TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135217
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024032916
出願日
2024-03-05
発明の名称
フォークリフト
出願人
株式会社豊田自動織機
代理人
主分類
B66F
9/24 20060101AFI20250910BHJP(巻上装置;揚重装置;牽引装置)
要約
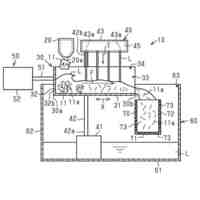
【課題】フォーク上の荷の位置を正確に把握することが可能なフォークリフトの提供にある。
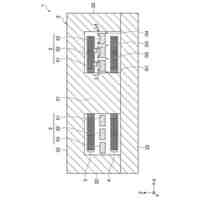
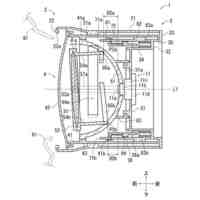
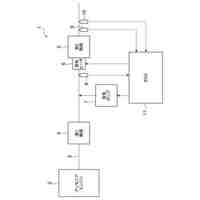
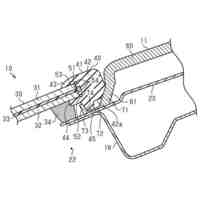
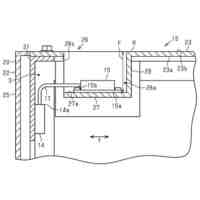
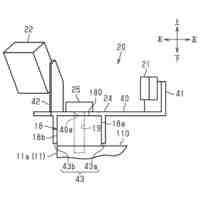
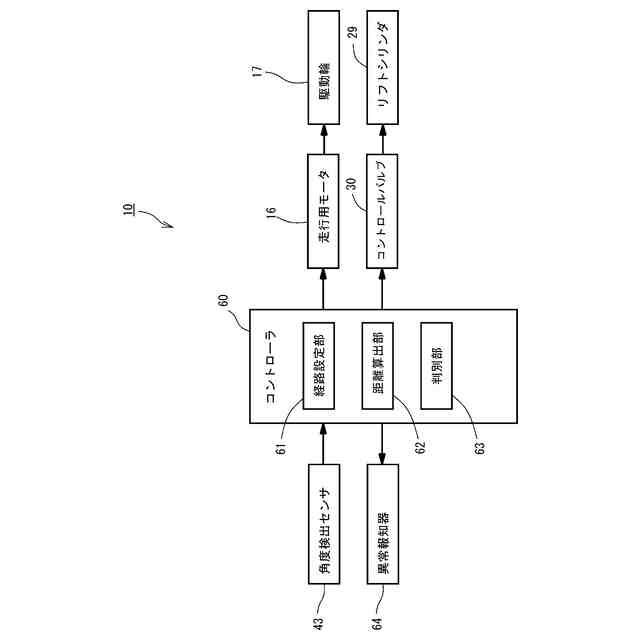
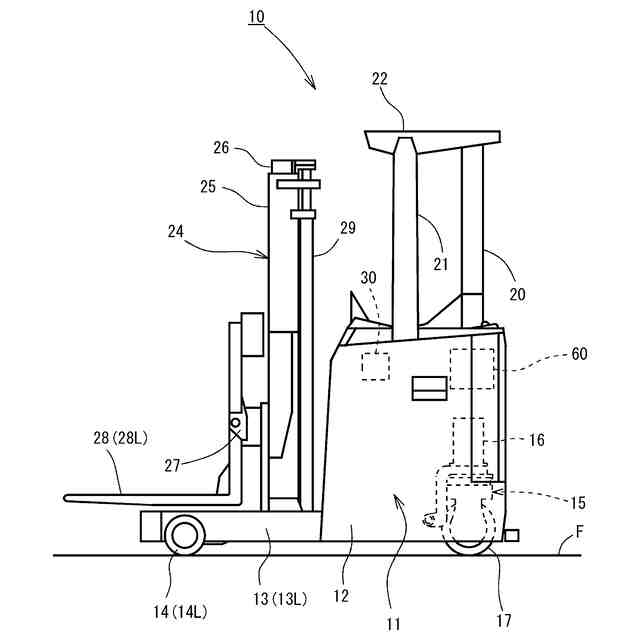
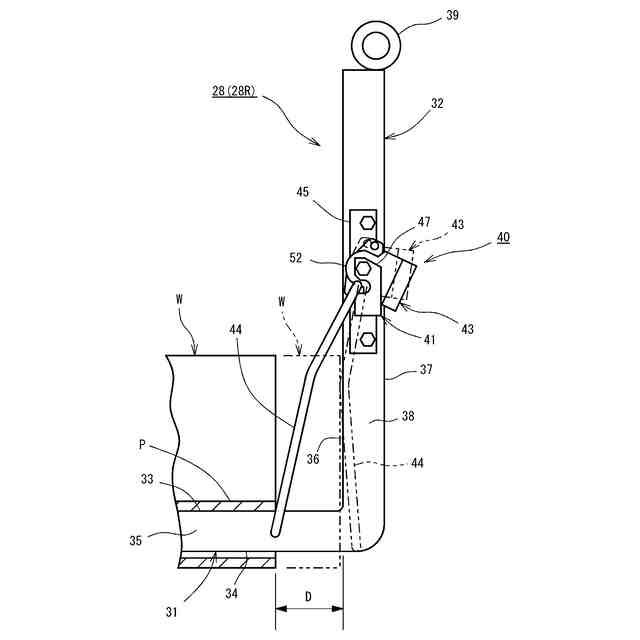
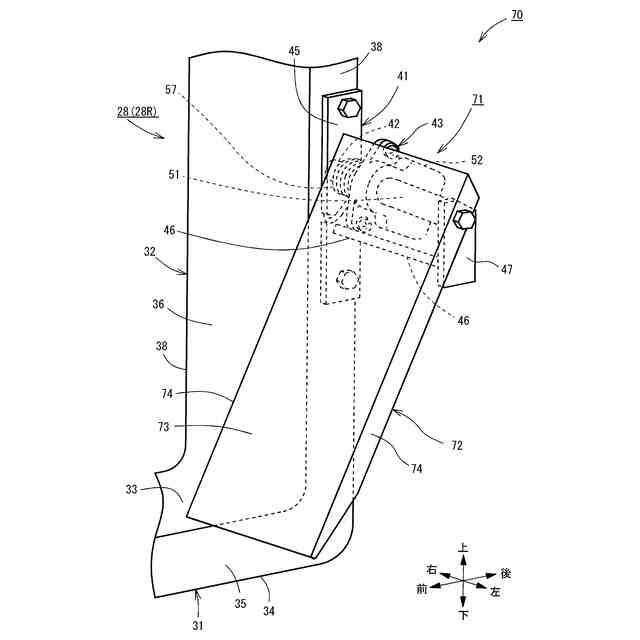
【解決手段】車体と、車体に備えられる荷役装置と、荷役装置に備えられ、荷を受承可能とする受承部および受承部の基端から上方へ延在する立設部を備えたフォークと、フォーク上の荷を検知可能な荷検出装置と、荷検出装置と接続されたコントローラ60と、を備えたフォークリフト10である。荷検出装置は、フォークに軸支された軸部材と、フォーク上の荷と接触可能かつ軸部材を支点として揺動可能なアーム部材と、アーム部材の回動角度を検出可能な角度検出センサ43と、を有する。コントローラ60は、荷とアーム部材との接触によりアーム部材が回動するとき、角度検出センサ43が検出する回動角度に基づいて受承部における受承部の長手方向における荷と立設部との距離を算出する距離算出部62を有した。
【選択図】 図5
特許請求の範囲
【請求項1】
車体と、
前記車体に備えられる荷役装置と、
前記荷役装置に備えられ、荷を受承可能とする受承部および前記受承部の基端から上方へ延在する立設部を備えたフォークと、
前記フォーク上の荷を検知可能な荷検出装置と、
前記荷検出装置と接続されたコントローラと、を備えたフォークリフトにおいて、
前記荷検出装置は、
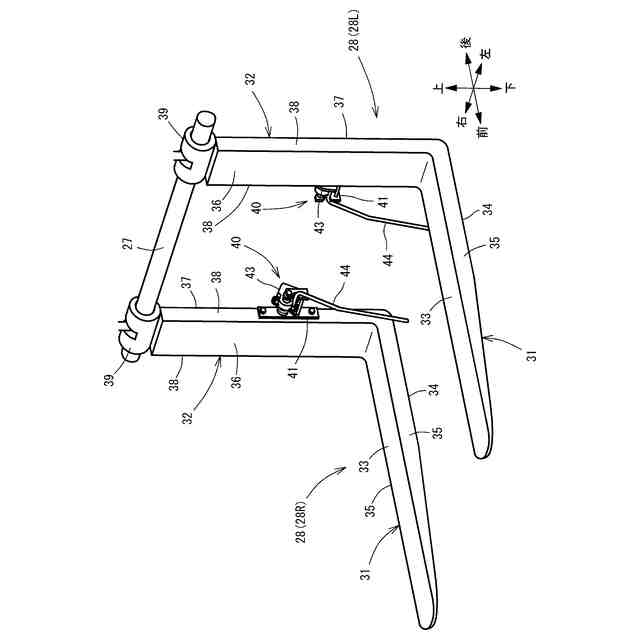
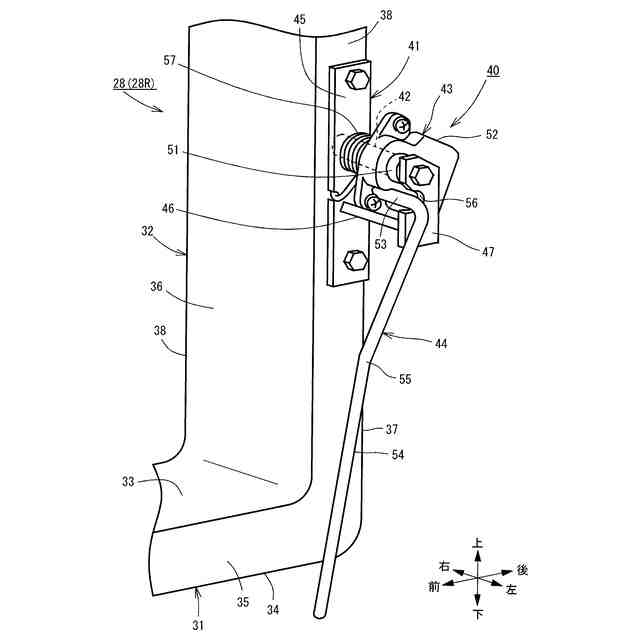
前記フォークに軸支された軸部材と、
前記フォーク上の荷と接触可能かつ前記軸部材を支点として揺動可能なアーム部材と、
前記アーム部材の回動角度を検出可能な角度検出センサと、を有し、
前記コントローラは、荷と前記アーム部材との接触により前記アーム部材が回動するとき、前記角度検出センサが検出する回動角度に基づいて前記受承部における前記受承部の長手方向における荷と前記立設部との距離を算出する距離算出部を有することを特徴とするフォークリフト。
続きを表示(約 580 文字)
【請求項2】
前記角度検出センサは、連続的又は段階的に前記アーム部材の回動角度を検出することを特徴とする請求項1記載のフォークリフト。
【請求項3】
荷の状態が異常であることを示す第1異常報知器を有し、
前記コントローラは、荷が前記受承部の先端へ向けて移動するとき、前記異常報知器を作動させることを特徴とする請求項1又は2記載のフォークリフト。
【請求項4】
荷の状態が異常であることを示す第2異常報知器を有し、
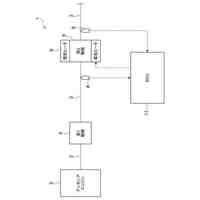
前記角度検出センサは、一対の前記フォークにそれぞれ備えられ、
前記コントローラは、一方の前記角度検出センサが検出する回動角度と、他方の前記角度検出センサが検出する回動角度との差が閾値以上のとき、前記第2異常報知器を作動させることを特徴とする請求項1又は2記載のフォークリフト。
【請求項5】
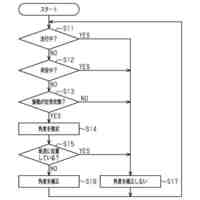
前記コントローラは、目的地に適した走行経路を予め設定する経路設定部を有し、
前記異常報知器の作動時に、荷の位置に基づいて前記走行経路を再設定するか、もしくは、前記フォークによる荷取り動作をやり直すように前記荷役装置を制御することを特徴とする請求項4記載のフォークリフト。
【請求項6】
自動運転による無人走行が可能であることを特徴とするフォークリフト。
発明の詳細な説明
【技術分野】
【0001】
この発明は、フォークリフトに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
フォークリフトの従来技術として、例えば、特許文献1に開示されたフォークリフトの荷位置検出装置が知られている。特許文献1に開示されたフォークリフトの荷位置検出装置は、フォークリフトが備える荷位置検出装置であって、フォークに回転可能に取り付けられたレバーと、ワークからの押圧によるレバーの回転に伴って回転するカムと、カムの回転角度に応じて制御されるスイッチと、スイッチの状態に基づいて上記フォーク上でのワークの位置を検出する検出手段、を備える。スイッチは、カムの回転角度が第1の閾値以下であれば第1の状態を保持し、カムの回転角度が第1の閾値から第2の閾値の間であれば第2の状態を保持し、カムの回転角度が第2の閾値以上であれば第1の状態を保持し、検出手段は、スイッチが第1の状態から第2の状態に遷った後に第1の状態に戻ったときに、荷位置の異常を検出する。
【0003】
特許文献1に開示されたフォークリフトの荷位置検出装置によれば、ワークがフォーク上の適切な位置に配置されると、カムの回転角度が第1の閾値から第2の閾値の間の値となり、スイッチは第1の状態から第2の状態にうつる。また、ワークが機台に近づき過ぎると、カムの回転角度が第2の閾値よりも大きくなり、スイッチは第2の状態から第1の状態にうつる。これにより、検出手段は、1つのスイッチの出力をモニタすることにより、ワークがフォーク上の適切な位置に配置されたこと、及びワークが機台に近づき過ぎたことの双方を検出する。特許文献1に開示されたフォークリフトの荷位置検出装置は、ワークがフォークリフトの機台等に接触することを回避する機能を簡単な構成で提供する点で優れている。
【先行技術文献】
【特許文献】
【0004】
特開2006-193255号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のフォークリフトの荷位置検出装置は、リミットスイッチのON・OFFを用いてフォーク上の荷の異常の有無を検知するに過ぎない。ところで、近年では、フォークにより荷取りされた荷の位置をより正確に把握することが要請されている。特に、フォークリフトの自動運転による無人走行化を進める上では、フォーク上の荷の位置をリアルタイムで正確に把握することが強く望まれている。
【0006】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、フォーク上の荷の位置を正確に把握することが可能なフォークリフトの提供にある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、車体と、前記車体に備えられる荷役装置と、前記荷役装置に備えられ、荷を受承可能とする受承部および前記受承部の基端から上方へ延在する立設部を備えたフォークと、前記フォーク上の荷を検知可能な荷検出装置と、前記荷検出装置と接続されたコントローラと、を備えたフォークリフトにおいて、前記荷検出装置は、前記フォークに軸支された軸部材と、前記フォーク上の荷と接触可能かつ前記軸部材を支点として揺動可能なアーム部材と、前記アーム部材の回動角度を検出可能な角度検出センサと、を有し、前記コントローラは、荷と前記アーム部材との接触により前記アーム部材が回動するとき、前記角度検出センサが検出する回動角度に基づいて前記受承部における前記受承部の長手方向における荷と前記立設部との距離を算出する距離算出部を有することを特徴とする。
【0008】
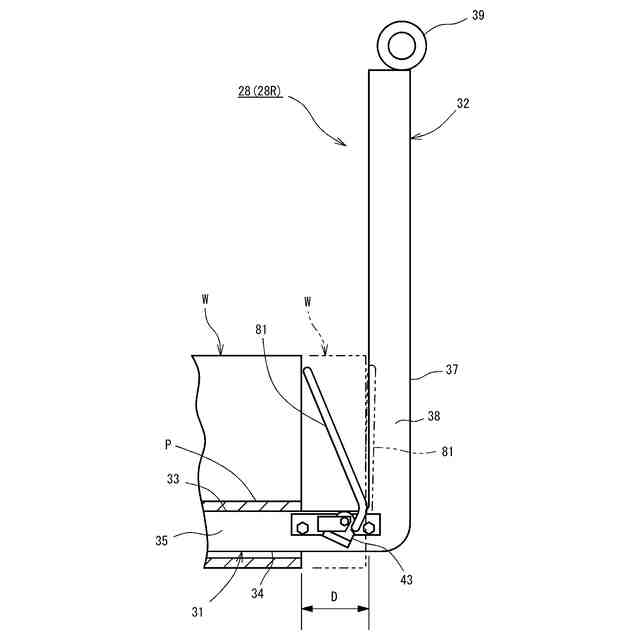
本発明では、フォーク上の荷がアーム部材と接触すると、アーム部材は、揺動による変位によって回動する。アーム部材が回動すると、角度検出センサによりアーム部材の回動角度が検出される。コントローラが有する距離算出部は、角度検出センサが検出する回動角度に基づいて受承部における荷と立設部との距離を算出する。したがって、コントローラは、フォーク上の荷の位置を正確に把握することが可能となる。
【0009】
また、上記のフォークリフトにおいて、前記角度検出センサは、連続的又は段階的に前記アーム部材の回動角度を検出する構成としてもよい。
この場合、角度検出センサは、連続的又は段階的にアーム部材の回動角度を検出するので、コントローラは、フォーク上の荷の位置を連続的又は段階的に把握することが可能となる。
【0010】
また、上記のフォークリフトにおいて、荷の状態が異常であることを示す第1異常報知器を有し、前記コントローラは、荷が前記受承部の先端へ向けて移動するとき、前記異常報知器を作動させる構成としてもよい。
この場合、走行時又は荷役時において、荷が受承部の先端へ向けて移動すると、角度検出センサにより検出される回動角度は小さくなる。このため、コントローラは、荷が受承部の先端へ向けて移動するとき、第1異常報知器を作動させる。その結果、フォークに対する荷の位置の異常を検知することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
解繊機
3日前
株式会社豊田自動織機
蓄電装置
18日前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
トランス
19日前
株式会社豊田自動織機
電源装置
19日前
株式会社豊田自動織機
荷役装置
1か月前
株式会社豊田自動織機
産業車両
5日前
株式会社豊田自動織機
制御装置
18日前
株式会社豊田自動織機
内燃機関
18日前
株式会社豊田自動織機
操作装置
1か月前
株式会社豊田自動織機
トランス
1か月前
株式会社豊田自動織機
電力変換器
1か月前
株式会社豊田自動織機
車両用灯具
5日前
株式会社豊田自動織機
双方向充電器
1か月前
株式会社豊田自動織機
車両制御装置
1か月前
株式会社豊田自動織機
排気浄化装置
1か月前
株式会社豊田自動織機
双方向充電器
1か月前
株式会社豊田自動織機
車両上部構造
5日前
株式会社豊田自動織機
排気浄化装置
4日前
株式会社豊田自動織機
障害物検出装置
3日前
株式会社豊田自動織機
燃料電池ユニット
1か月前
株式会社豊田自動織機
ターボチャージャ
1か月前
株式会社豊田自動織機
電磁ブレーキ装置
1か月前
株式会社豊田自動織機
ターボチャージャ
26日前
株式会社豊田自動織機
電力供給システム
1か月前
株式会社豊田自動織機
燃料電池システム
12日前
株式会社豊田自動織機
織機用異常検知装置
1か月前
株式会社豊田自動織機
スクロール型圧縮機
1か月前
株式会社豊田自動織機
内燃機関の制御装置
1か月前
株式会社豊田自動織機
ディーゼルエンジン
10日前
株式会社豊田自動織機
ねじりコイルばね装置
1か月前
株式会社豊田自動織機
インバータ一体型電動機
1か月前
株式会社豊田自動織機
繊維機械の検査システム
1か月前
株式会社豊田自動織機
内燃機関の制御システム
1か月前
株式会社豊田自動織機
車両のルーフサイド構造
1か月前
トヨタ自動車株式会社
蓄電池
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ