TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025056948
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023166500
出願日
2023-09-27
発明の名称
ロボットの動作経路生成方法およびロボットの動作経路生成装置
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することが可能なロボットの動作経路生成方法を提供する。
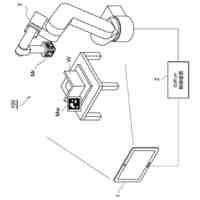
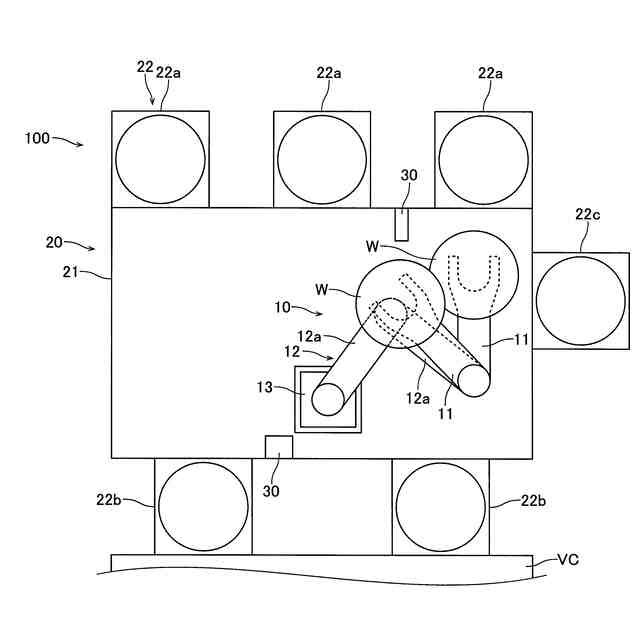
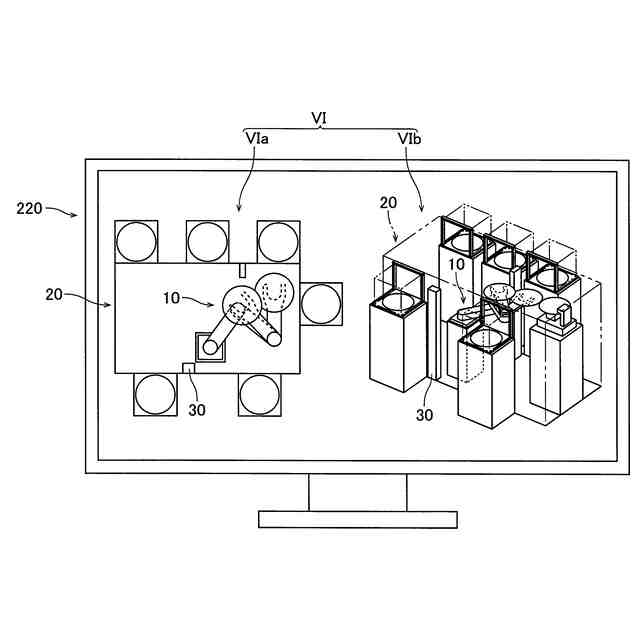
【解決手段】この基板搬送ロボット10の動作経路生成方法では、基板搬送ロボット10の、基板搬送ロボット10および基板Wが配置される配置領域20における動作経路OPの導出に用いられる、基板搬送ロボット10のコンピュータ支援設計データである搬送ロボットCADデータCD1および配置領域のコンピュータ支援設計データである配置領域CADデータCD2を読み込む。
【選択図】図2
特許請求の範囲
【請求項1】
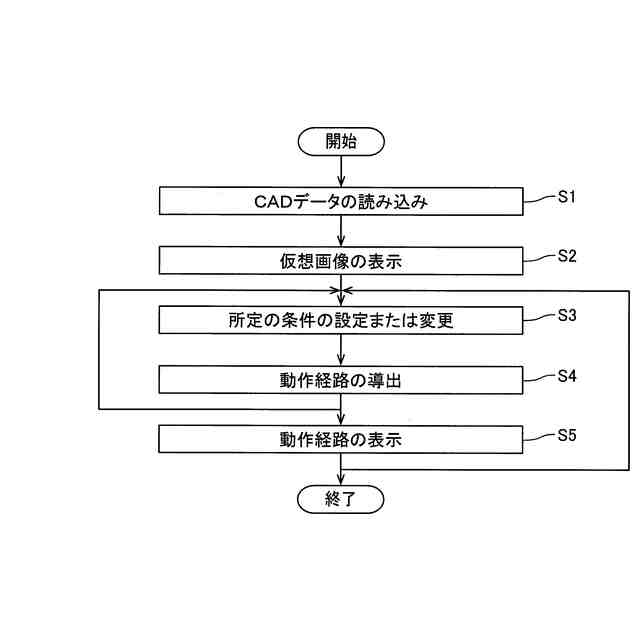
ワークを保持するエンドエフェクタと、前記エンドエフェクタが取り付けられ複数のリンクが互いに接続されたロボットアームと、を含むロボットの、前記ロボットおよび前記ワークが配置される配置領域における動作経路を所定の条件に基づいてシミュレーションして導出することと、
前記動作経路の導出に用いられる、前記ロボットのコンピュータ支援設計データであるロボットCADデータおよび前記配置領域のコンピュータ支援設計データである配置領域CADデータを読み込むことと、
読み込まれた前記ロボットCADデータと前記配置領域CADデータとを統合した統合データに基づいて、前記ロボットと前記配置領域とを含む仮想画像を表示部に表示させることと、を備える、ロボットの動作経路生成方法。
続きを表示(約 1,700 文字)
【請求項2】
前記仮想画像を前記表示部に表示させることは、3次元の前記仮想画像を前記表示部に表示させることを含む、請求項1に記載のロボットの動作経路生成方法。
【請求項3】
ユーザの操作に基づいて、前記統合データにおける、前記ロボットの構成部分の大きさ、前記ロボットの構成部分の位置、前記ロボットの姿勢、前記配置領域の構成部分の大きさ、前記配置領域の構成部分の位置の少なくともいずれかを変更することを備える、請求項1に記載のロボットの動作経路生成方法。
【請求項4】
前記ロボットの前記構成部分の大きさおよび位置の少なくとも一方を変更することは、前記ユーザの操作に基づいて、前記統合データにおける前記ロボットの前記構成部分としての前記リンクおよび前記エンドエフェクタの少なくとも一方の長さおよび位置を変更することを含む、請求項3に記載のロボットの動作経路生成方法。
【請求項5】
前記配置領域CADデータを読み込むことは、前記ワークが載置されるワーク載置部を含む前記配置領域CADデータを読み込むことを含み、
前記配置領域の前記構成部分の大きさおよび位置の少なくとも一方を変更することは、前記ユーザの操作に基づいて、前記統合データにおける前記配置領域の前記構成部分としての前記ワーク載置部の位置を変更することを含む、請求項3に記載のロボットの動作経路生成方法。
【請求項6】
前記配置領域CADデータを読み込むことは、前記ロボットが動作する際の障害となる障害物を含む前記配置領域CADデータを読み込むことを含み、
前記配置領域の前記構成部分の大きさおよび位置の少なくとも一方を変更することは、前記ユーザの操作に基づいて、前記統合データにおける前記配置領域の前記構成部分としての前記障害物の位置および大きさの少なくとも一方を変更することを含む、請求項3に記載のロボットの動作経路生成方法。
【請求項7】
前記配置領域CADデータを読み込むことは、前記ロボットが動作する際の障害となる障害物を含む前記配置領域CADデータを読み込むことを含み、
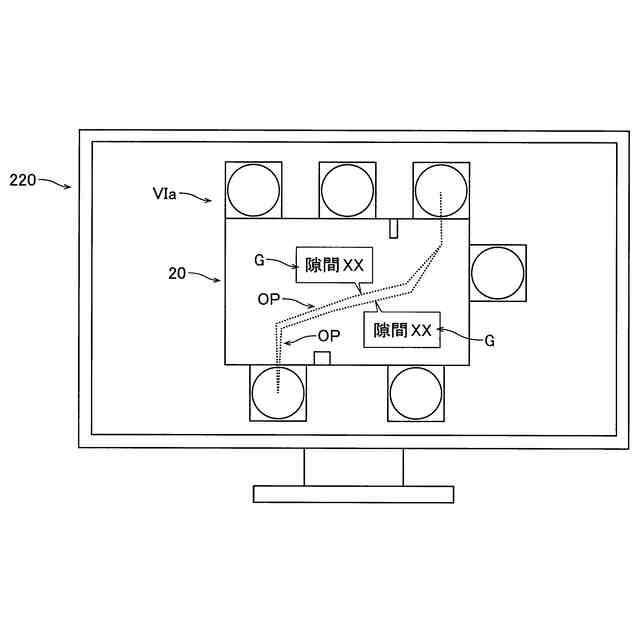
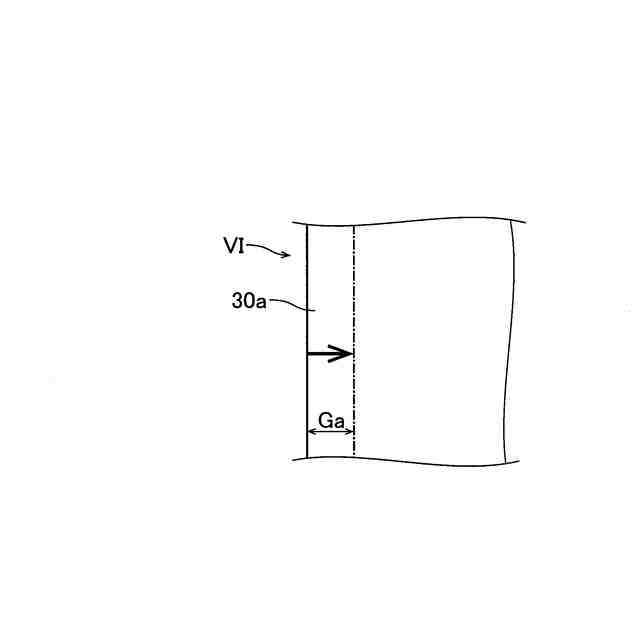
導出された前記動作経路を前記表示部に表示させることを備え、
前記動作経路を前記表示部に表示させることは、前記統合データにおける前記動作経路上の前記ロボットと前記配置領域の構成部分としての前記障害物との間の隙間の大きさを前記表示部に表示させることを含む、請求項1に記載のロボットの動作経路生成方法。
【請求項8】
前記仮想画像を前記表示部に表示させることは、ユーザの操作に基づいて2次元の前記仮想画像に対応する前記統合データにおける2次元データおよび3次元の前記仮想画像に対応する前記統合データにおける3次元データの一方が変更された場合に、前記2次元データおよび前記3次元データの他方に反映させながら、前記2次元の仮想画像および前記3次元の仮想画像の少なくとも一方を前記表示部に表示させることを含む、請求項1に記載のロボットの動作経路生成方法。
【請求項9】
前記動作経路の導出に用いられる、前記ワークのコンピュータ支援設計データであるワークCADデータを読み込むことをさらに備え、
前記仮想画像を前記表示部に表示させることは、読み込まれた前記ロボットCADデータと前記配置領域CADデータと前記ワークCADデータとを統合した前記統合データに基づいて、前記ロボットと前記配置領域と前記ワークとを含む前記仮想画像を前記表示部に表示させることを含む、請求項1に記載のロボットの動作経路生成方法。
【請求項10】
前記ワークは、基板であり、
前記エンドエフェクタは、ハンドであり、
前記ロボットアームは、水平多関節型のロボットアームであり、
前記配置領域は、前記基板が搬送される基板搬送室と、前記基板搬送室に接続されるとともに前記基板が載置される基板載置部と、を含む、請求項1に記載のロボットの動作経路生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットの動作経路生成方法およびロボットの動作経路生成装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、ロボットの動作経路を所定の条件に基づいて導出するロボット軌道生成方法が知られている。たとえば、特許文献1には、ロボットアームが他のロボットアームや障害物に干渉しないように、ロボットの動作経路を導出するロボット軌道生成方法が開示されている。特許文献1のロボット軌道生成方法では、ロボットの動作経路を所定の条件に基づいて導出するためのロボット軌道生成プログラムが演算処理部にインストールされる。そして、演算処理部は、ロボットの動作経路を所定の条件に基づいて導出する。
【先行技術文献】
【特許文献】
【0003】
特開2019-193975号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されているロボット軌道生成方法では、ロボットの動作経路を所定の条件に基づいて導出するためのロボット軌道生成プログラムが演算処理部にインストールされ、演算処理部は、ロボットの動作経路を所定の条件に基づいて導出する。したがって、動作経路の導出に用いられるロボットのデータとロボットが配置される配置領域のデータとを任意に組み合わせることができない。このため、ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することが可能なロボットの動作経路生成方法およびロボットの動作経路生成装置が望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することが可能なロボットの動作経路生成方法およびロボットの動作経路生成装置を提供することである。
【課題を解決するための手段】
【0006】
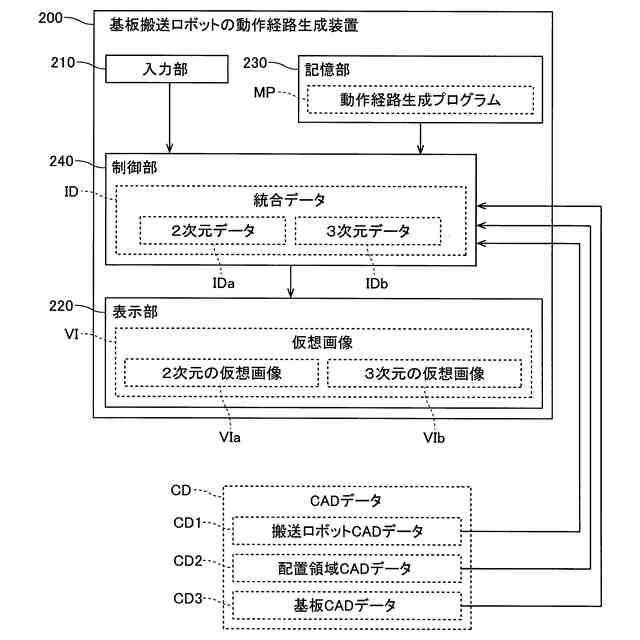
上記目的を達成するために、この開示の第1の局面によるロボットの動作経路生成方法は、ワークを保持するエンドエフェクタと、エンドエフェクタが取り付けられ複数のリンクが互いに接続されたロボットアームと、を含むロボットの、ロボットおよびワークが配置される配置領域における動作経路を所定の条件に基づいてシミュレーションして導出することと、動作経路の導出に用いられる、ロボットのコンピュータ支援設計データであるロボットCADデータおよび配置領域のコンピュータ支援設計データである配置領域CADデータを読み込むことと、読み込まれたロボットCADデータと配置領域CADデータとを統合した統合データに基づいて、ロボットと配置領域とを含む仮想画像を表示部に表示させることと、を備える。
【0007】
この開示の第1の局面によるロボットの動作経路生成方法では、上記のように、ロボットの、ロボットおよびワークが配置される配置領域における動作経路の導出に用いられる、ロボットのコンピュータ支援設計データであるロボットCADデータおよび配置領域のコンピュータ支援設計データである配置領域CADデータを読み込む。これにより、ロボットの配置領域における動作経路を導出する際に用いられるロボットCADデータおよび配置領域CADデータを、ユーザが任意に組み合せて読み込ませることができる。その結果、ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することができる。また、第1の局面によるロボットの動作経路生成方法では、上記のように、読み込まれたロボットCADデータと配置領域CADデータとを統合した統合データに基づいて、ロボットと配置領域とを含む仮想画像を表示部に表示させる。これにより、ユーザは、表示部に表示されたロボットと配置領域とを含む仮想画像を見ることによって、ロボットの配置領域における動作経路を導出する際の所定の条件を容易に検討することができる。
【0008】
また、上記目的を達成するために、この開示の第2の局面によるロボットの動作経路生成装置は、表示部と、ワークを保持するエンドエフェクタと、エンドエフェクタが取り付けられ複数のリンクが互いに接続されたロボットアームと、を含むロボットの、ロボットおよびワークが配置される配置領域における動作経路を所定の条件に基づいてシミュレーションして導出し、動作経路の導出に用いられる、ロボットのコンピュータ支援設計データであるロボットCADデータおよび配置領域のコンピュータ支援設計データである配置領域CADデータを読み込み、読み込まれたロボットCADデータと配置領域CADデータとを統合した統合データに基づいて、ロボットと配置領域とを含む仮想画像を表示部に表示させる制御部と、を備える。
【0009】
この開示の第2の局面によるロボットの動作経路生成装置は、上記のように、ロボットの、ロボットおよびワークが配置される配置領域における動作経路の導出に用いられる、ロボットのコンピュータ支援設計データであるロボットCADデータおよび配置領域のコンピュータ支援設計データである配置領域CADデータを読み込む制御部を備える。これにより、上記第1の局面によるロボットの動作経路生成方法と同様に、ロボットの配置領域における動作経路を導出する際に用いられるロボットCADデータおよび配置領域CADデータを、ユーザが任意に組み合せて読み込ませることができる。その結果、上記第1の局面によるロボットの動作経路生成方法と同様に、ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することが可能なロボットの動作経路生成装置を提供することができる。また、上記第2の局面によるロボットの動作経路生成装置では、上記のように、制御部は、読み込まれたロボットCADデータと配置領域CADデータとを統合した統合データに基づいて、ロボットと配置領域とを含む仮想画像を表示部に表示させる。これにより、上記第1の局面によるロボットの動作経路生成方法と同様に、ユーザは、表示部に表示されたロボットと配置領域とを含む仮想画像を見ることによって、ロボットの配置領域における動作経路を導出する際の所定の条件を容易に検討することができる。
【発明の効果】
【0010】
本開示によれば、上記のように、ロボットのデータと配置領域のデータとを任意に組み合わせてロボットの配置領域における動作経路を導出することが可能なロボットの動作経路生成方法およびロボットの動作経路生成装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
25日前
株式会社不二越
ロボット
17日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
住友重機械工業株式会社
ロボット
11日前
庄内機械株式会社
釘打装置
4日前
株式会社アイエイアイ
グリッパー
6日前
株式会社イノウ
給油口キャップ用開閉具
18日前
川崎重工業株式会社
制動システム
17日前
株式会社不二越
垂直多関節ロボット
18日前
芝浦機械株式会社
双腕ロボット
10日前
トヨタ自動車東日本株式会社
搬送治具
4日前
アイホン株式会社
ネジ締めカウントシステム
19日前
トヨタ自動車株式会社
荷姿影響緩和方法
7日前
パナソニック株式会社
工具
18日前
パナソニック株式会社
工具
18日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
住友重機械工業株式会社
ロボット及びカバー
11日前
アピュアン株式会社
エアー式衝撃工具
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
電動工具
4日前
株式会社ダイヘン
端末装置
4日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
4日前
株式会社マキタ
打ち込み工具
19日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
11日前
株式会社マキタ
打ち込み工具
4日前
住友重機械工業株式会社
アクチュエータ支持部材
10日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
SB C&S株式会社
治具セット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ