TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138032
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024036737
出願日
2024-03-11
発明の名称
異常走行検出装置
出願人
日本信号株式会社
代理人
個人
主分類
G08G
1/017 20060101AFI20250917BHJP(信号)
要約
【課題】遠方の領域や近方の領域に存在する異常走行車両を迅速かつ確実に判定すること。
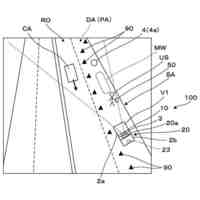
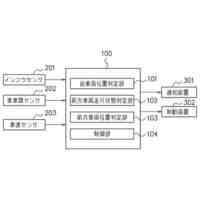
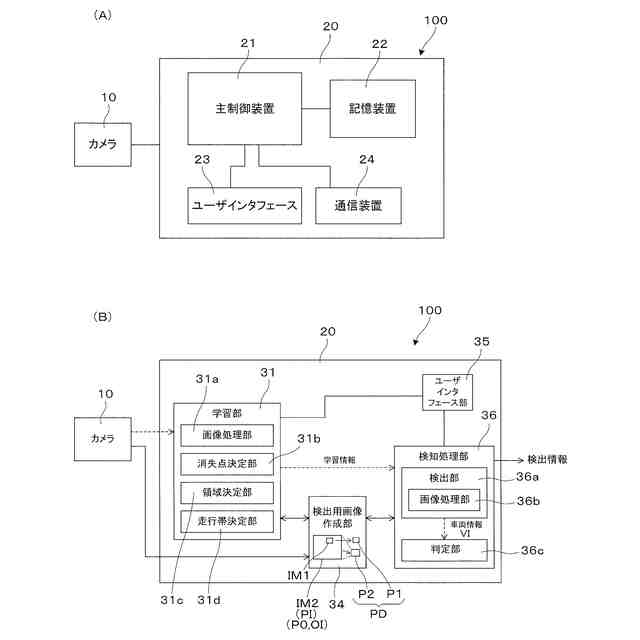
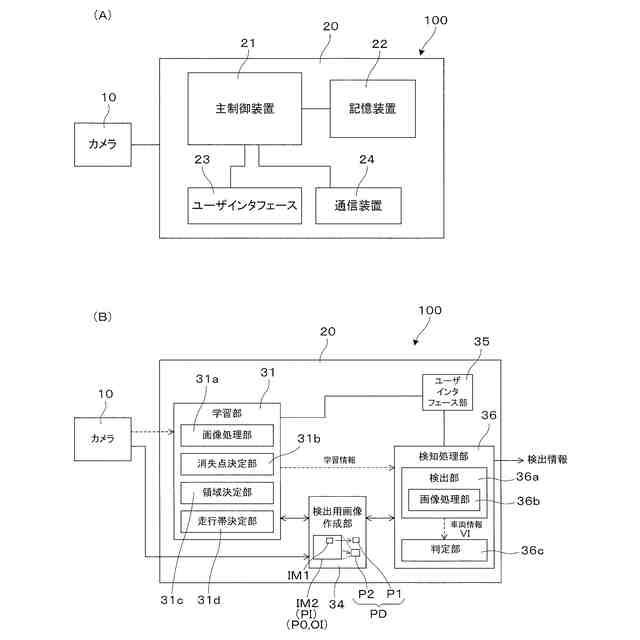
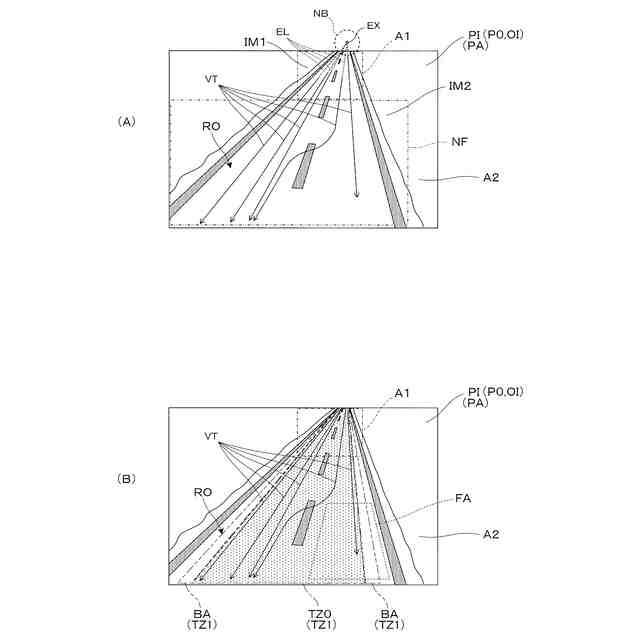
【解決手段】異常走行検出装置100は、事前に行う設定処理段階で、撮影された事前画像P0から消失点EXを求め、撮影範囲PA内において消失点EXの近傍を含む第1領域A1を決定する学習部31と、検知処理段階で、撮影された対象画像OIのうち第1領域A1における圧縮度の低い画像P1と、対象画像OIのうち近隣NF側を含む第2領域A2における圧縮度の高い画像P2とから、車両情報VIを検出する検出部36aと、車両情報VIに基づいて異常走行であるか否かを判定する判定部36cとを備える。
【選択図】図1
特許請求の範囲
【請求項1】
事前に行う設定処理段階で、撮影された事前画像から消失点を求め、撮影範囲内において前記消失点の近傍を含む第1領域を決定する学習部と、
検知処理段階で、撮影された対象画像のうち前記第1領域における圧縮度の低い画像と、前記対象画像のうち近隣側を含む第2領域における圧縮度の高い画像とから、車両情報を検出する検出部と、
前記車両情報に基づいて異常走行であるか否かを判定する判定部と、
を備える異常走行検出装置。
続きを表示(約 730 文字)
【請求項2】
前記第1領域における前記圧縮度の低い画像は、前記第1領域における圧縮されてない画像である、請求項1に記載の異常走行検出装置。
【請求項3】
前記学習部は、前記事前画像から車両を抽出し、前記車両の移動軌跡から前記消失点を決定する、請求項1に記載の異常走行検出装置。
【請求項4】
前記学習部は、前記事前画像を圧縮した画像から車両を抽出することによって前記消失点を決定する、請求項3に記載の異常走行検出装置。
【請求項5】
前記第2領域は、撮影された対象画像の全体を含む、請求項1に記載の異常走行検出装置。
【請求項6】
前記検出部は、車両抽出用の学習済みモデルを用いて、前記第1領域の圧縮度の低い画像と前記第2領域の圧縮度の高い画像とから車両情報を検出する、請求項1に記載の異常走行検出装置。
【請求項7】
前記検出部は、前記第1領域で得た前記車両情報と、前記第2領域で得た前記車両情報とを統合することによって車両を区別する、請求項6に記載の異常走行検出装置。
【請求項8】
前記学習部は、前記移動軌跡から通常の走行軌跡帯を決定する、請求項3に記載の異常走行検出装置。
【請求項9】
前記判定部は、前記車両情報に含まれる車両の座標が前記通常の走行軌跡帯から所定以上離間する場合に、前記車両が異常走行を行っていると判定する、請求項8に記載の異常走行検出装置。
【請求項10】
前記判定部は、前記車両情報に含まれる車両の速度が所定以上である場合に、前記車両が異常走行を行っていると判定する、請求項8に記載の異常走行検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば事故を起こすおそれのある異常走行車両を検出する異常走行検出装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
車両前方の障害物を検出する障害物検出装置として、道路の境界情報から消失点を算出し、消失点近傍を拡大した拡大画像を生成し、時間的に前の拡大画像を距離に応じた変換拡大画像に変換し、これらを比較した差分画像に対して所定閾値による2値化を行うことで障害物を検出するものが公知となっている(特許文献1)。
【0003】
上記特許文献1の装置は、危険走行を検出するものではなく、障害物を検出できたとしても、危険走行検出への応用は必ずしも容易でない。また、上記特許文献1の手法では、夜間等において鮮明な画像が取得できず、障害物を精度よく検出できない可能性がある。
【0004】
なお、道路を監視するカメラによって撮影した画像をAI画像処理することによって危険走行を判定することも考えられるが、AI画像処理は、処理負荷が高く、リアルタイム性を求めるとハードスペックを高くするか、画像を縮小して処理する画素数を少なくする必要がある。画像を縮小する場合、遠方の車両を検出しにくくなる。以上の問題を解決する手法として、画像全体から一部を切り出して判定を行なうことも考えられるが、切り出す位置を設定しなければならず、設置場所が頻繁に変わる用途の場合、構図変化に応じて設定を変更する手間がかかり、設定に知識が必要なことから使い勝手が悪くなる。
【先行技術文献】
【特許文献】
【0005】
特開2011-170568号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記背景技術に鑑みてなされたものであり、遠方の領域や近方の領域に存在する異常走行車両を迅速かつ確実に判定することを目的とする。
【0007】
上記目的を達成するため、本発明に係る異常走行検出装置は、事前に行う設定処理段階で、撮影された事前画像から消失点を求め、撮影範囲内において消失点の近傍を含む第1領域を決定する学習部と、検知処理段階で、撮影された対象画像のうち第1領域における圧縮度の低い画像と、対象画像のうち近隣側を含む第2領域における圧縮度の高い画像とから、車両情報を検出する検出部と、車両情報に基づいて異常走行であるか否かを判定する判定部とを備える。
【0008】
上記異常走行検出装置では、検出部が、検知処理段階で、撮影された対象画像のうち第1領域における圧縮度の低い画像と、対象画像のうち近隣側を含む第2領域における圧縮度の高い画像とから、車両情報を検出するので、遠方を対象とする第1領域については、圧縮の低い画像によって高精度で車両情報を取得でき、主に近隣を対象とする第2領域については、圧縮度の高い画像によって比較的高速で車両情報を取得できる。これにより、遠方から近方の領域までの広域に亘って、道路を走行する車両を迅速かつ確実に監視することができ、異常走行の判定の信頼性を高めることができる。
【図面の簡単な説明】
【0009】
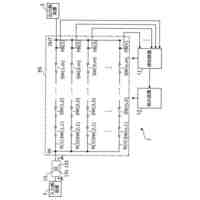
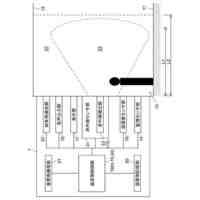
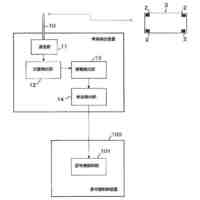
(A)及び(B)は、実施形態の異常走行検出装置を説明するブロック図である。
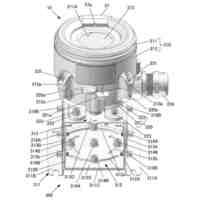
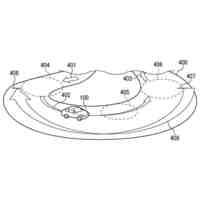
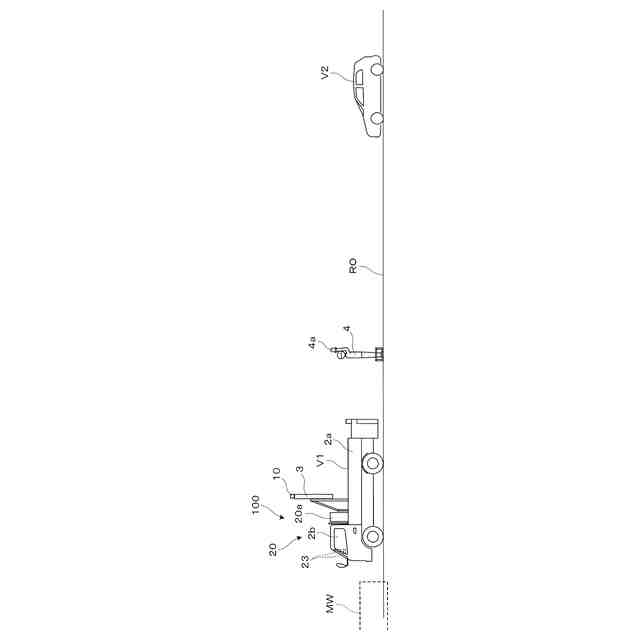
異常走行検出装置の設置状態を示す図である。
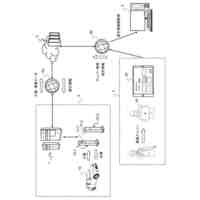
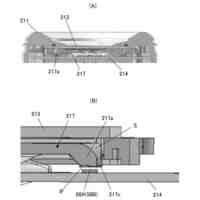
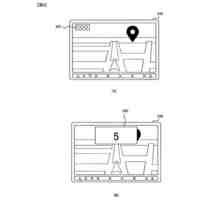
(A)は、消失点決定部の動作を説明する概念図であり、(B)は、走行帯決定部の動作を説明する概念図である。
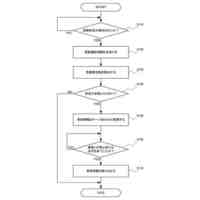
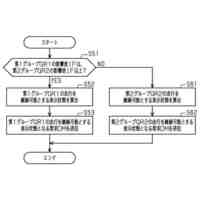
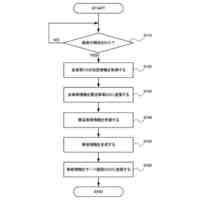
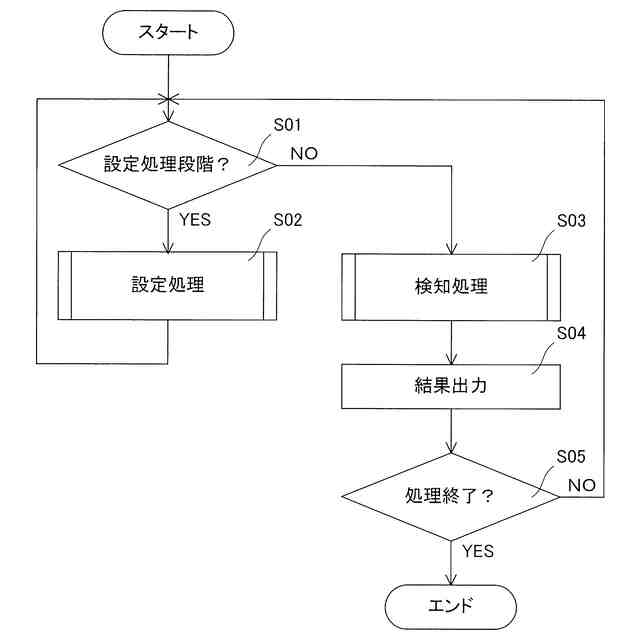
実施形態の異常走行検出装置の動作を説明するフローチャートである。
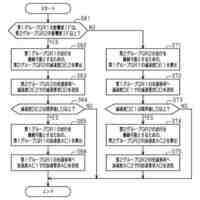
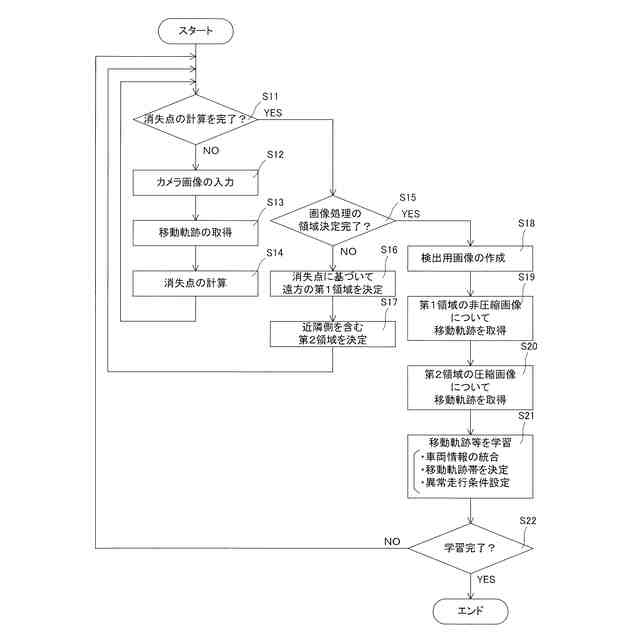
設定処理段階を具体的に説明する概念的なフローチャートである。
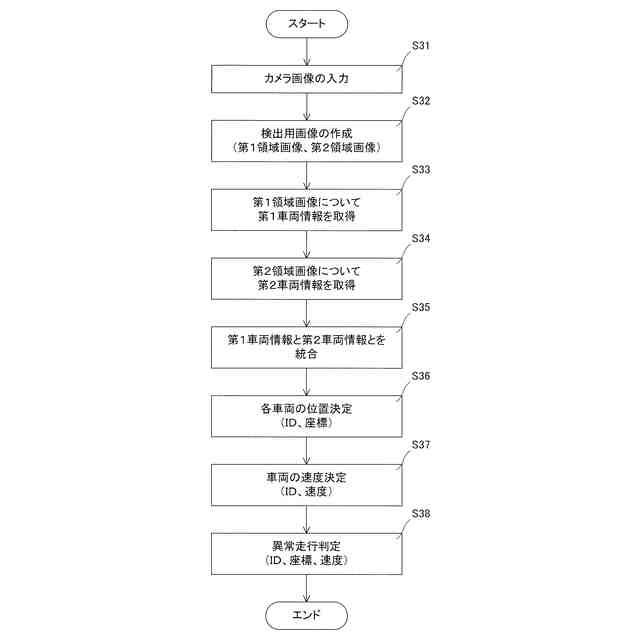
検知処理段階を具体的に説明する概念的なフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照しつつ、本発明に係る異常走行検出装置の一実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本信号株式会社
車両検知装置
2日前
日本信号株式会社
開閉システム
25日前
日本信号株式会社
制御システム
1か月前
日本信号株式会社
障害物検知装置
11日前
日本信号株式会社
障害物検知装置
11日前
日本信号株式会社
距離画像センサ
1か月前
日本信号株式会社
地上子及び地上子の製造方法
17日前
日本信号株式会社
車番式テナントチェッカ連携システム
4日前
日本信号株式会社
連動装置及び連動装置用の鎖錠解錠プログラム
25日前
日本信号株式会社
距離画像装置、距離画像の補正方法及び画像処理プログラム
1か月前
日本精機株式会社
警報システム
3か月前
個人
安全支援装置
1か月前
個人
自動電動車椅子
2か月前
株式会社SUBARU
車両
1か月前
スズキ株式会社
運転支援装置
3か月前
日本無線株式会社
船舶システム
1か月前
ニッタン株式会社
検知器
2か月前
日本信号株式会社
車両検知装置
2日前
ニッタン株式会社
検知器
3か月前
個人
磁気路上での車両の路線離脱防御
2か月前
ニッタン株式会社
検知器
2か月前
株式会社国際電気
防災システム
3か月前
ニッタン株式会社
検知器
2か月前
株式会社SUBARU
運転支援装置
2か月前
ダイハツ工業株式会社
移動支援装置
1か月前
株式会社小糸製作所
移動体検出装置
3か月前
大阪瓦斯株式会社
音声出力システム
2か月前
トヨタ自動車株式会社
サーバ
2か月前
日本信号株式会社
異常走行検出装置
2か月前
トヨタ自動車株式会社
サーバ
1か月前
株式会社小糸製作所
車両検出システム
3か月前
株式会社デンソー
運航管理装置
1か月前
日本精機株式会社
報知装置及び報知システム
2か月前
株式会社CCT
通信装置及び表示方法
2か月前
三菱自動車工業株式会社
制御システム
2か月前
株式会社SUBARU
事故情報収集装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ