TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074716
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185721
出願日
2023-10-30
発明の名称
対象物検出方法、プログラム、対象物検出装置、及び自律移動体
出願人
国立大学法人金沢大学
代理人
個人
主分類
G08G
1/16 20060101AFI20250507BHJP(信号)
要約
【課題】対象物を精度良く検出する。
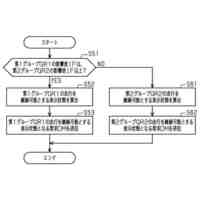
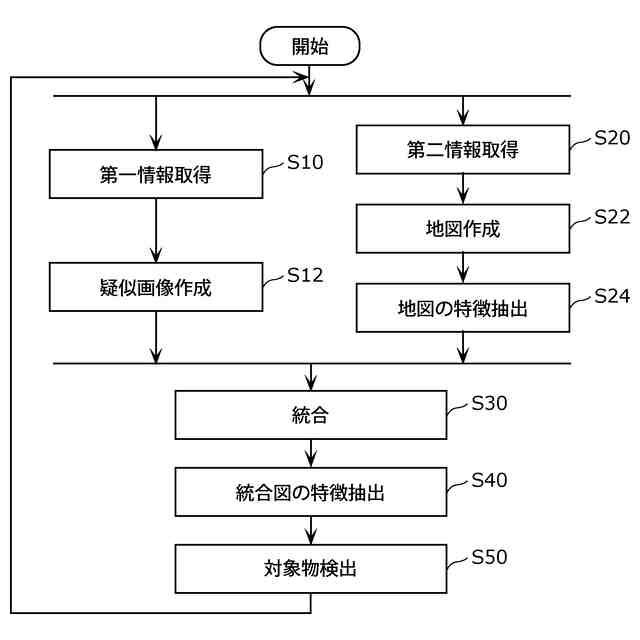
【解決手段】対象物検出方法は、所定の対象物を検出する対象物検出方法であって、第一センサ10によって取得される第一情報に基づく疑似画像を作成する疑似画像作成ステップS12と、第二センサ20によって取得される第二情報に基づいて地図を作成する地図作成ステップS22と、疑似画像と地図とが統合された統合図を作成する統合ステップS30と、統合図から対象物を検出する検出ステップS50とを含み、第一情報は、複数の距離測定点である第一点群を含む。
【選択図】図9
特許請求の範囲
【請求項1】
所定の対象物を検出する対象物検出方法であって、
第一センサによって取得される第一情報に基づく疑似画像を作成する疑似画像作成ステップと、
第二センサによって取得される第二情報に基づいて地図を作成する地図作成ステップと、
前記疑似画像と前記地図とが統合された統合図を作成する統合ステップと、
前記統合図から前記対象物を検出する検出ステップとを含み、
前記第一情報は、複数の距離測定点である第一点群を含む
対象物検出方法。
続きを表示(約 900 文字)
【請求項2】
前記第二センサは、カメラを含み、
前記地図は、前記対象物の存在確率の分布を示す確率地図である
請求項1に記載の対象物検出方法。
【請求項3】
前記地図は、前記第二情報に基づいて検出された前記対象物の推定位置を中心とし、当該推定位置の誤差を示す誤差楕円を含む
請求項1又は2に記載の対象物検出方法。
【請求項4】
前記誤差楕円の長径方向は、前記第二センサと、前記第二情報に基づいて検出された前記対象物とを結ぶ方向である
請求項3に記載の対象物検出方法。
【請求項5】
前記統合ステップにおいて、前記疑似画像から抽出される、前記疑似画像の各画素における特徴量と、前記地図から抽出される、前記地図の各画素における特徴量とを重ね合わせることで前記統合図を作成する
請求項1又は2に記載の対象物検出方法。
【請求項6】
前記検出ステップにおいて、前記統合図に含まれる特徴量に基づいて、前記対象物の位置、及び、クラスを推定する
請求項5に記載の対象物検出方法。
【請求項7】
前記統合図に含まれる特徴量は、学習済みの機械学習モデルを用いて抽出される
請求項6に記載の対象物検出方法。
【請求項8】
前記機械学習モデルの学習において、前記地図の教師データとして、前記第一点群を用いる
請求項7に記載の対象物検出方法。
【請求項9】
前記第二情報は、複数の距離測定点である第二点群を含み、
前記地図は、前記第二点群に基づいて作成されたオルソ地図である
請求項1に記載の対象物検出方法。
【請求項10】
前記統合ステップにおいて、前記疑似画像から抽出される、前記疑似画像の各画素における特徴量と、前記オルソ地図から抽出される、前記オルソ地図の各画素における特徴量とを重ね合わせて前記統合図を作成する
請求項9に記載の対象物検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物検出方法、プログラム、対象物検出装置、及び自律移動体に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、自動車等の移動体の自動運転に関する研究が活発に進められている。移動体の自動運転に必要な技術の一つに周辺環境認識があり、自動運転車は、LiDAR(Light Detection and Ranging)などのセンサを用いて、周辺環境の認識を行う。周辺環境の認識において、自車両以外の車両などの検出が特に重要である。
【0003】
自車両以外の車両などの検出対象物を精度良く検出するために、二つの異なるセンサを用いる技術が知られている(例えば、特許文献1、2など)。
【0004】
特許文献1、2に記載された技術では、LiDARから得られる3D点群と、カメラ画像とを融合することで、対象物の検出精度を高めようとしている。
【先行技術文献】
【特許文献】
【0005】
韓国特許第10-2168753号公報
韓国公開特許第10-2019-0095592号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1、2に記載された技術によっても誤検出を十分に低減できない。
【0007】
そこで、本発明は、対象物を精度良く検出することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の一態様に係る対象物検出方法は、所定の対象物を検出する対象物検出方法であって、第一センサによって取得される第一情報に基づく疑似画像を作成する疑似画像作成ステップと、第二センサによって取得される第二情報に基づいて地図を作成する地図作成ステップと、前記疑似画像と前記地図とが統合された統合図を作成する統合ステップと、前記統合図から前記対象物を検出する検出ステップとを含み、前記第一情報は、複数の距離測定点である第一点群を含む。
【0009】
また、上記目的を達成するために、本発明の一態様に係るプログラムは、上記対象物検出方法をコンピュータに実行させるためのプログラムである。
【0010】
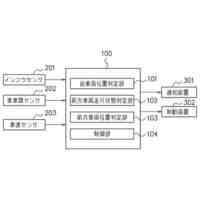
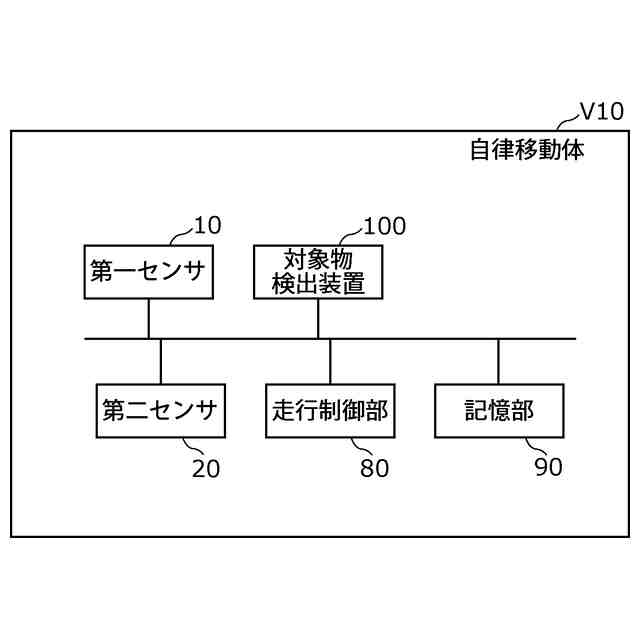
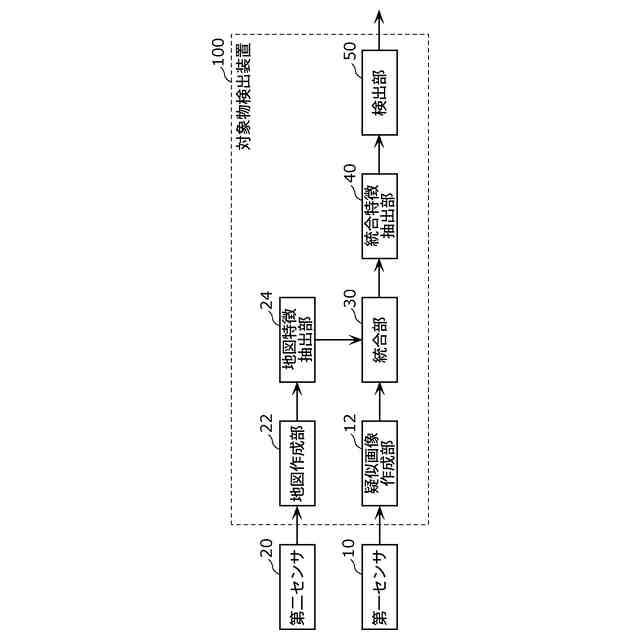
また、上記目的を達成するために、本発明の一態様に係る対象物検出装置は、所定の対象物を検出する対象物検出装置であって、第一センサによって取得される第一情報に基づく疑似画像を作成する疑似画像作成部と、第二センサによって取得される第二情報に基づいて地図を作成する地図作成部と、前記疑似画像と前記地図とが統合された統合図を作成する統合部と、前記統合図から前記対象物を検出する検出部とを含み、前記第一情報は、複数の距離測定点である第一点群を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人金沢大学
微粒子の製造装置
1か月前
国立大学法人金沢大学
燃料電池システム
4か月前
国立大学法人金沢大学
燃料電池システム
29日前
国立大学法人金沢大学
腫瘍治療用医薬組成物
1か月前
国立大学法人金沢大学
放射性同位体標識診療薬剤
5か月前
国立大学法人金沢大学
金属錯体及び金属錯体の製造方法
1か月前
国立大学法人金沢大学
情報処理システム、合成装置、情報処理方法及びプログラム
21日前
国立大学法人金沢大学
対象物検出方法、プログラム、対象物検出装置、及び自律移動体
4か月前
国立大学法人金沢大学
点滅領域検出方法、プログラム、点滅領域検出装置、及び自律移動体
28日前
国立大学法人金沢大学
音源方向検出方法、プログラム、音源方向検出装置、及び自律移動体
4か月前
国立大学法人金沢大学
追従対象車両決定方法、プログラム、追従対象車両決定装置、及び自律移動体
3か月前
石川県
姿勢保持具、移乗器具、支持用ベルト、及び、支持ベルトの設置方法
7日前
国立大学法人金沢大学
薄膜デバイス、薄膜デバイスモジュール、電極付き封止材及び薄膜デバイスの製造方法
1か月前
国立大学法人金沢大学
CAR-T細胞活性化、造血幹細胞増殖、iPS細胞分化を制御する組成物およびその用途
3か月前
国立大学法人金沢大学
ペロブスカイト膜、薄膜太陽電池、ペロブスカイト膜の製造方法及び薄膜太陽電池の製造方法
1か月前
株式会社荏原製作所
ワークピースの化学機械研磨システムおよび化学機械研磨方法
2か月前
一般財団法人電力中央研究所
直流遮断器
4か月前
日本精機株式会社
警報システム
25日前
個人
自動電動車椅子
8日前
スズキ株式会社
運転支援装置
24日前
エムケー精工株式会社
車両誘導装置
1か月前
ニッタン株式会社
検知器
16日前
ニッタン株式会社
検知器
16日前
ニッタン株式会社
発信機
1か月前
株式会社国際電気
防災システム
28日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
検知器
18日前
トヨタ自動車株式会社
車両
1か月前
個人
乗り物の移動を支援する方法及び装置
2か月前
トヨタ自動車株式会社
サーバ
1日前
株式会社小糸製作所
移動体検出装置
18日前
日本信号株式会社
異常走行検出装置
1日前
日本精機株式会社
報知装置及び報知システム
7日前
株式会社小糸製作所
車両検出システム
18日前
個人
現示内容に関する情報放送機能付き信号機
2か月前
能美防災株式会社
火災感知器
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ