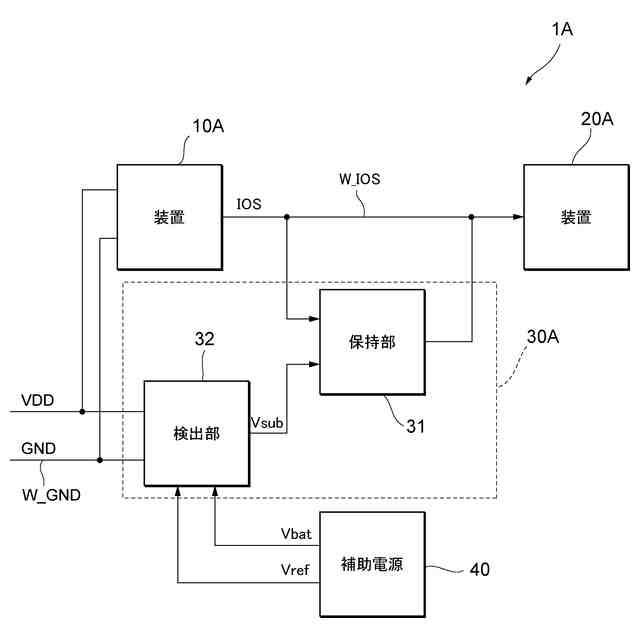
第1装置の電源電位が所定電位以下であることを検出する検出部と、
前記第1装置から出力され第2装置に入力される入出力信号の論理値を記憶し、前記検出部による検出に基づいて、記憶した論理値に前記入出力信号の論理値を保持する保持部と、
を備えることを特徴とする入出力信号保持装置。
続きを表示(約 680 文字)
【請求項2】
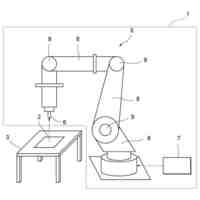
前記第2装置は、ロボット又は前記ロボットに接続されるツールであり、
前記第1装置は、前記第2装置の動作を制御するための制御装置である、
ことを特徴とする請求項1に記載の入出力信号保持装置。
【請求項3】
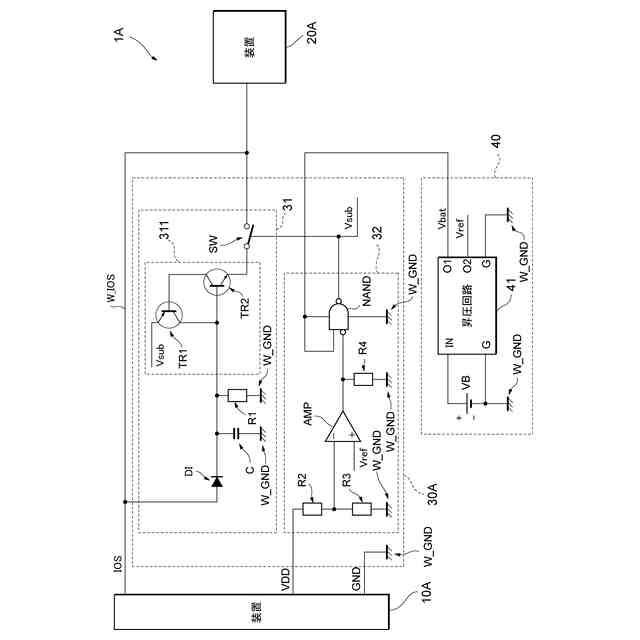
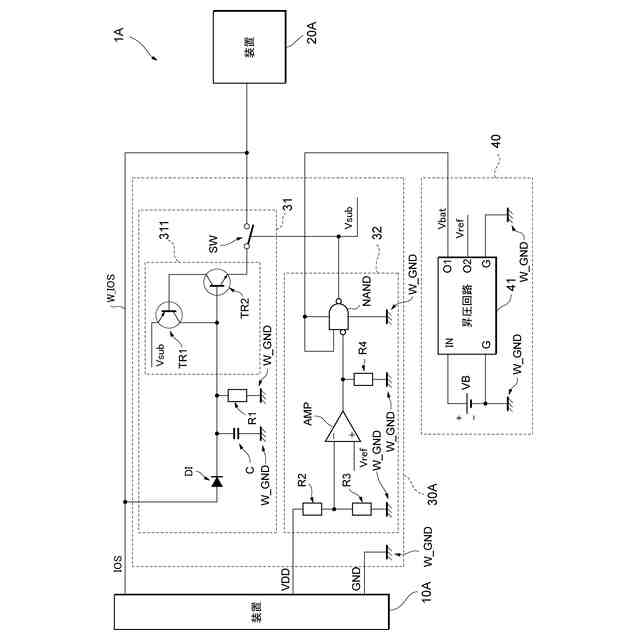
前記保持部は、前記入出力信号を伝達する入出力信号線から一端に電荷が供給される容量素子と、前記検出部の検出結果を示す検出信号の電位が電源として供給され、前記容量素子の前記一端の電位に基づいて前記検出信号の電位を前記入出力信号線に供給するラッチ回路とを有する、
ことを特徴とする備える請求項2に記載の入出力信号保持装置。
【請求項4】
前記検出部は、前記第1装置及び前記第2装置の電源とは異なる電源によって動作する、
ことを特徴とする請求項2又は3に記載の入出力信号保持装置。
【請求項5】
前記保持部は、複数の入出力信号毎に設けられている、
ことを特徴とする請求項2又は3に記載の入出力信号保持装置。
【請求項6】
ツールが接続されるロボットと、
前記ロボット又は前記ツールの動作を制御するための制御装置と、
前記制御装置の電源電位が所定電位以下であることを検出する検出部、及び前記制御装置から出力され前記ツールに入力される入出力信号の論理値を記憶し、前記検出部による検出に基づいて記憶した論理値に前記入出力信号の論理値を保持する保持部を有する入出力信号保持装置と、
を備える入出力信号保持装置システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、入出力信号保持装置及び入出力信号保持装置システムに関する。
続きを表示(約 940 文字)
【背景技術】
【0002】
従来から、異常を検出した際に動作を停止する機能を備えた装置が知られている。
【0003】
これに関し、特許文献1には、操作部に加わる衝撃を検知した際、操作部から制御装置に伝達する入出力信号を遮断する制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2003-288105号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、衝撃や電源電位の降下などの異常の発生時に入出力信号の論理値を保持した方が良い場合においても、入出力信号を遮断してしまうという問題があった。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、電源電位が降下した場合においても、入出力信号の論理値を保持できる入出力信号保持装置及び入出力信号保持装置システムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の入出力信号保持装置は、第1装置の電源電位が所定電位以下であることを検出する検出部と、前記第1装置から出力され第2装置に入力される入出力信号の論理値を記憶し、前記検出部による検出に基づいて、記憶した論理に前記入出力信号の論理値を保持する保持部と、を備える。
【0008】
また、前記第2装置は、ロボット又は前記ロボットに接続されるツールであり、
前記第1装置は、前記第2装置の動作を制御するための制御装置である。
【0009】
また、前記保持部は、前記入出力信号を伝達する入出力信号線から一端に電荷が供給される容量素子と、前記検出部の検出結果を示す検出信号の電位が電源として供給され、前記容量素子の前記一端の電位に基づいて前記検出信号の電位を前記入出力信号線に供給するラッチ回路とを有する。
【0010】
また、前記検出部は、前記第1装置及び前記第2装置の電源とは異なる電源によって動作する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
13日前
株式会社不二越
塗布装置
1か月前
株式会社不二越
ロボット
1か月前
株式会社不二越
射出成形機
25日前
株式会社不二越
NC転造盤
1か月前
株式会社不二越
射出成形機
19日前
株式会社不二越
射出成形機
20日前
株式会社不二越
金属製保持器
17日前
株式会社不二越
金属製保持器
17日前
株式会社不二越
二段圧力制御弁
23日前
株式会社不二越
電食防止軸受構造
18日前
株式会社不二越
管用テーパタップ
19日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
通り穴加工用タップ
3日前
株式会社不二越
基板搬送用ロボット
1か月前
株式会社不二越
転造加工用平ダイス
26日前
株式会社不二越
パイロット型電磁弁
1か月前
株式会社不二越
スカイビングカッタ
12日前
株式会社不二越
ロボット溶接システム
1か月前
株式会社不二越
組立式スカイビングカッタ
20日前
株式会社アイシン
取付具
1か月前
株式会社不二越
ブレーキ機構及び回転システム
17日前
株式会社不二越
学習処理装置及び学習処理プログラム
23日前
株式会社不二越
ロボットの教示システム及び教示方法
17日前
株式会社不二越
二次電池用通電部品およびその製造方法
5日前
株式会社不二越
転造加工用平ダイスおよびその製造方法
1か月前
株式会社不二越
通信端末装置及びロボット制御システム
1か月前
株式会社不二越
マグネットホルダおよびマグネット吸着機構
1か月前
株式会社不二越
マグネットホルダおよびマグネット吸着機構
1か月前
株式会社不二越
ロボット溶接システム及びロボット溶接制御装置
1か月前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
25日前
OMC株式会社
ロボット
10日前
株式会社アイセイ
搬送装置
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
3日前
国立大学法人金沢大学
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ