TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025034944
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141638
出願日
2023-08-31
発明の名称
搬送装置
出願人
株式会社アイセイ
代理人
個人
主分類
B25J
9/10 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】搬送対象物を目標位置に搬送する作業効率を良くすることができる搬送装置を提供すること。
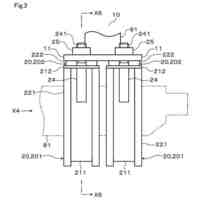
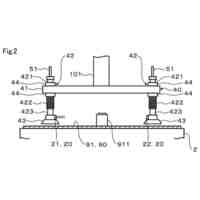
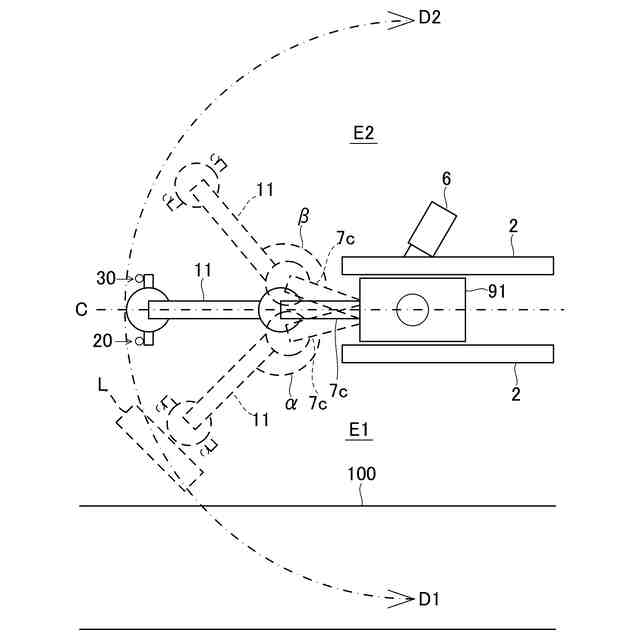
【解決手段】搬送対象物Lを搬送するための搬送部90と、搬送部90に備えられた第1のアーム7を昇降させるための電動モータ6と、第1の操作レバー20および第2の操作レバー30と、操作レバーの変位量に対応する操作信号を出力する操作レバー用ロードセル24と、操作レバー用ロードセル24から出力される操作信号に基づいて電動モータ6を制御する制御部とを備えており、制御部は、電動モータ6が第1の回転速度にて駆動されているときに、搬送対象物Lが目標位置から離れた所定の位置に到達したと判断したときは、電動モータ6の回転速度を第1の回転速度よりも遅い第2の回転速度に減速するように電動モータ6を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
搬送対象物を搬送するための搬送部と、
前記搬送部を駆動するための電動モータと、
操作部と、
前記操作部が操作されたことを示す操作信号を出力する操作信号出力部と、
前記操作信号出力部から出力される前記操作信号に基づいて前記電動モータを制御する制御部と、を備えた搬送装置であって、
前記制御部は、
前記電動モータが第1の回転速度にて駆動されているときに、前記搬送対象物が目標位置から離れた所定の位置に到達したと判断したときは、前記電動モータの回転速度を前記第1の回転速度よりも遅い第2の回転速度に減速するように前記電動モータを制御することを特徴とする搬送装置。
続きを表示(約 1,900 文字)
【請求項2】
搬送対象物を搬送するための搬送部と、
前記搬送部を駆動するための電動モータと、
操作部と、
前記操作部の変位量に対応する操作信号を出力する操作信号出力部と、
前記操作信号出力部から出力される前記操作信号に基づいて前記電動モータを制御する制御部と、を備えた搬送装置であって、
前記制御部は、
前記操作信号出力部から出力される前記操作信号に基づいて前記電動モータの回転速度を制御し、かつ、前記搬送対象物が目標位置から離れた所定の位置に到達したと判断したときは、前記操作部の変位量に対する前記電動モータの応答性を低下させることを特徴とする搬送装置。
【請求項3】
前記制御部は、
前記搬送対象物が前記所定の位置に到達したときに前記電動モータの回転速度が次第に減少するように前記電動モータを制御することを特徴とする請求項1に記載の搬送装置。
【請求項4】
前記制御部は、
前記搬送対象物が前記所定の位置に到達したときに前記応答性が次第に低下するように前記電動モータを制御することを特徴とする請求項2に記載の搬送装置。
【請求項5】
前記応答性を変更可能に設定する設定部を備えていることを特徴とする請求項2に記載の搬送装置。
【請求項6】
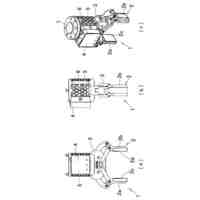
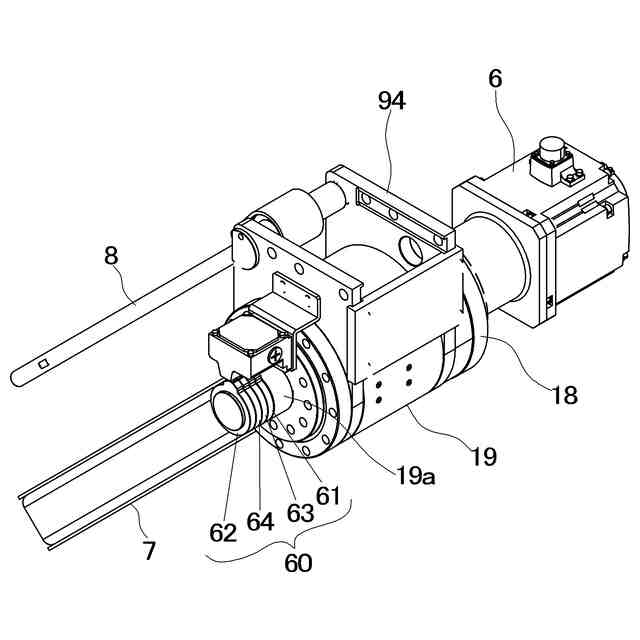
前記電動モータの出力軸には、当該電動モータの回転速度を減速するための減速機が取付けられており、
前記搬送部は、
前記減速機の出力軸に取付けられており、当該出力軸の回転方向と同じ方向に回動可能な回動部と、
前記回動部が水平方向に旋回可能となるように当該回動部を所定箇所に軸支する第1の軸受と、
基端が前記回動部に取付けられており、当該回動部の回動によって先端が昇降可能な第1のアームと、
基端が前記第1のアームの先端に取付けられた第2のアームと、
当該第2のアームが自身の基端を中心にして水平方向に旋回可能となるように、前記第1のアームの先端と当該第2のアームの基端との間に取付けられた第2の軸受と、
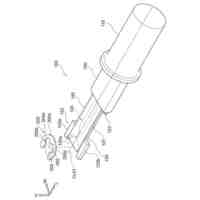
上端が前記第2のアームの先端に取付けられており、当該先端から垂下した第3のアームと、
当該第3のアームが自身の上端を中心にして水平方向に回動可能となるように、前記第2のアームの先端と当該第3のアームの上端との間に取付けられた第3の軸受と、
前記第3のアームに取付けられており、前記搬送対象物を保持するための保持部と、を備えており、
前記操作部は、前記第3のアームに取付けられていることを特徴とする請求項1または請求項2に記載の搬送装置。
【請求項7】
前記減速機は、
前記電動モータからの入力軸と減速後の出力軸とが同一直線状になる構造であることを特徴とする請求項6に記載の搬送装置。
【請求項8】
前記制御部は、
前記回動部の旋回角度に対応する信号を出力する旋回角度検出部を備えており、当該旋回角度検出部から出力される前記信号に基づいて前記回動部の旋回角度を検出し、当該検出した旋回角度に対応して前記電動モータの回転数を制御することを特徴とする請求項6に記載の搬送装置。
【請求項9】
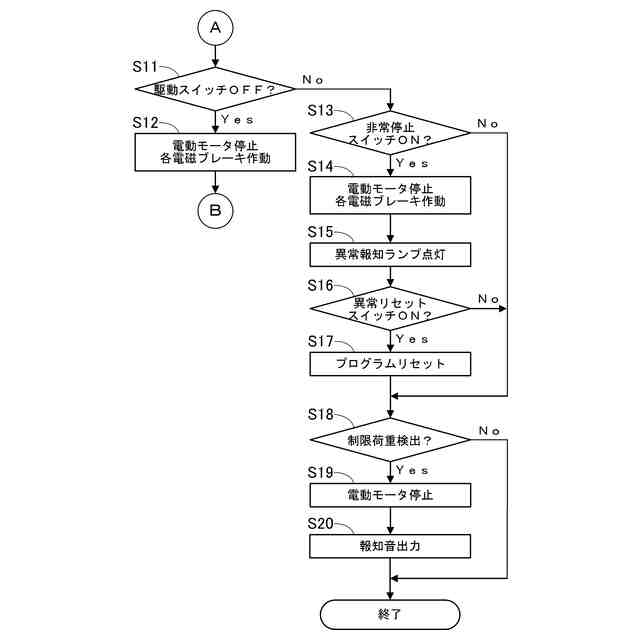
前記第3のアームの下端と前記保持部との間に設けられており、前記保持部によって保持される前記搬送対象物の重量に対応する信号を出力するセンサと、
前記センサから出力される前記信号に基づいて、前記保持部に掛かる重量が所定の重量を超えたと前記制御部が判断したきに、そのことを報知する報知部と、
を備えていることを特徴とする請求項6に記載の搬送装置。
【請求項10】
前記第1の軸受には、前記回動部が水平方向に旋回することを制御する第1の電磁ブレーキが取付けられており、
前記第2の軸受には、前記第2のアームが自身の基端を中心にして水平方向に旋回することを制御する第2の電磁ブレーキが取付けられており、
前記第3の軸受には、前記第3のアームが自身の上端を中心にして水平方向に回動することを制御する第3の電磁ブレーキが取付けられており、
前記操作部には、
前記第1の電磁ブレーキ、前記第2の電磁ブレーキおよび前記第3の電磁ブレーキを同時に作動させるためのブレーキスイッチが設けられていることを特徴とする請求項6に記載の搬送装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願発明は、搬送対象物を搬送する搬送部と、この搬送部を駆動するための電動モータと、この電動モータを操作する操作部とを備えた搬送装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、この種の搬送装置として特許文献1に記載の荷役物運搬機が知られている。この荷役物運搬機は、先端に荷役物を吊すアーム1を備えた昇降機構2と、この昇降機構2を昇降させるためのラック16およびピニオンギア15と、このピニオンギア15と連結されたウォーム減速機14と、このウォーム減速機と連結されたモータ12と、このモータ12に係合された滑りブレーキ13と、アーム1の先端に設けられた速度指令器3と、昇降機構2を旋回させるための旋回台5と、旋回台5が固着されたポール・台座7と、このポール・台座7を移動させるためのキャスター9および手押しバー10とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2002-362900号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
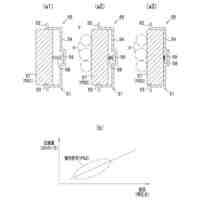
ところで、上記の荷役物運搬機のように、モータを使って荷役物を目標位置に運搬するものでは、荷役物が目標位置に到達したときにモータを停止すると、荷役物の慣性により荷役物が揺動し、静止するまでに時間が掛かる。このため、荷役物が目標位置に到達する前に運搬速度を遅くし、運搬が停止したときの荷役物の慣性を小さくして揺動を抑制する必要がある。
また、荷役物を目標位置に精度良く停止させるためには、荷役物が目標位置に到達する前にモータの回転速度を減速させ、荷役物の位置を微調整する必要がある。
しかし、前述した従来の荷役物運搬機は、作業者が速度指令器を手動で操作してモータの回転速度を制御するため、荷役物が目標位置に近づいたか否かは操作者が目視で判断するので、その判断タイミングが一定しない。
従って、その判断タイミングが早すぎる場合は、荷役物を目標位置に到達させるまでに時間が掛かるし、また、判断タイミングが遅すぎる場合は、荷役物が目標位置を通り過ぎるおそれがあり、作業効率が悪い。
特に、作業経験の浅い作業者は、作業経験が深い作業者と比較して、モータの回転速度を減速させるタイミングを習得するまでに時間が掛かるため、より一層作業効率が悪い。
【0005】
そこで、本願発明は、上述した諸問題を解決するために創出されたものであって、搬送対象物を目標位置に搬送する作業効率を良くすることができる搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(第1の発明)
上述した目的を達成するため、本願の第1の発明に係る搬送装置(1)は、
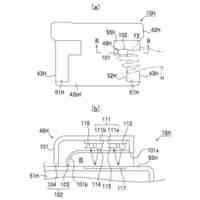
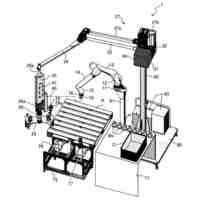
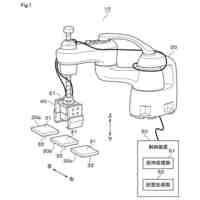
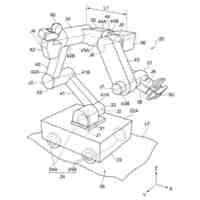
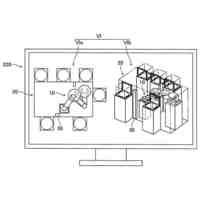
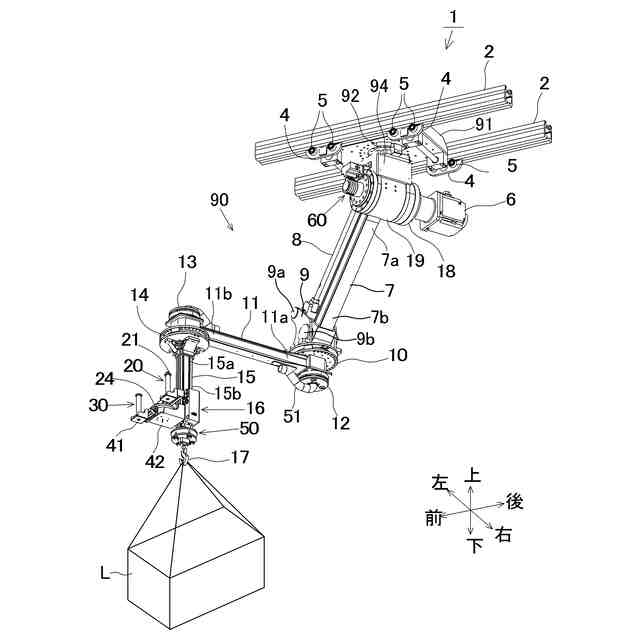
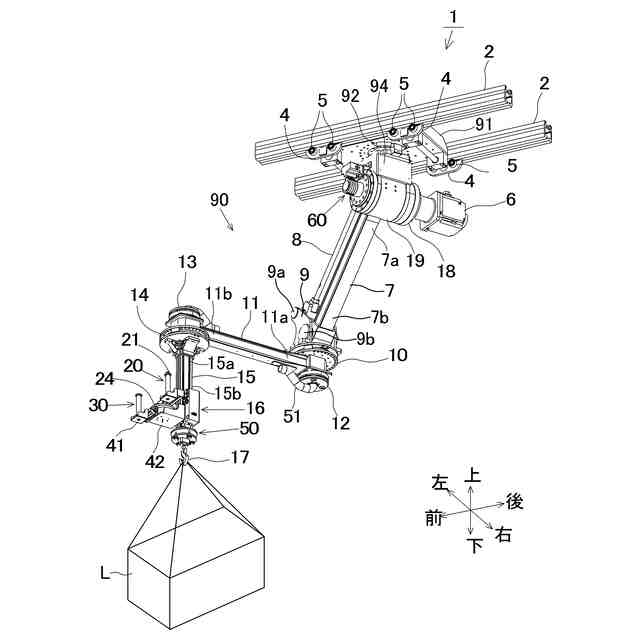
搬送対象物(L:図1)を搬送するための搬送部(90)と、
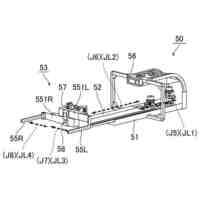
搬送部(90)を駆動するための電動モータ(6:図2)と、
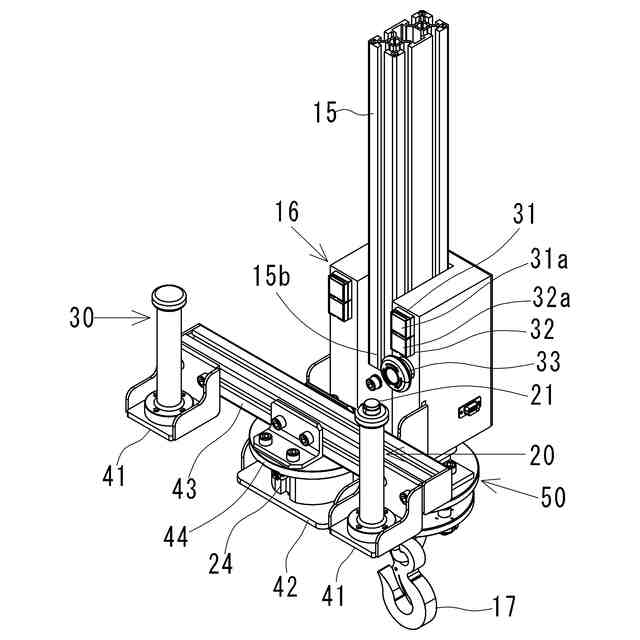
操作部(20,30)と、
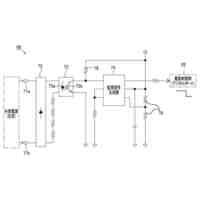
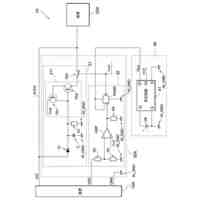
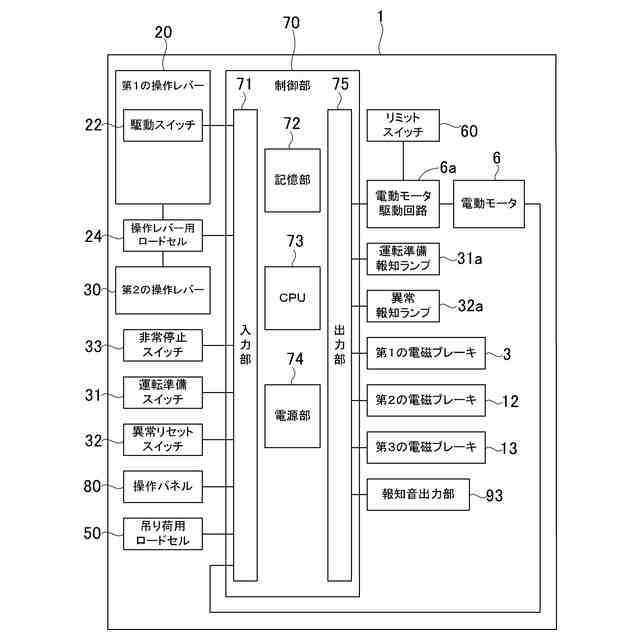
操作部(20,30)が操作されたことを示す操作信号を出力する操作信号出力部(24:図3)と、
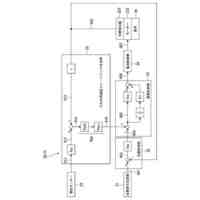
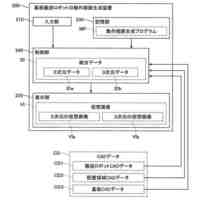
操作信号出力部(24)から出力される操作信号に基づいて電動モータ(6)を制御する制御部(70:図6)と、を備えた搬送装置(1)であって、
制御部(70)は、
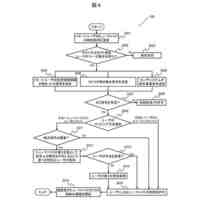
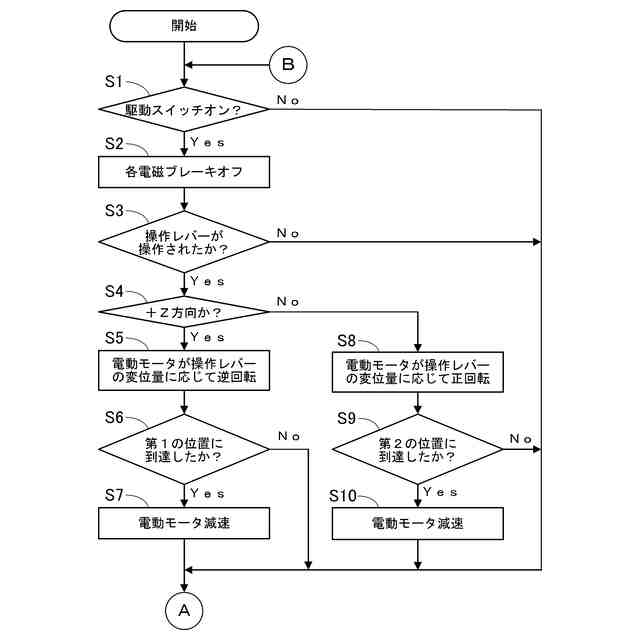
電動モータ(6)が第1の回転速度にて駆動されているときに、搬送対象物(L)が目標位置から離れた所定の位置に到達したと判断したときは、電動モータ(6)の回転速度を第1の回転速度よりも遅い第2の回転速度に減速するように電動モータ(6)を制御することを特徴とする。
【0007】
(第1の発明の効果)
第1の発明によれば、制御部は、電動モータが第1の回転速度にて駆動されているときに、搬送対象物が目標位置から離れた所定の位置に到達したと判断したときは、電動モータの回転速度を第1の回転速度よりも遅い第2の回転速度に減速するように電動モータを制御することができる。
従って、搬送対象物が目標位置から離れた所定の位置に到達するまでは電動モータを減速しないように制御することができるため、搬送対象物を目標位置に搬送する作業効率を良くすることができる。
しかも、従来のように、作業者が電動モータの回転速度を減速させるタイミングを目視で判断する搬送装置とは異なり、作業の経験値に関係無く、電動モータの回転速度を減速させるタイミングを一定にすることができるため、搬送対象物を目標位置に搬送する作業効率を良くすることができる。
さらに、目標位置に対する停止位置が不足したり超過したりしないように制御することができるため、搬送精度を良くすることもできる。
【0008】
(第2の発明)
また、前述した目的を達成するため、本願の第2の発明に係る搬送装置(1)は、
搬送対象物(L:図1)を搬送するための搬送部(90)と、
搬送部(90)を駆動するための電動モータ(6:図2)と、
操作部(20,30)と、
操作部(20,30)の変位量に対応する操作信号を出力する操作信号出力部(24:図3)と、
操作信号出力部(24)から出力される操作信号に基づいて電動モータ(6)を制御する制御部(70:図6)と、を備えた搬送装置(1)であって、
制御部(70)は、
操作信号出力部(24)から出力される操作信号に基づいて電動モータ(6)の回転速度を制御し、かつ、搬送対象物(L)が目標位置から離れた所定の位置に到達したと判断したときは、操作部(20,30)の変位量に対する電動モータ(6)の応答性を低下させることを特徴とする。
【0009】
(第2の発明の効果)
第2の発明によれば、制御部は、操作信号出力部から出力される操作信号に基づいて電動モータの回転速度を制御し、かつ、搬送対象物が目標位置から離れた所定の位置に到達したと判断したときは、操作部の変位量に対する電動モータの応答性を低下させることができる。
従って、搬送対象物が目標位置から離れた所定の位置に到達するまでは、操作部の変位量に対する電動モータの応答性を低下させないように制御することができるため、搬送対象物を目標位置に搬送する作業効率を良くすることができる。
しかも、操作部の変位量に対する電動モータの応答性を低下させるタイミングを作業の経験値に関係無く一定にすることができるため、搬送対象物を目標位置に搬送する作業効率を良くすることができる。
さらに、目標位置に対する停止位置が不足したり超過したりしないように制御することができるため、搬送精度を良くすることもできる。
【0010】
(第3の発明)
また、前述した目的を達成するため、本願の第3の発明に係る搬送装置(1)は、前述した第1の発明に係る搬送装置(1)において、
制御部(70)は、
搬送対象物(L)が所定の位置に到達したときに電動モータ(6)の回転速度が次第に減少するように電動モータ(6)を制御することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
深孔スリーブ駆動ロッド構造
8日前
工機ホールディングス株式会社
作業機
3日前
個人
バール
8日前
梅馨堂合同会社
人協働ロボットシステム
10日前
株式会社デンソーウェーブ
ロボット制御システム
1日前
学校法人法政大学
装着型アシスト装置
5日前
三菱電機株式会社
トルク締め個所検出システム
8日前
高丸工業株式会社
ロボット操作システムの動作方法
8日前
株式会社不二越
ロボットの教示システム及び教示方法
2日前
中国電力株式会社
電動ドライバー
2日前
オムロン株式会社
モバイルロボット
2日前
オムロン株式会社
モバイルロボット
2日前
JUKI株式会社
ハンドリング装置
10日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
2日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
2日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
2日前
シナノケンシ株式会社
把持装置
2日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
2日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
4日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
8日前
トーヨーコーケン株式会社
ワーク搬送システム
2日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
4日前
川崎重工業株式会社
指令値送信装置、制御システム、及び、指令値送信方法
8日前
株式会社不二越
入出力信号保持装置及び入出力信号保持装置システム
10日前
株式会社デンソーウェーブ
ロボットシステム、及び折り畳み方法
5日前
川崎重工業株式会社
ロボット教示方法、及び、教示システム
4日前
株式会社日立製作所
テレイグジスタンスの実施方法およびシステム
2日前
セイコーエプソン株式会社
ロボットの制御方法およびロボットシステム
9日前
オムロン株式会社
多関節ロボット、及びモバイルロボット
2日前
富士フイルムビジネスイノベーション株式会社
止め輪装着工具
4日前
ARMA株式会社
UI付エンドエフェクタ
11日前
川崎重工業株式会社
ロボットの動作経路生成方法およびロボットの動作経路生成装置
3日前
川崎重工業株式会社
ロボットの動作経路生成方法およびロボットの動作経路生成装置
3日前
東京ロボティクス株式会社
物体操作装置、多関節ロボットアーム、及び移動ロボット
8日前
川崎重工業株式会社
ロボットの動作経路生成方法およびロボットの動作経路生成装置
3日前
株式会社国際電気通信基礎技術研究所
制御信号送信システム、及びリフレクトアレー
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ