TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030862
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136532
出願日
2023-08-24
発明の名称
伸縮機構
出願人
株式会社小松製作所
,
国立大学法人金沢大学
代理人
弁理士法人酒井国際特許事務所
主分類
B66F
9/24 20060101AFI20250228BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】持ち上げた荷物の前方及び側方を確認可能なカメラシステム及び作業車両を提供すること。
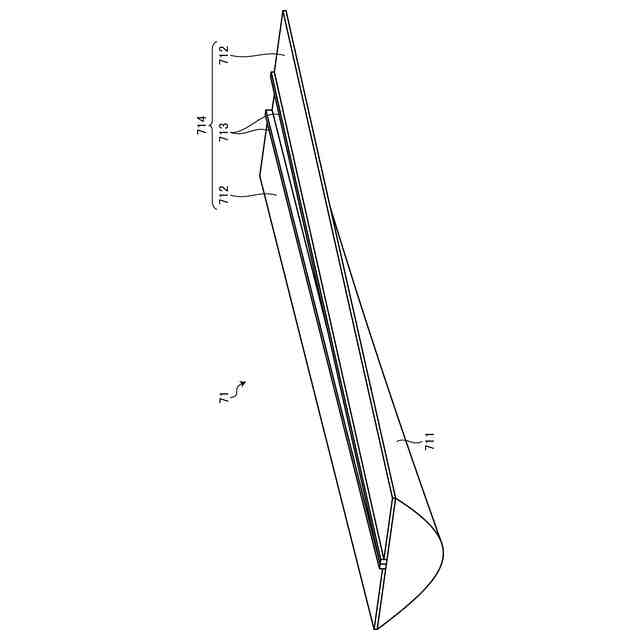
【解決手段】伸縮機構7は、可撓性を有するアーム71と、アーム71を巻き取る巻取ローラ72と、アーム71を前方へ送り出す送出ローラ73と、ファスナスライダ74と、を備え、アーム71は、アーム本体711と、ファスナスライダ74により開閉可能なファスナ714とを備え、ファスナ714の幅は、ファスナ714を閉じた状態では、アーム本体711の幅より狭く、アーム本体711は、ファスナ714を開いた状態では、平坦な板状であり、ファスナ714を閉じた状態では、幅方向に張力が作用して湾曲する。
【選択図】図17
特許請求の範囲
【請求項1】
可撓性を有するアームと、
前記アームを巻き取る巻取ローラと、
前記アームを前方へ送り出す送出ローラと、
ファスナスライダと、
を備え、
前記アームは、アーム本体と、前記ファスナスライダにより開閉可能なファスナとを備え、
前記ファスナの幅は、前記ファスナを閉じた状態では、前記アーム本体の幅より狭く、
前記アーム本体は、前記ファスナを開いた状態では、平坦な板状であり、前記ファスナを閉じた状態では、幅方向に張力が作用して湾曲する、
伸縮機構。
続きを表示(約 320 文字)
【請求項2】
前記巻取ローラは、前記ファスナが開かれて、前記アーム本体が平坦な状態の前記アームを巻き取る、
請求項1に記載の伸縮機構。
【請求項3】
前記送出ローラは、前記ファスナが閉じられて、前記アーム本体が湾曲した状態の前記アームを送り出す、
請求項1に記載の伸縮機構。
【請求項4】
前記ファスナスライダは、前記巻取ローラと前記送出ローラとの間に配置されている、
請求項1から3のいずれか一項に記載の伸縮機構。
【請求項5】
前記アームは、先端部から蛇腹部材を介してカメラが吊り下げられている、
請求項1から3のいずれか一項に記載の伸縮機構。
発明の詳細な説明
【技術分野】
【0001】
本開示は、伸縮機構に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
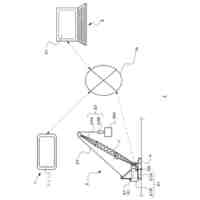
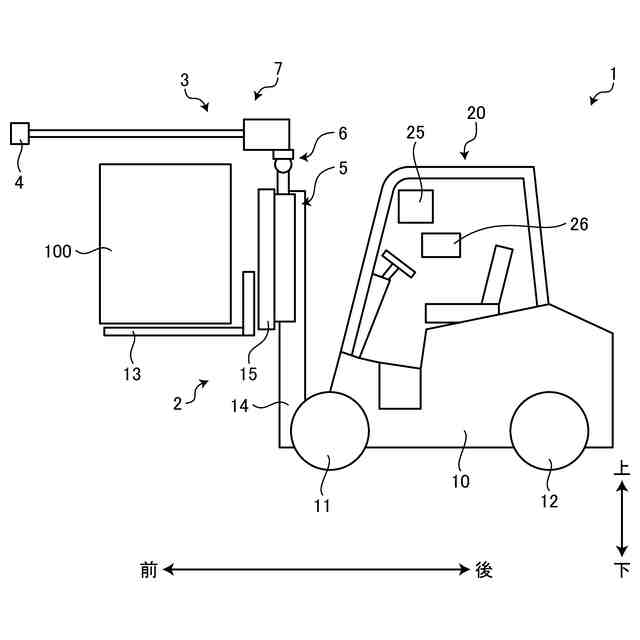
フォークリフトは荷物を持ち上げている状態では、荷物によって、運転席からの前方の視界が遮られる。そこで、作業用車両の作業部を視認するために作業用可動部に装着されたビデオカメラと、操作者が搭乗する車両本体に装着されたモニタとを備える、フォークリフトの作業部視認装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-026474号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
フォークリフトによる荷役作業時には、持ち上げた荷物の前方及び側方を確認することが望まれる。特許文献1に記載の技術では、持ち上げた荷物の前方及び側方を確認することが難しい。
【0005】
本開示の態様は、持ち上げた荷物の前方及び側方を確認可能な伸縮機構を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の態様に従えば、可撓性を有するアームと、前記アームを巻き取る巻取ローラと、前記アームを前方へ送り出す前記送出ローラと、ファスナスライダと、を備え、前記アームは、アーム本体と、前記ファスナスライダにより開閉可能なファスナとを備え、前記ファスナの幅は、前記ファスナを閉じた状態では、前記アーム本体の幅より狭く、前記アーム本体は、前記ファスナを開いた状態では、平坦な板状であり、前記ファスナを閉じた状態では、幅方向に張力が作用して湾曲する、伸縮機構が提供される。
【発明の効果】
【0007】
本開示の態様によれば、持ち上げた荷物の前方及び側方を確認可能な伸縮機構が提供される。
【図面の簡単な説明】
【0008】
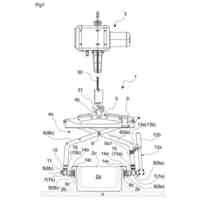
図1は、実施形態に係るフォークリフトを左側から見た概略図である。
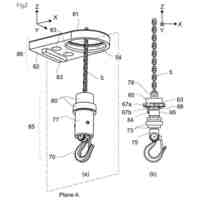
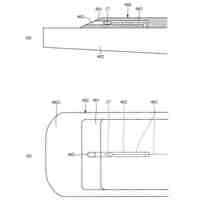
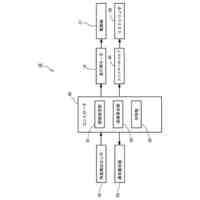
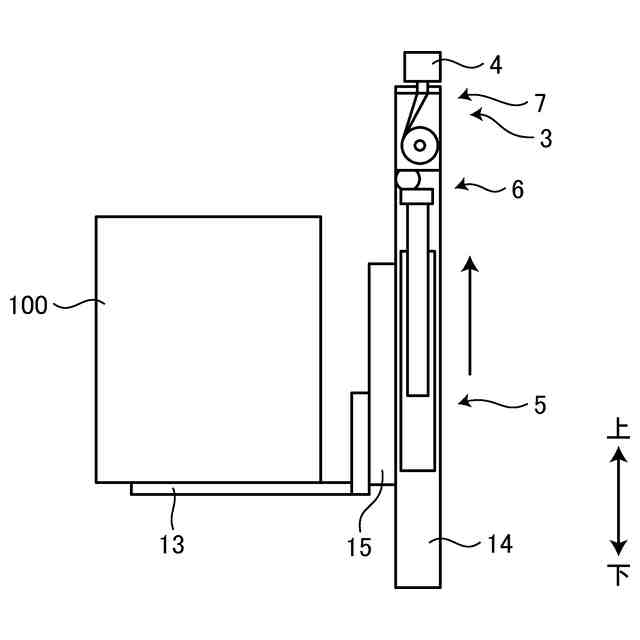
図2は、実施形態に係るカメラシステムの概略図であり、カメラシステムの収納状態を示す図である。
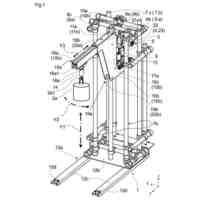
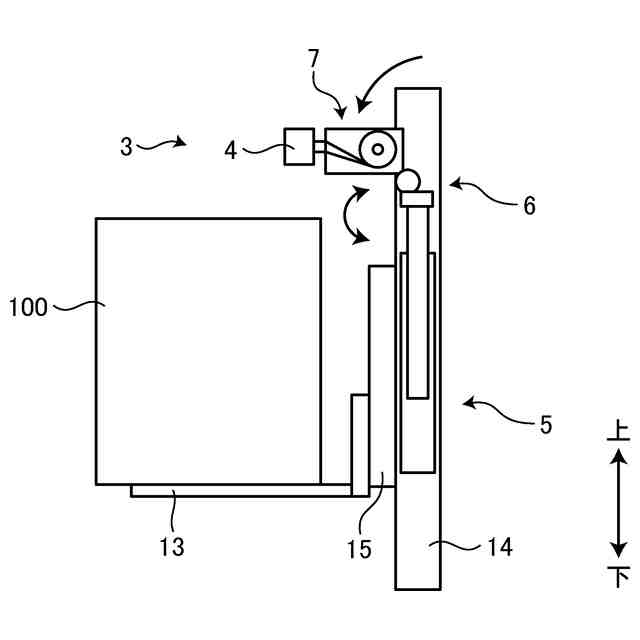
図3は、実施形態に係るカメラシステムの概略図であり、昇降機構の上昇状態を示す図である。
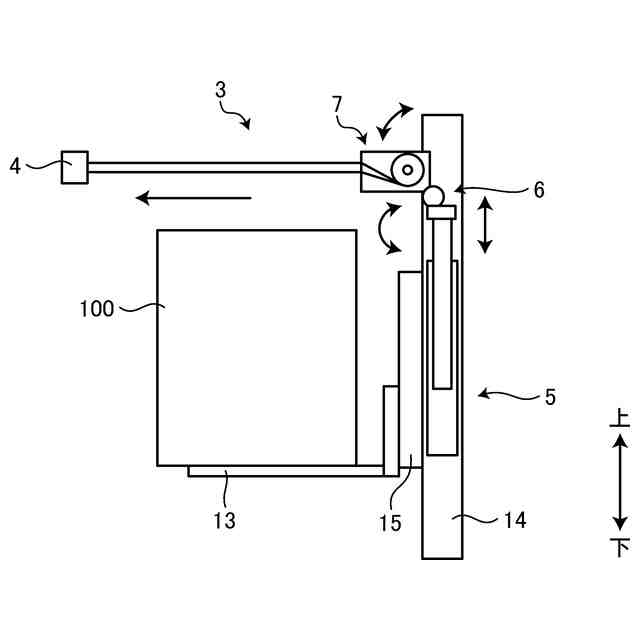
図4は、実施形態に係るカメラシステムの概略図であり、方向調節機構により上下方向の方向を変えた状態を示す図である。
図5は、実施形態に係るカメラシステムの概略図であり、伸縮機構の伸長状態を示す図である。
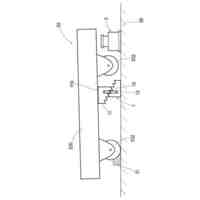
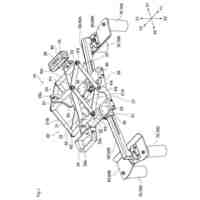
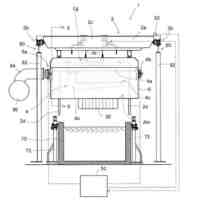
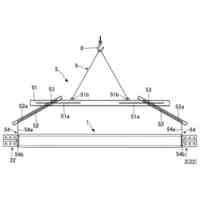
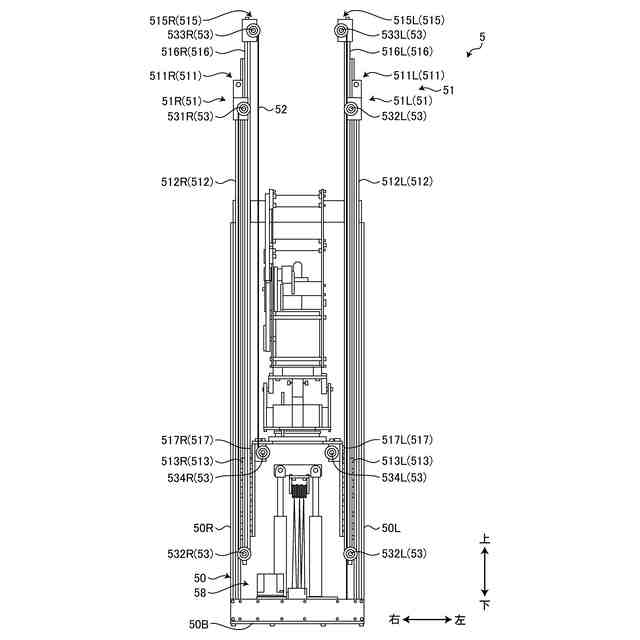
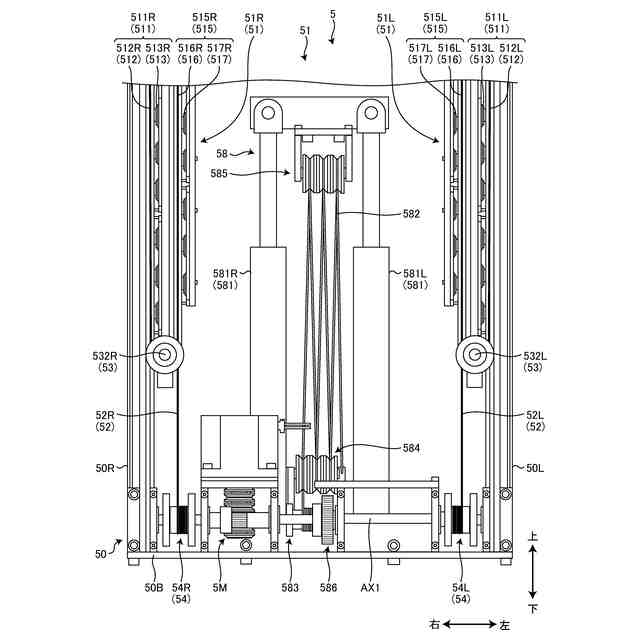
図6は、実施形態に係る昇降機構を前側から見た概略図である。
図7は、図6の部分拡大図である。
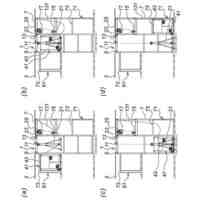
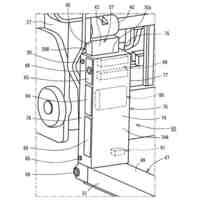
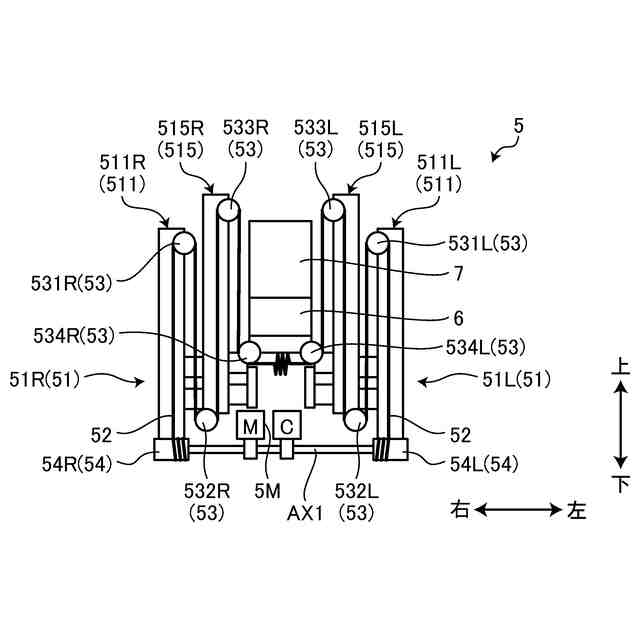
図8は、実施形態に係る昇降機構を前側から見た模式図であり、昇降機構の下降状態を示す図である。
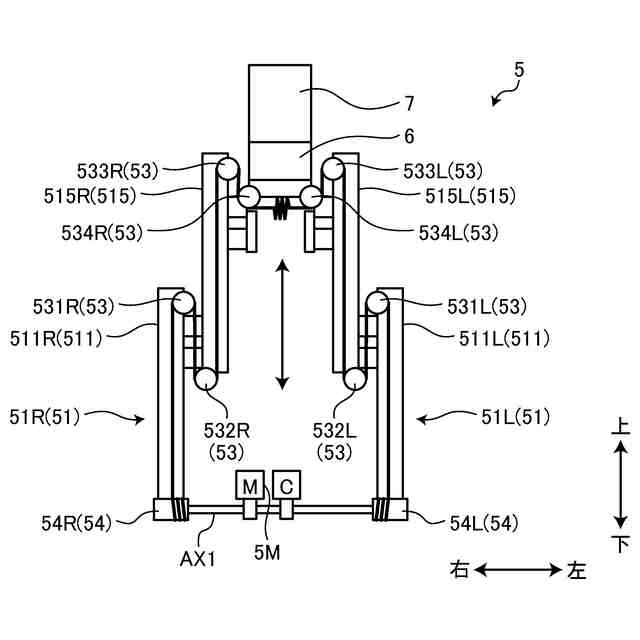
図9は、実施形態に係る昇降機構を前側から見た模式図であり、昇降機構の上昇状態を示す図である。
図10は、実施形態に係る方向調節機構の上下方向の方向調節機構の模式図である。
図11は、実施形態に係る方向調節機構の上下方向の方向調節機構の模式図であり、上下方向の方向を変えた状態を示す図である。
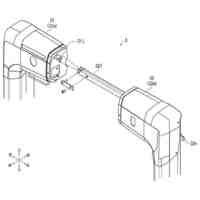
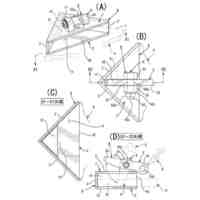
図12は、実施形態に係る方向調節機構の左右方向の方向調節機構の概略図である。
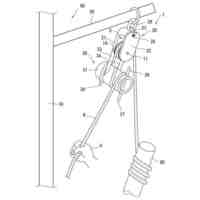
図13は、実施形態に係る方向調節機構の概略図である。
図14は、実施形態に係る伸縮機構を側面から見た模式図である。
図15は、実施形態に係る伸縮機構を斜め上側から見た模式図である。
図16は、実施形態に係る伸縮機構のスライダの模式図である。
図17は、実施形態に係る伸縮機構におけるファスナの断面変形を示す模式図である。
図18は、実施形態に係る伸縮機構においてファスナが開いた状態の断面を示す模式図である。
図19は、実施形態に係る伸縮機構においてファスナが閉じた状態の断面を示す模式図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示はこれに限定されない。以下で説明する各実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
実施形態においては、左、右、前、後、上、及び下の用語を用いて各部の位置関係について説明する。これらの用語は、フォークリフトに規定された車体座標系の原点を基準とする相対位置又は方向を示す。左右は、フォークリフトの前方に向かって右手側を右、左手側を左とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
3か月前
個人
転落防止階段
8日前
個人
小型クレーン
2日前
ユニパルス株式会社
吊具
5か月前
個人
海上コンテナ昇降装置
11か月前
ユニパルス株式会社
荷役装置
10か月前
ユニパルス株式会社
吊具装置
11か月前
株式会社いうら
車椅子用昇降機
3か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
11か月前
水戸工業株式会社
吊り具
7か月前
ユニパルス株式会社
リフト装置
5か月前
株式会社豊田自動織機
荷役車両
9か月前
ユニパルス株式会社
荷役助力装置
4か月前
岐阜工業株式会社
運搬台車
9日前
ユニパルス株式会社
荷役助力装置
6か月前
個人
エアバック式レスキュー用品
1か月前
愛知製鋼株式会社
受け架台
2か月前
株式会社伊藤
滑り止め装置
3か月前
白山工業株式会社
バランサ
7か月前
株式会社大林組
安全支援システム
2か月前
個人
垂直自動搬送機
1か月前
ユニパルス株式会社
荷役助力装置
5か月前
大栄産業株式会社
クランプ
5か月前
株式会社ユピテル
システム等
7か月前
株式会社キトー
タイヤ用吊具
6か月前
個人
アウトリガー用転倒防止ベース
1日前
新英運輸株式会社
自動車用台車
6か月前
株式会社豊田自動織機
フォークリフト
8か月前
株式会社五十鈴製作所
搬送装置
5か月前
フジテック株式会社
エレベータ
9か月前
中国計量大学
電子安全クランプ
1か月前
大和ハウス工業株式会社
吊上具
2か月前
株式会社豊田自動織機
フォークリフト
1か月前
中坪造園有限会社
吊り荷降ろし具
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ