TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037380
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144282
出願日
2023-09-06
発明の名称
ロボット溶接システム及びロボット溶接制御装置
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B23K
20/12 20060101AFI20250311BHJP(工作機械;他に分類されない金属加工)
要約
【課題】摩擦攪拌溶接における溶接品質を向上することができるロボット溶接システム及びロボット溶接制御装置を提供する。
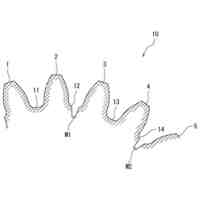
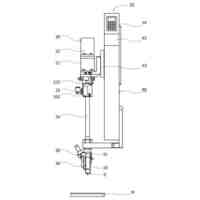
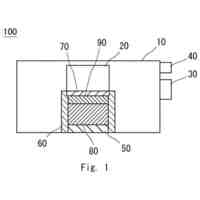
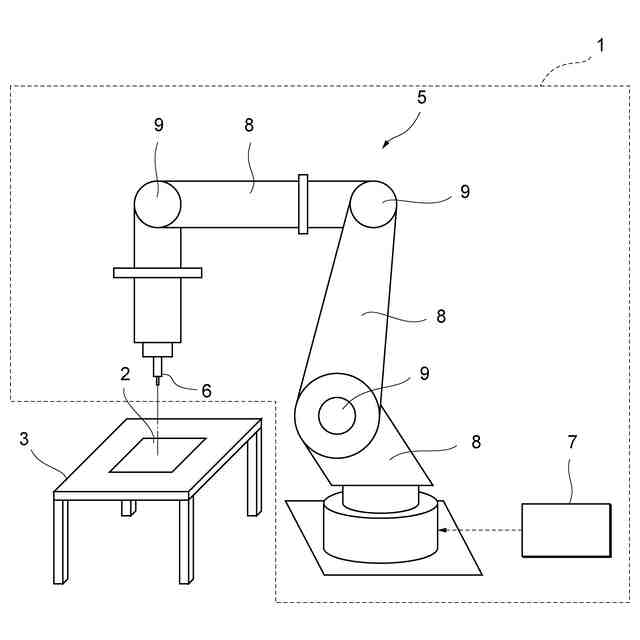
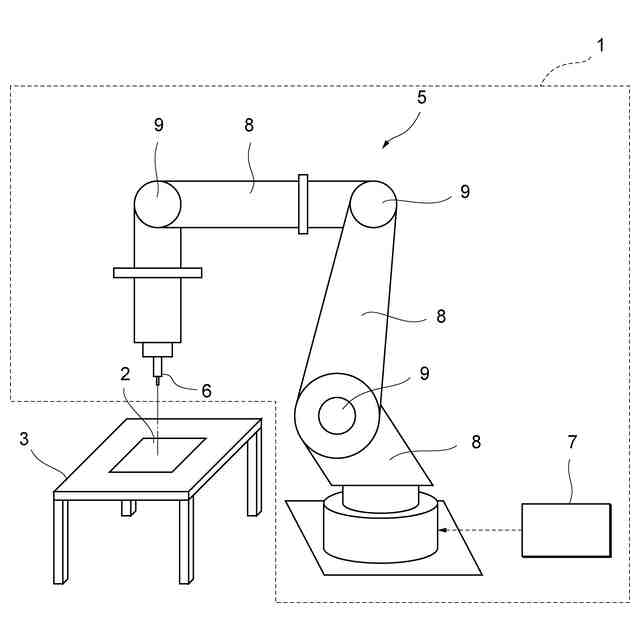
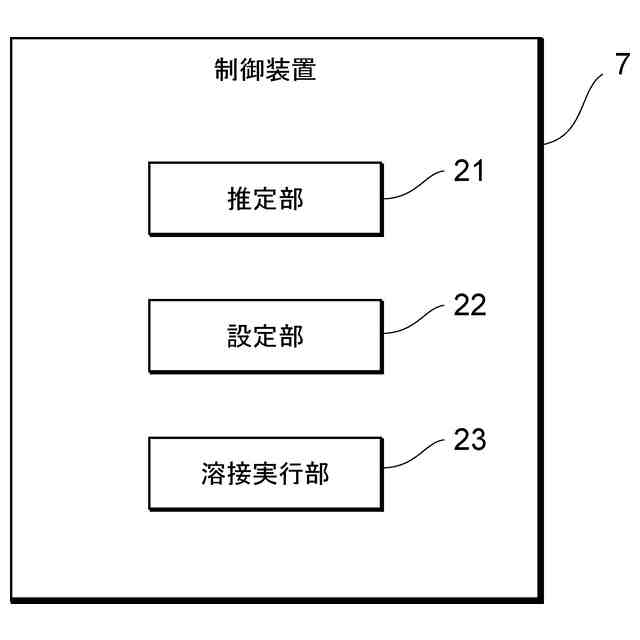
【解決手段】ワーク2を摩擦攪拌溶接するロボット溶接システム1であって、ロボット5と、ロボット5のアーム先端に設けられたスピンドル6と、ロボット5及びスピンドル6の動作を制御する制御装置7と、を備え、制御装置7は、ロボット5のアーム8を用いてスピンドル6をワーク2へ押し付けた場合におけるロボット5の撓み方向を推定する推定部と、撓み方向に基づいて、スピンドル6がワーク2と接触して生じる摩擦力が、撓み方向と反対方向に生じるようにスピンドル6の回転方向を設定する設定部とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを摩擦攪拌溶接するロボット溶接システムであって、
多関節ロボットと、
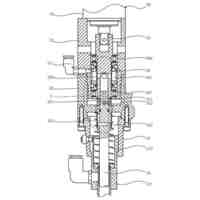
前記多関節ロボットのアーム先端に設けられた回動部材と、
前記多関節ロボット及び前記回動部材の動作を制御する制御装置と、
を備え、
前記制御装置は、
前記多関節ロボットの前記アームを用いて前記回動部材を前記ワークへ押し付けた場合における前記多関節ロボットの撓み方向を推定する推定部と、
前記撓み方向に基づいて、前記回動部材が前記ワークと接触して生じる摩擦力が、前記撓み方向と反対方向に生じるように前記回動部材の回転方向を設定する設定部と、
を有することを特徴とするロボット溶接システム。
続きを表示(約 180 文字)
【請求項2】
前記推定部は、前記回動部材により前記ワークを溶接する前記多関節ロボットの姿勢に基づいて、前記撓み方向を推定することを特徴とする請求項1に記載のロボット溶接システム。
【請求項3】
前記推定部は、前記多関節ロボットの各関節の角度に基づいて、前記撓み方向を推定することを特徴とする請求項2に記載のロボット溶接システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークを摩擦攪拌溶接するロボット溶接システム及びロボット溶接制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
金属の溶接において、摩擦攪拌溶接(摩擦攪拌接合)が用いられる場合がある。摩擦攪拌接合は、例えば、特許文献1に開示されている。また、摩擦攪拌溶接は、例えば電気自動車分野におけるアルミ材部品の溶接に好適であるため、適用拡大が期待されている。
【先行技術文献】
【特許文献】
【0003】
特開2001-340975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、摩擦攪拌溶接において、ロボットのアーム先端に設けられたスピンドルをワークに押し付けながら溶接を行う場合、スピンドルが設けられたロボットの例えば関節に撓みが生じる可能性がある。撓みが生じた場合、スピンドルの位置にずれが生じ溶接品質に影響を及ぼす可能性がある。
【0005】
上記課題に鑑み、本発明は、摩擦攪拌溶接における溶接品質を向上することができるロボット溶接システム及びロボット溶接制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明に係るロボット溶接システムは、ワークを摩擦攪拌溶接するロボット溶接システムであって、多関節ロボットと、前記多関節ロボットのアーム先端に設けられた回動部材と、前記多関節ロボット及び前記回動部材の動作を制御する制御装置と、を備え、前記制御装置は、前記多関節ロボットの前記アームを用いて前記回動部材を前記ワークへ押し付けた場合における前記多関節ロボットの撓み方向を推定する推定部と、前記撓み方向に基づいて、前記回動部材が前記ワークと接触して生じる摩擦力が、前記撓み方向と反対方向に生じるように前記回動部材の回転方向を設定する設定部と、を有する。
【0007】
また、前記ロボット溶接システムにおいて、前記推定部は、前記回動部材により前記ワークを溶接する前記多関節ロボットの姿勢に基づいて、前記撓み方向を推定する。
【0008】
また、前記ロボット溶接システムにおいて、前記推定部は、前記多関節ロボットの各関節の角度に基づいて、前記撓み方向を推定する。
【発明の効果】
【0009】
本発明に係るロボット溶接システム及びロボット溶接制御装置によれば、溶接品質を向上することができる。
【図面の簡単な説明】
【0010】
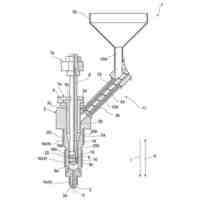
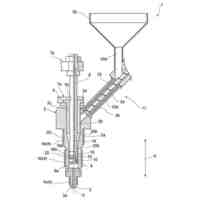
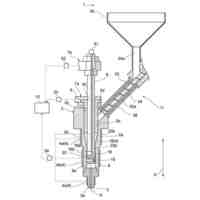
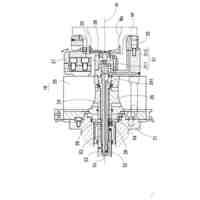
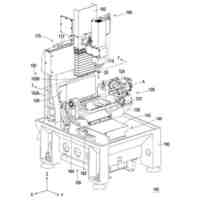
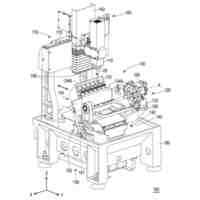
本発明の実施形態に係るロボット溶接システムの全体構成の一例を概略的に示す図である。
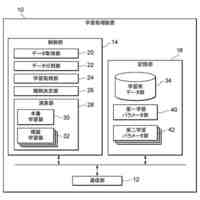
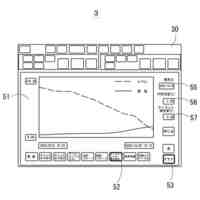
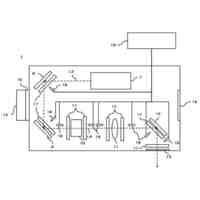
図1のロボット溶接システムが備える制御装置の各種機能の一例を示すブロック図である。
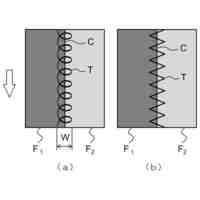
参考例における摩擦攪拌溶接の一例を示す図である。
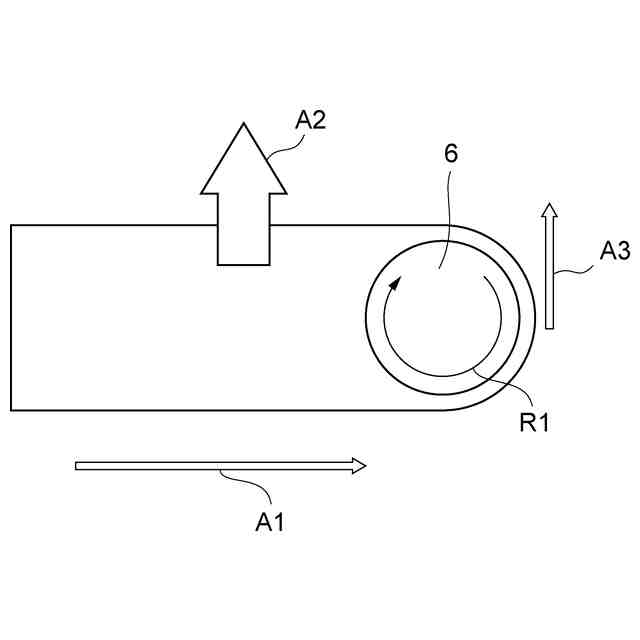
図1のロボット溶接システムにおける摩擦攪拌溶接の一例を示す図である。
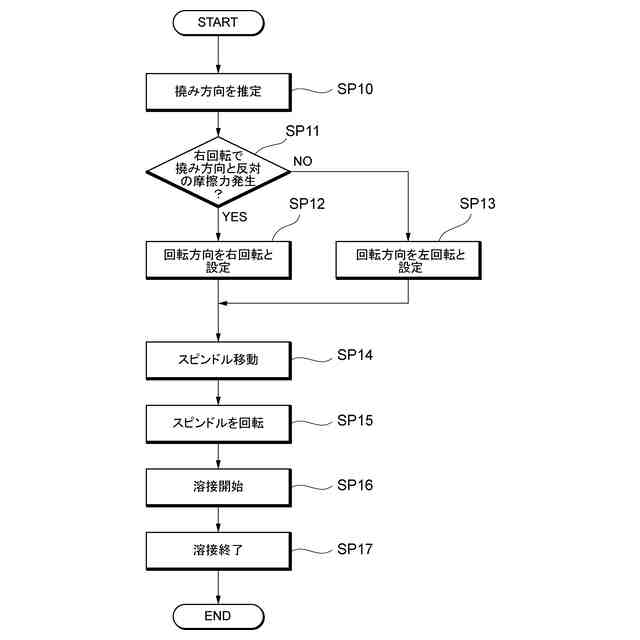
図1のロボット溶接システムにおける摩擦攪拌溶接処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
13日前
株式会社不二越
ロボット
1か月前
株式会社不二越
射出成形機
20日前
株式会社不二越
射出成形機
25日前
株式会社不二越
射出成形機
19日前
株式会社不二越
金属製保持器
17日前
株式会社不二越
金属製保持器
17日前
株式会社不二越
二段圧力制御弁
23日前
株式会社不二越
電食防止軸受構造
18日前
株式会社不二越
管用テーパタップ
19日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
スカイビングカッタ
12日前
株式会社不二越
転造加工用平ダイス
26日前
株式会社不二越
通り穴加工用タップ
3日前
株式会社不二越
組立式スカイビングカッタ
20日前
株式会社不二越
ブレーキ機構及び回転システム
17日前
株式会社不二越
ロボットの教示システム及び教示方法
17日前
株式会社不二越
学習処理装置及び学習処理プログラム
23日前
株式会社不二越
二次電池用通電部品およびその製造方法
5日前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
25日前
日東精工株式会社
ねじ締め機
17日前
株式会社不二越
ドリル
13日前
日東精工株式会社
ねじ締め装置
1か月前
日東精工株式会社
多軸ねじ締め機
17日前
有限会社 ナプラ
金属粒子
1か月前
株式会社FUJI
工作機械
20日前
トヨタ自動車株式会社
接合方法
11日前
株式会社FUJI
チャック装置
1か月前
ブラザー工業株式会社
工作機械
18日前
ブラザー工業株式会社
工作機械
18日前
株式会社プロテリアル
金属箔の溶接方法
17日前
オークマ株式会社
工作機械
1か月前
株式会社ダイヘン
溶接装置
10日前
津田駒工業株式会社
2連回転割出し装置
1か月前
大肯精密株式会社
自動送り穿孔機
11日前
ビアメカニクス株式会社
レーザ加工装置
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ