TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038650
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145390
出願日
2023-09-07
発明の名称
ハンド
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20250312BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークの引き込みのための制御を容易化する。
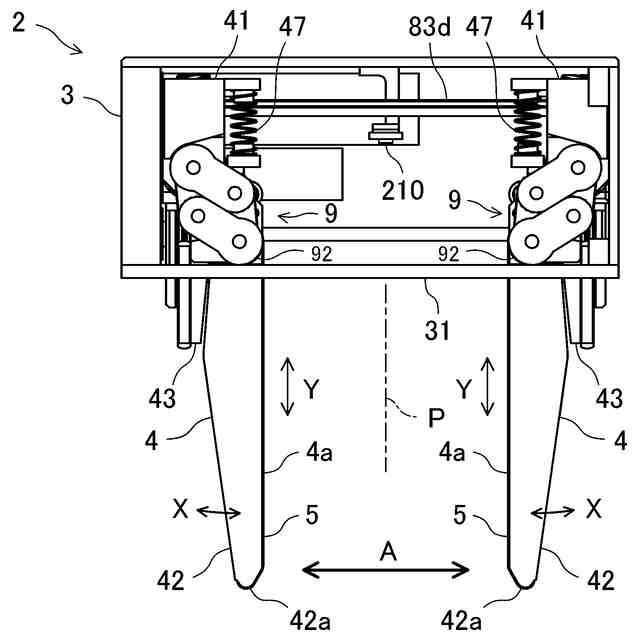
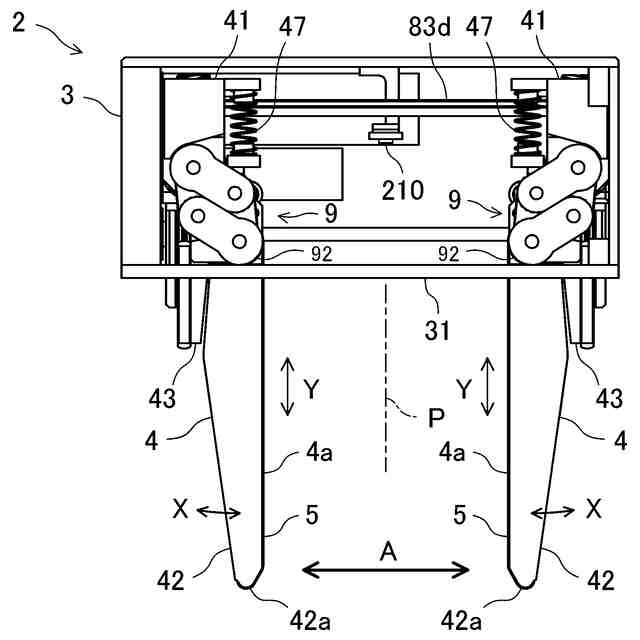
【解決手段】ハンド2は、ハンド本体3と、前記ハンド本体3に設けられ、開閉動作する複数の指4とを備えている。複数の指4の各指4は、指4の少なくとも先端に巻き掛けられ、回転駆動され、ワークWと接触する無端ベルト5を有する。指4は、複数の指4が開閉する第1方向Xへ弾性的に変位可能であり、且つ、ハンド本体3に対して進退する第2方向Yへ弾性的に変位可能である。
【選択図】図2
特許請求の範囲
【請求項1】
ハンド本体と、
前記ハンド本体に設けられ、開閉動作する複数の指とを備え、
前記複数の指の各指は、前記指の少なくとも先端に巻き掛けられ、回転駆動され、ワークと接触する無端ベルトを有し、
前記指は、前記複数の指が開閉する第1方向へ弾性的に変位可能であり、且つ、前記ハンド本体に対して進退する第2方向へ弾性的に変位可能であるハンド。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のハンドにおいて、
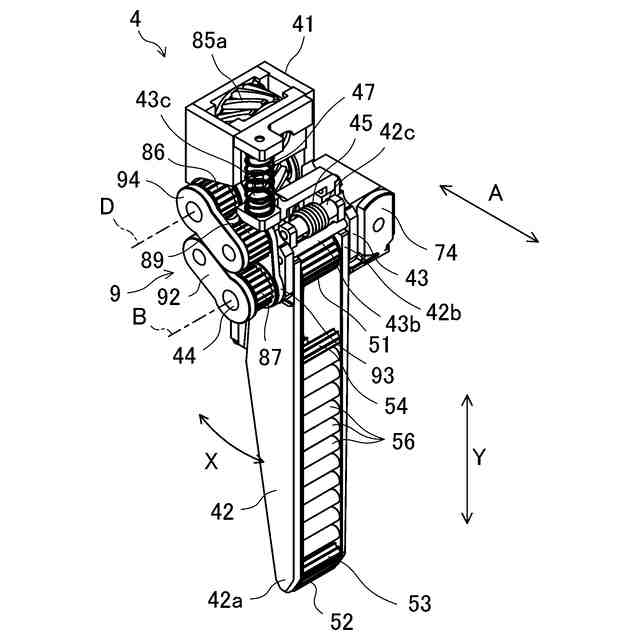
前記指は、前記ハンド本体に支持されるベースと、前記第1方向へ弾性的に変位可能に前記ベースに対して支持されると共に、前記第2方向へ弾性的に変位可能に前記ベースに対して支持される指本体とを有し、
前記無端ベルトは、前記指本体に配置されているハンド。
【請求項3】
請求項2に記載のハンドにおいて、
前記無端ベルトのための回転駆動力を伝達する伝達器をさらに備え、
前記指本体は、前記無端ベルトが巻き掛けられる第1プーリ及び第2プーリを有し、
前記伝達器は、前記回転駆動力を前記第1プーリに伝達するハンド。
【請求項4】
請求項3に記載のハンドにおいて、
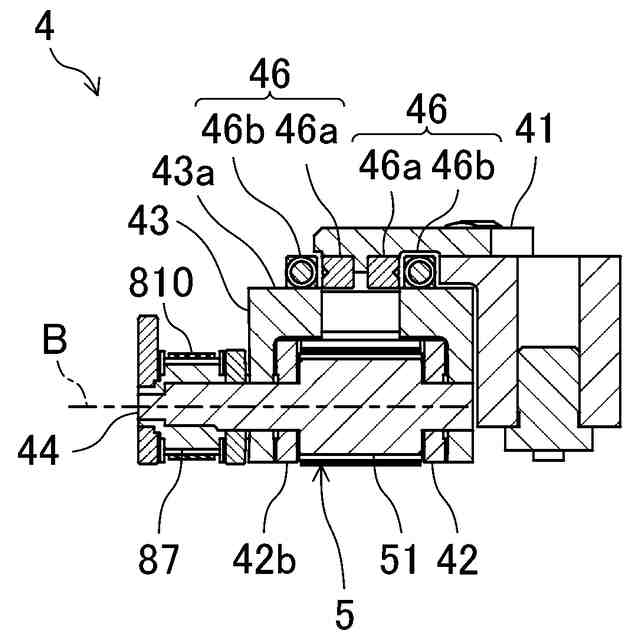
前記伝達器は、
前記ベースに設けられた第1伝達プーリと、
前記指本体に設けられた第2伝達プーリと、
前記第1伝達プーリ及び前記第2伝達プーリに巻き掛けられる伝動ベルトと、
前記伝動ベルトに張力を付与する第1アイドルプーリと、
前記伝動ベルトに張力を付与する第2アイドルプーリと、
前記ベース及び前記指本体のそれぞれに連結され且つ、前記第1アイドルプーリ及び前記第2アイドルプーリを支持するリンク機構とを有するハンド。
【請求項5】
請求項4に記載のハンドにおいて、
前記リンク機構は、
前記第1アイドルプーリを回転可能に支持し且つ、前記第1伝達プーリの軸心回りに回転可能に前記ベースに連結された第1リンクと、
前記第1アイドルプーリを回転可能に支持し且つ、前記第2伝達プーリの軸心回りに回転可能に前記指本体に連結された第2リンクと、
前記第2アイドルプーリを回転可能に支持し且つ、前記第2伝達プーリの軸心回りに回転可能に前記指本体に連結された第3リンクと、
前記第2アイドルプーリを回転可能に支持し且つ、前記第1伝達プーリの軸心回りに回転可能に前記ベースに連結された第4リンクとを含み、
前記第1伝達プーリ、前記第2伝達プーリ、前記第1アイドルプーリ及び前記第2アイドルプーリのそれぞれのピッチ円の径は、互いに同じであるハンド。
【請求項6】
請求項4に記載のハンドにおいて、
前記リンク機構は、
前記第1アイドルプーリを回転可能に支持し且つ、前記第1伝達プーリの軸心回りに回転可能に前記ベースに連結された第1リンクと、
前記第1アイドルプーリを回転可能に支持し且つ、前記第2伝達プーリの軸心回りに回転可能に前記指本体に連結された第2リンクと、
前記第2アイドルプーリを回転可能に支持し且つ、前記第2伝達プーリの軸心回りに回転可能に前記指本体に連結された第3リンクと、
前記第2アイドルプーリを回転可能に支持し且つ、前記第1伝達プーリの軸心回りに回転可能に前記ベースに連結された第4リンクとを含み、
前記第1リンク、前記第2リンク、前記第3リンク及び前記第4リンクの長さは、互いに等しいハンド。
【請求項7】
請求項3に記載のハンドにおいて、
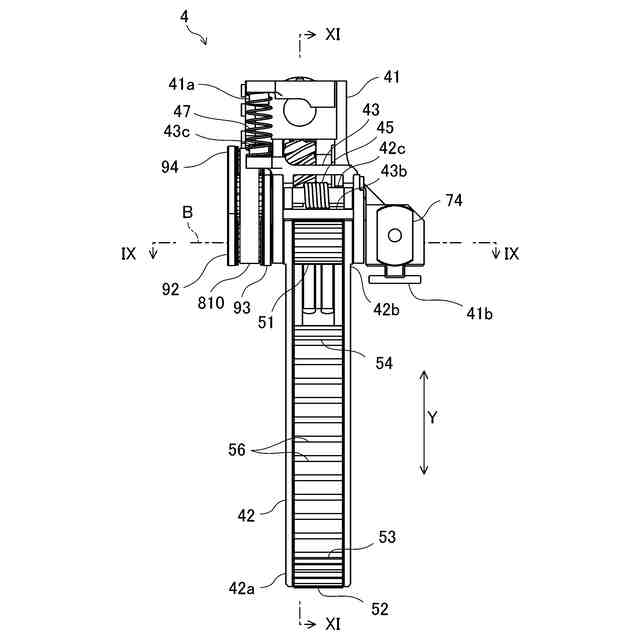
前記指本体は、前記第1プーリの軸心回りに揺動可能に前記ベースに支持され、前記第1プーリの軸心回りに揺動することによって前記第1方向へ変位するハンド。
【請求項8】
請求項7に記載のハンドにおいて、
前記指本体を前記第1方向において前記指の閉じる側に付勢するねじりバネをさらに備え、
前記ねじりバネの軸心は、前記第1プーリの軸心から偏心した位置に位置するハンド。
【請求項9】
請求項1に記載のハンドにおいて、
前記指は、回転駆動される第1プーリと、前記指の先端に配置された第2プーリと、前記第1プーリと前記第2プーリとの間に配置された第3プーリとを含み、
前記無端ベルトは、前記第1プーリ、前記第2プーリ及び前記第3プーリに巻き掛けられ、
前記複数の指の前記第3プーリ同士の間隔は、前記複数の指の前記第1プーリ同士の間隔よりも狭いハンド。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ハンドに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来より、回転駆動されるベルトを有する指を備えたハンドが知られている。例えば、特許文献1に記載のハンドは、2本の指を有している。各指は、回転駆動されるベルトを有する。このハンドは、ベルトを回転駆動することによって、2本の指の間にワークを引き込んでいる。
【先行技術文献】
【特許文献】
【0003】
特開2014-24143号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ワークをベルトによって複数の指の間に引き込む場合には、ワークが複数の指の先端の間に適切に嵌ることによってワークの引き込みが実現される。ワークに対する複数の指の先端の位置精度が低いと、ワークを複数の指の間に引き込むことができない虞がある。さらに、複数の指の間隔がワークに対して適切に設定されていないと、ワークを複数の指の間に引き込むことができない虞がある。複数の指の位置及び間隔の精度を向上させることによって、ワークの適切な引き込みが実現され得る。しかしながら、複数の指の位置及び間隔の精度を上げると、制御の難易度が上がると共に制御動作が低速化してしまう。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ワークの引き込みのための制御を容易化できるハンドを提供することにある。
【課題を解決するための手段】
【0006】
本開示のハンドは、ハンド本体と、前記ハンド本体に設けられ、開閉動作する複数の指とを備え、前記複数の指の各指は、前記指の少なくとも先端に巻き掛けられ、回転駆動され、ワークと接触する無端ベルトを有し、前記指は、前記複数の指が開閉する第1方向へ弾性的に変位可能であり、且つ、前記ハンド本体に対して進退する第2方向へ弾性的に変位可能である。
【発明の効果】
【0007】
前記ハンドによれば、ワークの引き込みのための制御を容易化できる。
【図面の簡単な説明】
【0008】
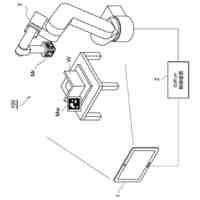
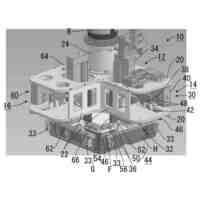
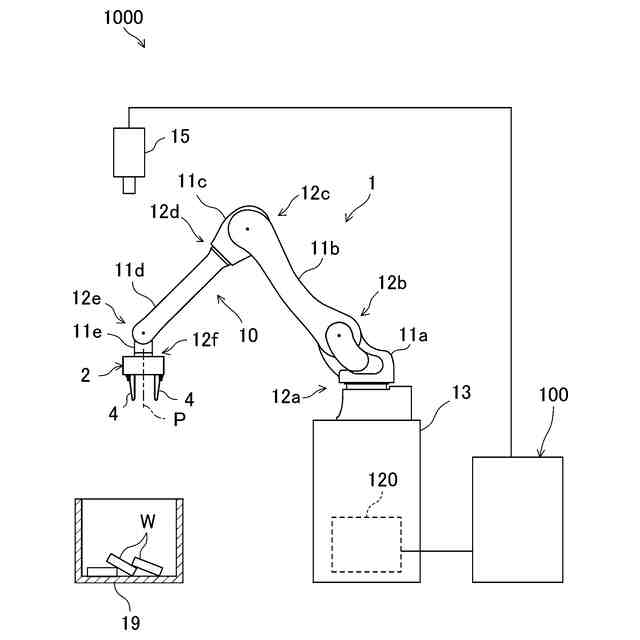
図1は、ロボットシステムの構成を示す模式図である。
図2は、ハンドの正面図である。
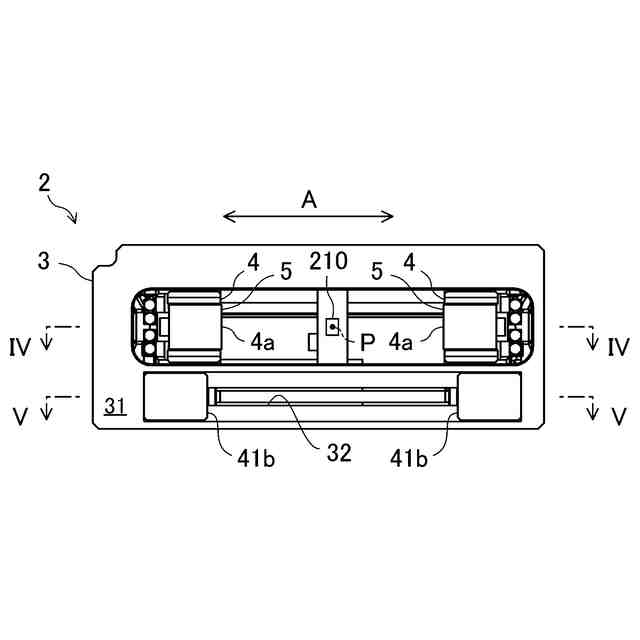
図3は、ハンドの底面図である。
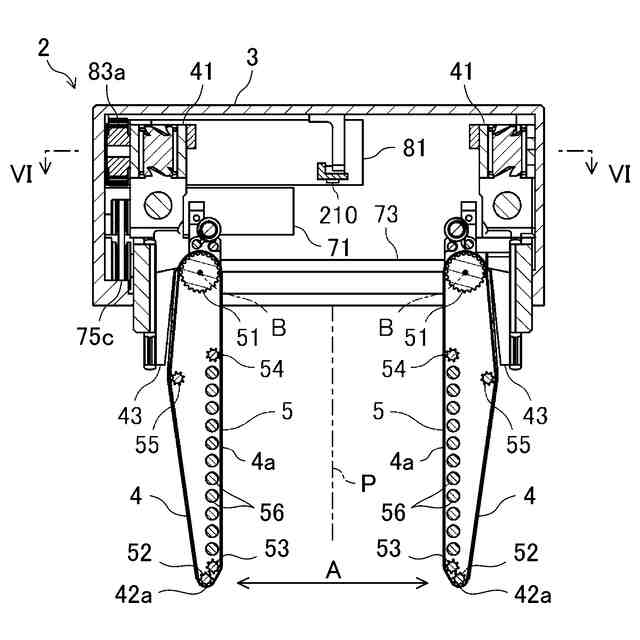
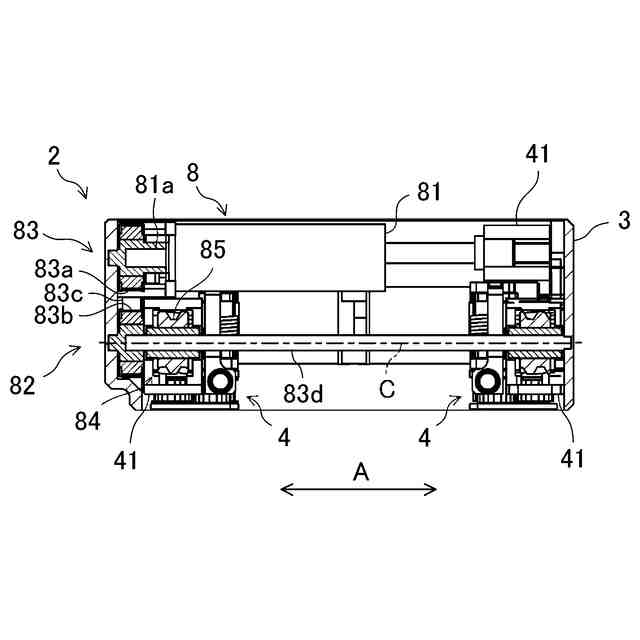
図4は、図3のIV-IV線におけるハンドの断面図である。
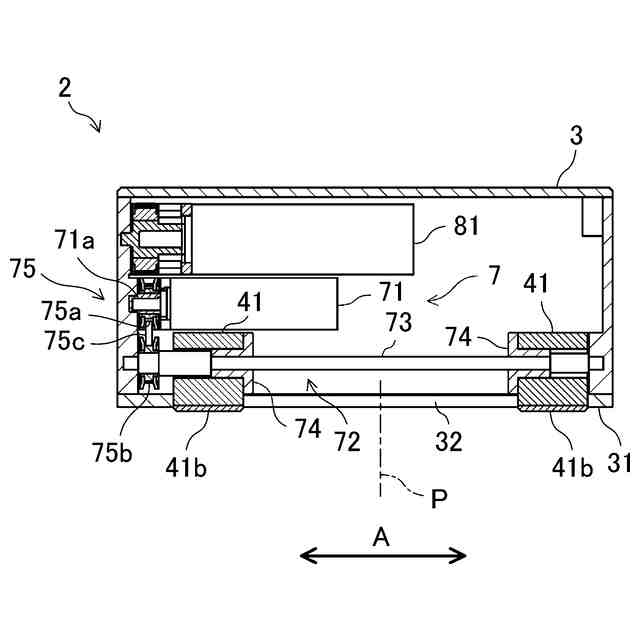
図5は、図3のV-V線におけるハンドの断面図である。
図6は、図4のVI-VI線におけるハンドの断面図である。
図7は、指の斜視図である。
図8は、指の側面図である。
図9は、図8のIX-IX線における指の断面図である。
図10は、指本体及び支持器の正面図である。
図11は、図8のXI-XI線における指の断面図である。
図12は、図7と異なる角度からの指の斜視図である。
図13は、指の正面図である。
図14は、指本体が第2方向の後退側へ変位した状態の指の正面図である。
図15は、制御装置の概略的なハードウェア構成を示す図である。
図16は、処理器の制御系統の構成を示すブロック図である。
図17は、ピックアンドプレース処理のフローチャートである。
図18は、ハンドのサーチ動作の一例を説明するための模式図である。
図19は、ワークの引き込みが成功した場合の模式図である。
図20は、ワークの引き込み時の指の状態を説明する模式図である。
図21は、ハンドのサーチ動作の別の例を説明するための模式図である。
図22は、ハンドのサーチ動作の別の例を説明するための模式図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、ロボットシステム1000の構成を示す模式図である。本開示において、平行、直交、同じ、一致、同時又は中央は、厳密な平行、直交、同じ、一致、同時又は中央だけでなく、実質的な平行、直交、同じ、一致、同時又は中央も含む。
【0010】
ロボットシステム1000は、ハンド2と、ハンド2が連結されたロボットアーム10と、ハンド2及びロボットアーム10を制御する制御装置100とを備えている。ハンド2及びロボットアーム10は、ロボット1に含まれている。すなわち、ロボットシステム1000は、ハンド2及びロボットアーム10を含むロボット1を備えている。ロボットシステム1000は、ハンド2によってワークWをピッキングする。この例では、ロボットシステム1000は、コンテナ19内にバラ積みされた複数のワークWの中から一のワークWをピッキングする。ただし、ロボットシステム1000は、単独で配置された特定の一のワークWをピッキングしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
水素航空機
2日前
川崎重工業株式会社
搬送システム、搬送物の搬送方法、および、ロボット
3日前
川崎重工業株式会社
ロボットシステム、ロボット動作方法、および、ロボット
3日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
24日前
株式会社不二越
ロボット
16日前
株式会社エビス
腰ベルト用連結具
1か月前
川崎重工業株式会社
制動システム
16日前
住友重機械工業株式会社
ロボット
10日前
株式会社アイエイアイ
グリッパー
5日前
株式会社イノウ
給油口キャップ用開閉具
17日前
庄内機械株式会社
釘打装置
3日前
株式会社不二越
垂直多関節ロボット
17日前
芝浦機械株式会社
双腕ロボット
9日前
アイホン株式会社
ネジ締めカウントシステム
18日前
トヨタ自動車東日本株式会社
搬送治具
3日前
トヨタ自動車株式会社
荷姿影響緩和方法
6日前
パナソニック株式会社
工具
17日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
17日前
住友重機械工業株式会社
ロボット及びカバー
10日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社マキタ
電動工具
3日前
株式会社ダイヘン
端末装置
3日前
住友重機械工業株式会社
アクチュエータ支持部材
9日前
株式会社マキタ
打ち込み工具
18日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
10日前
株式会社マキタ
打ち込み工具
3日前
株式会社マキタ
打ち込み工具
3日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
SB C&S株式会社
治具セット
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
株式会社関電工
目盛り付きペンチ及びテンションメンバ固定方法
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ