TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031124
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023137123
出願日
2023-08-25
発明の名称
ロボット
出願人
国立大学法人金沢大学
代理人
個人
主分類
B25J
15/08 20060101AFI20250228BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット本体の先端部における回転動作をロボットハンドの動作に変換することができるロボットを提供する。
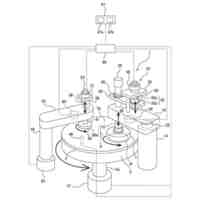
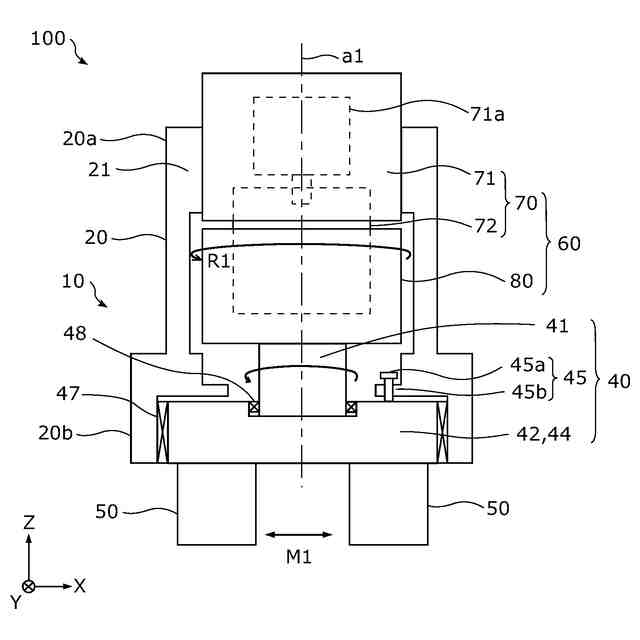
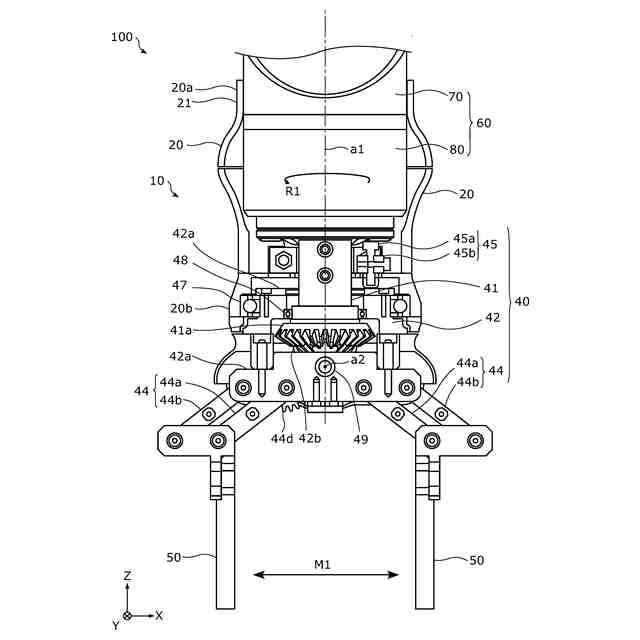
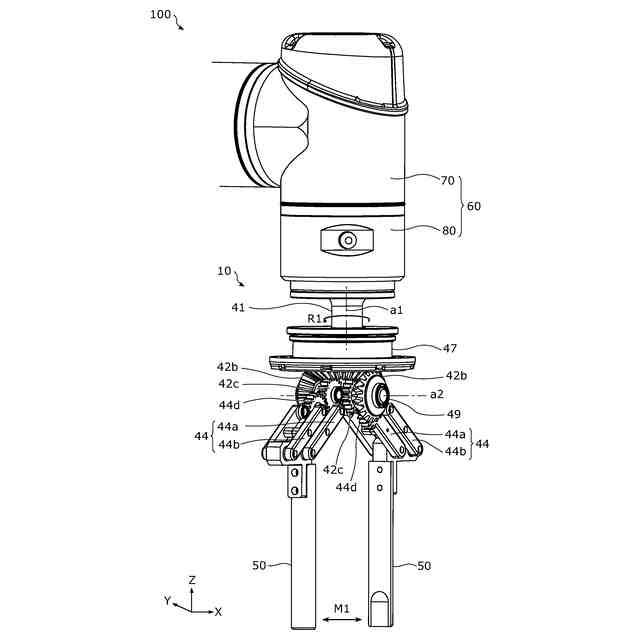
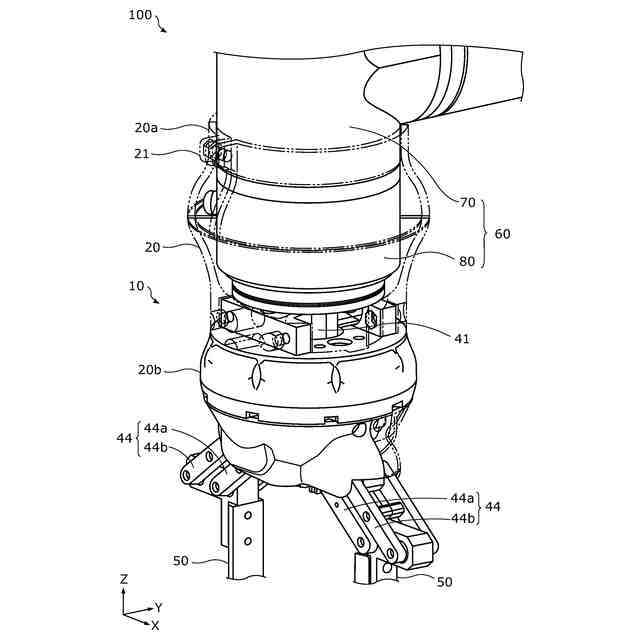
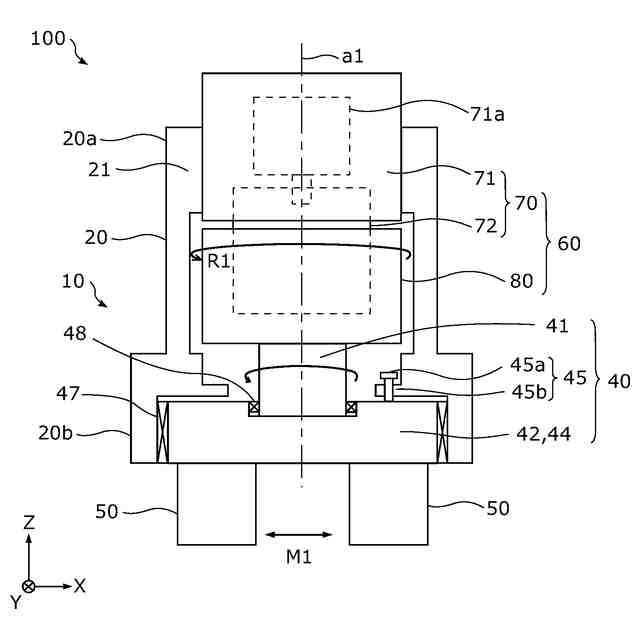
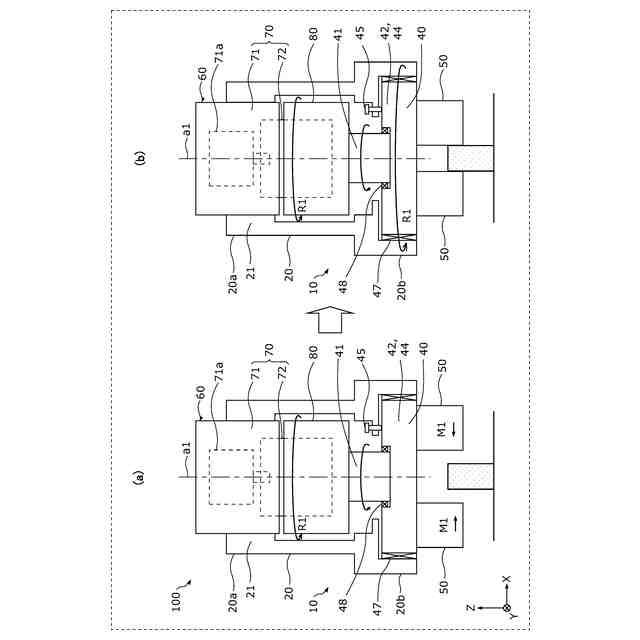
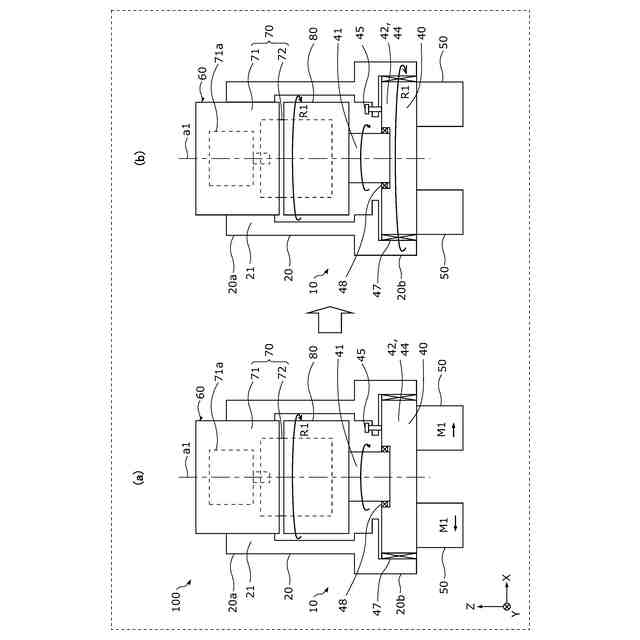
【解決手段】ロボット100は、第1軸a1を中心に回転する第1回転動作R1を生成する支持部70と、第1回転動作R1に伴って第1軸a1を中心に回転する回転部80と、支持部70に固定された固定部20と、回転部80及び固定部20のそれぞれに接続される動作変換部40と、を備える。動作変換部40は、回転部80を介して第1回転動作R1を受け付け、(1)第1回転動作R1を並進動作M1に変換すること、及び、(2)第1回転動作R1を第1軸a1とは異なる他軸を中心に回転する他の回転動作R2に変換することの少なくとも一方の変換を行う。
【選択図】図7
特許請求の範囲
【請求項1】
第1軸を中心に回転する第1回転動作を生成する支持部と、
前記第1回転動作に伴って前記第1軸を中心に回転する回転部と、
前記支持部に固定された固定部と、
前記回転部及び前記固定部のそれぞれに接続される動作変換部と、
を備え、
前記動作変換部は、前記回転部を介して前記第1回転動作を受け付け、
(1)前記第1回転動作を並進動作に変換すること、及び、
(2)前記第1回転動作を前記第1軸とは異なる他軸を中心に回転する他の回転動作に変換すること
の少なくとも一方の変換を行う
ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記動作変換部は、前記第1回転動作を並進動作に変換すること、及び、前記第1回転動作を前記並進動作に変換せず前記第1回転動作を出力すること、を選択的に行う
請求項1に記載のロボット。
【請求項3】
前記動作変換部は、前記並進動作の動きが制限されたときに前記第1回転動作を前記並進動作へ変換せず、自身が前記第1回転動作を行う
請求項2に記載のロボット。
【請求項4】
さらに、前記動作変換部が前記第1回転動作を並進動作に変換すること、及び、前記動作変換部が前記第1回転動作を行うことの切り替えを行うためのスイッチを備える
請求項2に記載のロボット。
【請求項5】
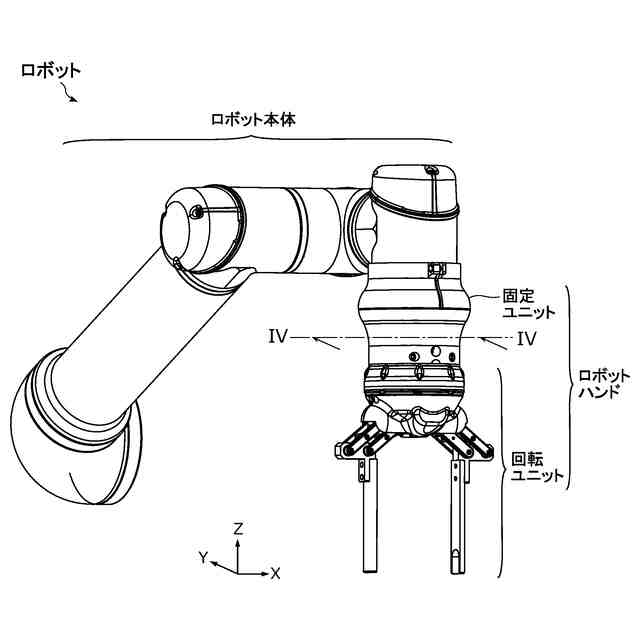
前記ロボットは、ロボット本体と、前記ロボット本体に接続されるロボットハンドとを含み、
前記支持部及び前記回転部は、前記ロボット本体に設けられ、
前記固定部及び前記動作変換部は、前記ロボットハンドに設けられ、
前記ロボットハンドには、前記第1回転動作を生成するためのモータが設けられておらず、
前記支持部には、前記第1回転動作を生成するためのモータが設けられている
請求項1~4のいずれかに記載のロボット。
【請求項6】
前記支持部は、前記第1軸を中心に回転する回転軸と、前記回転軸を回転可能に支持する基体部と、を有し、
前記回転部は、前記第1軸の軸方向において前記基体部と前記動作変換部との間に配置されて、前記第1軸の軸方向に延びる前記回転軸に接続され、
前記固定部は、前記回転部に接触せず前記回転部の外周を覆い、前記基体部に固定されている
請求項1~4のいずれかに記載のロボット。
【請求項7】
前記固定部は、前記支持部に接するクランプ部を有し、前記クランプ部を用いて前記支持部に固定されている
請求項1~4のいずれかに記載のロボット。
【請求項8】
前記固定部は、筒状であり、一端が前記支持部に固定され、他端がベアリングを介して前記動作変換部に接続され、
前記動作変換部の少なくとも一部は、前記ベアリングを介し前記固定部に対して回転可能である
請求項2~4のいずれかに記載のロボット。
【請求項9】
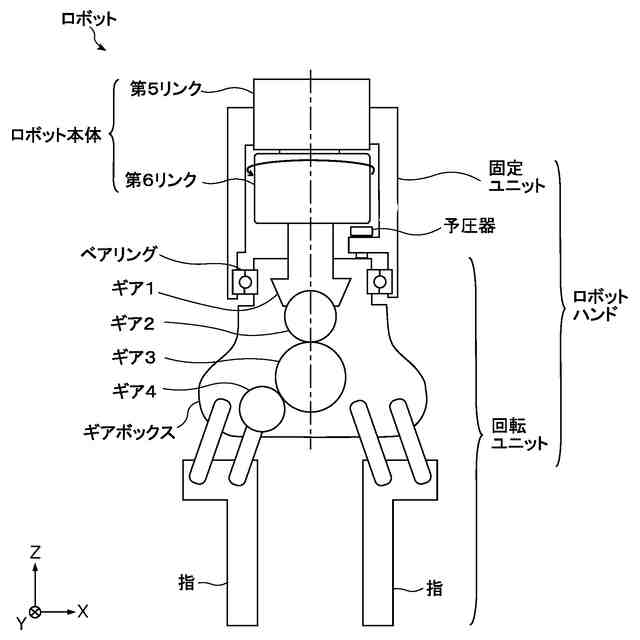
前記動作変換部は、前記回転部に接続され前記第1回転動作を伝達する伝達部と、前記伝達部に接続され前記第1回転動作に伴って回転可能なギアボックスと、前記ギアボックスの回転を制限する回転制限部と、を有し、
前記回転制限部は、前記固定部に取り付けられ、前記ギアボックスを押圧することで前記ギアボックスの回転を制限する
請求項8に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドを備えるロボットに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1には、ATCにより着脱可能な複数種類のツールを1個の電動モータで駆動する産業用ロボットが開示されている。
【0003】
非特許文献1には、ロボット本体に接続されるロボットハンドが開示されている。このロボットハンドは、駆動源であるモータを有しており、モータによってフィンガーを開閉し、また、手首を回転するように構成されている。
【先行技術文献】
【特許文献】
【0004】
特開2009-184099号公報
【非特許文献】
【0005】
西村 斉寛、他3名、“手首回転機構を有する1自由度ロボットグリッパの開発”、ロボティクス・メカトロニクス 講演会2022、2022年6月、一般社団法人 日本機械学会
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されたロボットは、各ツールに応じた動作しかできず、例えばロボットハンドのフィンガーを開閉させたり、手首を回転させたりすることが困難である。
【0007】
非特許文献1に開示されたロボットハンドは、フィンガーを開閉させること、及び、手首を回転させることが可能である。しかし、ロボットハンドの内部にモータが設けられているため、ロボット全体としてみたときにモータの数が1つ付加される。
【0008】
例えば、マニピュレータなどのロボット本体がその先端部において回転動作機能を有している場合、ロボット本体の回転動作機能を用いてフィンガーを開閉させ、また、手首を回転させることができれば、ロボット全体としてのモータの数を減らすことができる。
【0009】
本発明は、ロボット本体の先端部における回転動作をロボットハンドの動作に変換することができるロボットを提供する。
【課題を解決するための手段】
【0010】
上記の課題を達成するため、本発明の一形態におけるロボットは、第1軸を中心に回転する第1回転動作を生成する支持部と、前記第1回転動作に伴って前記第1軸を中心に回転する回転部と、前記支持部に固定された固定部と、前記回転部及び前記固定部のそれぞれに接続される動作変換部と、を備え、前記動作変換部は、前記回転部を介して前記第1回転動作を受け付け、(1)前記第1回転動作を並進動作に変換すること、及び、(2)前記第1回転動作を前記第1軸とは異なる他軸を中心に回転する他の回転動作に変換することの少なくとも一方の変換を行う。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人金沢大学
ロボット
8か月前
国立大学法人金沢大学
がん細胞株
8か月前
国立大学法人金沢大学
微粒子の製造装置
3か月前
国立大学法人金沢大学
燃料電池システム
8か月前
国立大学法人金沢大学
燃料電池システム
5か月前
国立大学法人金沢大学
燃料電池システム
2か月前
国立大学法人金沢大学
腫瘍治療用医薬組成物
2か月前
国立大学法人金沢大学
太陽電池とその製造方法
7か月前
国立大学法人金沢大学
聴覚器官用の状態評価装置
1か月前
国立大学法人金沢大学
放射性同位体標識診療薬剤
7か月前
株式会社小松製作所
伸縮機構
8か月前
国立大学法人金沢大学
双性イオンを含む植物成長抑制剤
1か月前
国立大学法人金沢大学
金属錯体及び金属錯体の製造方法
2か月前
ミツテック株式会社
物体形状計測装置
8か月前
国立大学法人金沢大学
パターニングされた酸化物膜の形成方法
1か月前
株式会社小松製作所
カメラシステム及び作業車両
8か月前
国立大学法人金沢大学
糖化されたタンパク質の蓄積を抑制するための組成物
1日前
国立大学法人金沢大学
形状推定方法、プログラム、形状推定装置、及び自律移動体
8か月前
国立大学法人金沢大学
情報処理システム、合成装置、情報処理方法及びプログラム
2か月前
国立大学法人金沢大学
対象物検出方法、プログラム、対象物検出装置、及び自律移動体
5か月前
国立大学法人金沢大学
がん関連アミノ酸輸送体ASCTの機能を測定するための検査薬
15日前
国立大学法人金沢大学
子宮体癌治療剤、子宮体癌治療方法、子宮体癌の治療のための使用
8か月前
国立大学法人金沢大学
点滅領域検出方法、プログラム、点滅領域検出装置、及び自律移動体
2か月前
国立大学法人金沢大学
音源方向検出方法、プログラム、音源方向検出装置、及び自律移動体
6か月前
石川県
姿勢保持具、移乗器具、支持用ベルト、及び、支持ベルトの設置方法
1か月前
国立大学法人金沢大学
追従対象車両決定方法、プログラム、追従対象車両決定装置、及び自律移動体
5か月前
国立大学法人金沢大学
死角領域抽出方法、走行制御方法、プログラム、死角領域抽出装置、及び移動体
1日前
国立大学法人金沢大学
薄膜デバイス、薄膜デバイスモジュール、電極付き封止材及び薄膜デバイスの製造方法
2か月前
学校法人東海大学
トランスフェリンレセプターを認識する物質を含む治療剤の用法用量
15日前
国立大学法人金沢大学
CAR-T細胞活性化、造血幹細胞増殖、iPS細胞分化を制御する組成物およびその用途
5か月前
国立大学法人金沢大学
ペロブスカイト膜、薄膜太陽電池、ペロブスカイト膜の製造方法及び薄膜太陽電池の製造方法
3か月前
株式会社荏原製作所
ワークピースの化学機械研磨システムおよび化学機械研磨方法
4か月前
一般財団法人電力中央研究所
直流遮断器
5か月前
国立大学法人金沢大学
AN陰影を含む生体画像からAN陰影のみの画像又はAN陰影を低減した画像を生成する画像生成装置、画像生成用学習済みモデル、画像生成用データ構造、画像生成用プログラム及び診断支援方法
9日前
国立大学法人金沢大学
重なって投影される2以上の対象物A1-Nを含む生体画像から対象物A1及び対象物ANをそれぞれ識別した画像を生成する画像生成装置、画像生成用学習済みモデル、画像生成用データ構造、画像生成用プログラム及び診断支援方法
9日前
個人
フラワーホッチキス。
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ