TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044764
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152529
出願日
2023-09-20
発明の名称
制御信号送信システム、及びリフレクトアレー
出願人
株式会社国際電気通信基礎技術研究所
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】リンク機構に制御信号をより確実に送信することができる制御信号送信システムを提供する。
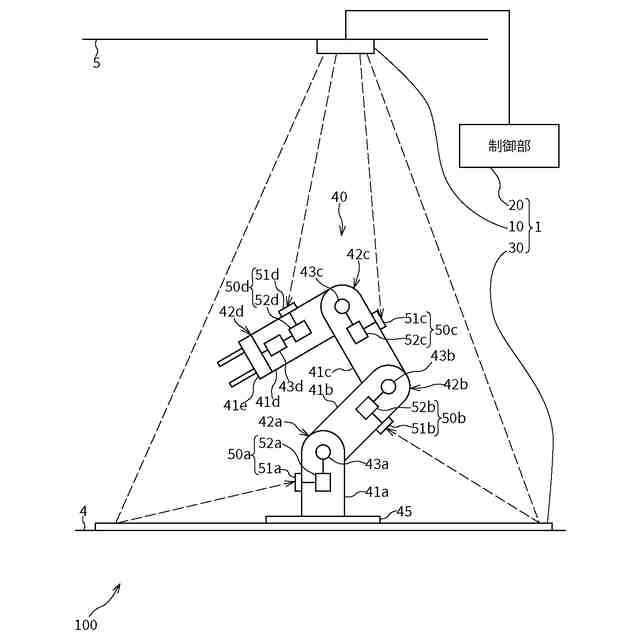
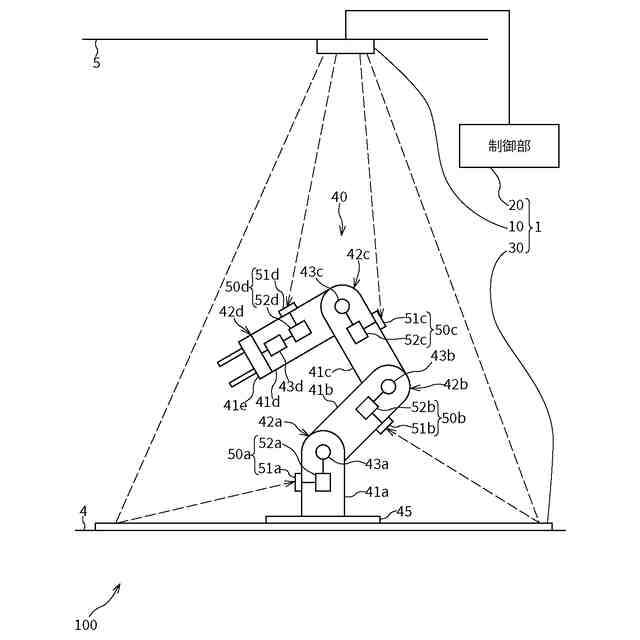
【解決手段】制御信号送信システム1は、駆動手段によって駆動される関節42によって連結された複数のリンク41を有するリンク機構40における1以上のリンク41に、基地側アンテナを介して電波を送信する基地側送信部10と、基地側送信部10を介して、1以上のリンク41に関節42の角度の変更を指示する制御信号を送信する制御部20と、基地側送信部10から送信された電波を反射するリフレクトアレー30と、を備え、基地側アンテナとリフレクトアレー30とは、基地側アンテナとリフレクトアレー30との間にリンク機構40が位置するように配置されている。
【選択図】図1
特許請求の範囲
【請求項1】
駆動手段によって駆動される関節によって連結された複数のリンクを有するリンク機構における1以上のリンクに、基地側アンテナを介して電波を送信する基地側送信部と、
前記基地側送信部を介して、前記1以上のリンクに関節の角度の変更を指示する制御信号を送信する制御部と、
前記基地側送信部から送信された電波を反射するリフレクトアレーと、を備え、
前記基地側アンテナと前記リフレクトアレーとは、当該基地側アンテナと当該リフレクトアレーとの間に前記リンク機構が位置するように配置されている、制御信号送信システム。
続きを表示(約 620 文字)
【請求項2】
前記リフレクトアレーは、前記リンクに設けられたリンク側通信部に、リンクの稼働により見通し内通信が遮蔽された場合であっても見通し外通信を行うように配置されている、請求項1記載の制御信号送信システム。
【請求項3】
前記基地側アンテナは、前記リンク機構に向けて電波が放射されるように指向性が設定されており、
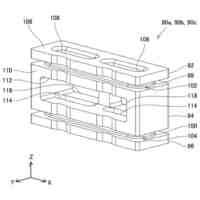
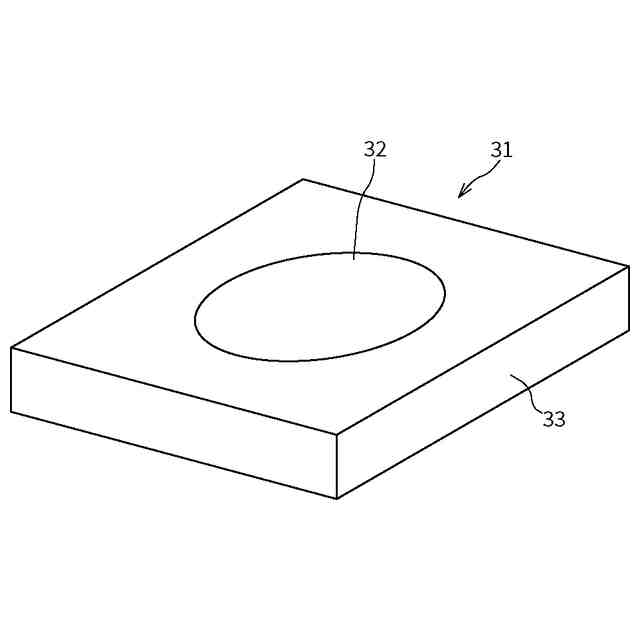
前記リフレクトアレーは、平面状に配置された複数の反射素子を有しており、前記基地側アンテナから放射された電波が前記リフレクトアレーの略法線方向から入射するように配置されており、
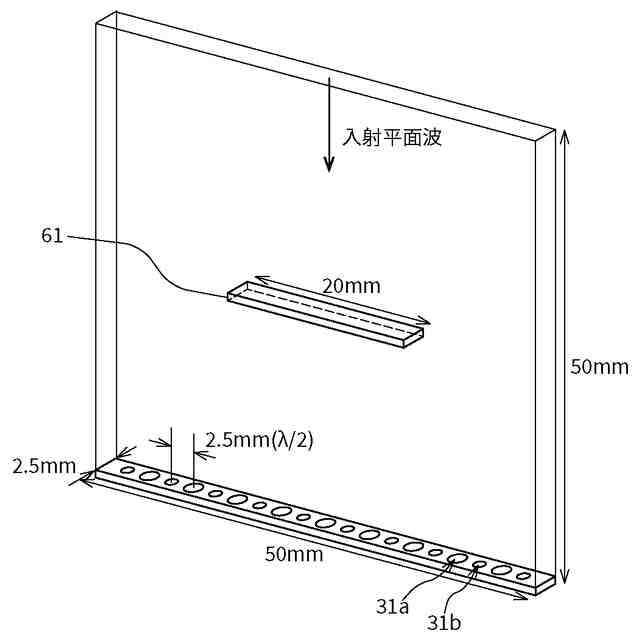
前記複数の反射素子は、エンドファイヤ条件を満たすように配置されている、請求項1または請求項2記載の制御信号送信システム。
【請求項4】
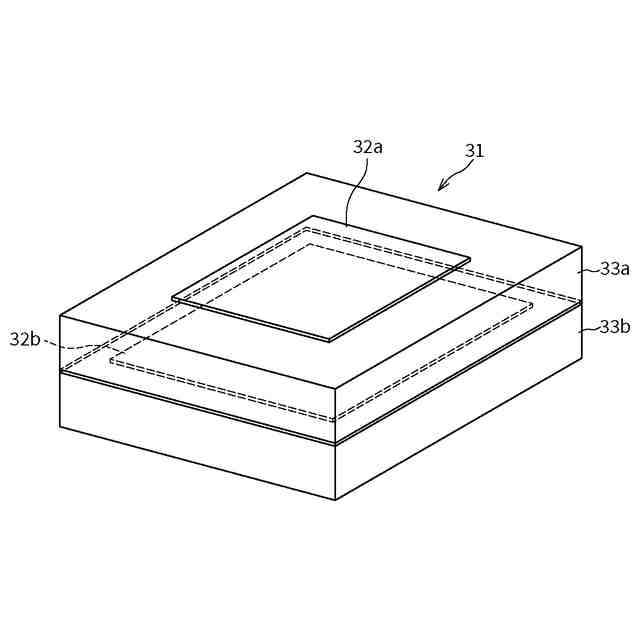
入射した電波を反射するリフレクトアレーであって、
平面状に配置された複数の反射素子を有しており、
前記複数の反射素子は、第1の方向、及び前記第1の方向と直交する第2の方向において、それぞれ前記電波の半波長の間隔で配置されており、
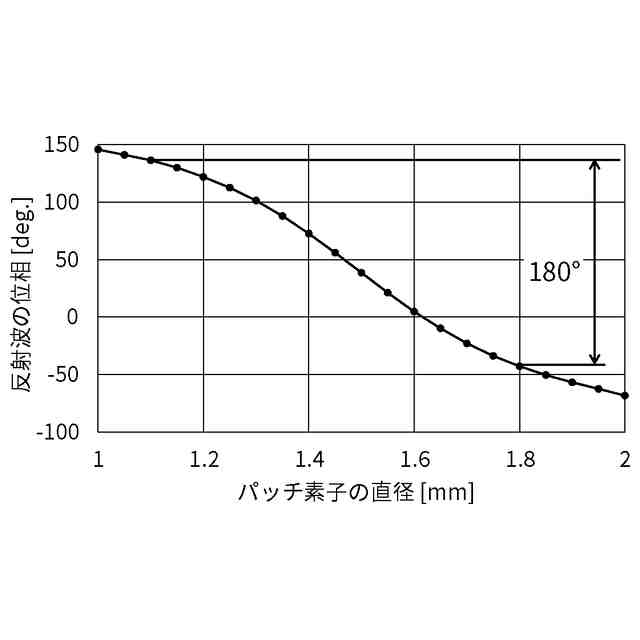
前記第1及び第2の方向において隣接する2個の前記反射素子の反射位相は、実質的に180度異なっており、
前記第1の方向に沿った反射素子の隣接した2つの列である第1及び第2の反射素子列のそれぞれにおいて、前記第1の方向の第1及び第2の位置における反射素子の反射位相の位相差は同じである、リフレクトアレー。
発明の詳細な説明
【技術分野】
【0001】
本発明は、入射した電波を反射するリフレクトアレー、及びそのリフレクトアレーを用いた制御信号送信システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、ロボットアームなどの複数のリンクが関節によって連結されたリンク機構において、制御用の配線を低減させるため、制御信号を無線で送受信することによって、リンク機構の関節を駆動させることが行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-151675号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
リンク機構が有するリンクに制御信号を無線で送信する際に、ミリ波帯などの低遅延無線通信を用いる場合には、電波の直進性が高く、回折しにくいという特徴がある。そのため、制御信号を送信する送信側のアンテナと、その制御信号を受信するリンク機構の受信側のアンテナとの間にリンク等が存在する場合には、両アンテナ間で見通し内通信を行うことができず、リンク機構に制御信号を送信できない事態が生じ得るという課題がある。
【0005】
本発明は、上記課題を解決するためになされたものであり、リンク機構に制御信号をより確実に送信することができる制御信号送信システム、及びその制御信号送信システムで用いることができるリフレクトアレーを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による制御信号送信システムは、駆動手段によって駆動される関節によって連結された複数のリンクを有するリンク機構における1以上のリンクに、基地側アンテナを介して電波を送信する基地側送信部と、基地側送信部を介して、1以上のリンクに関節の角度の変更を指示する制御信号を送信する制御部と、基地側送信部から送信された電波を反射するリフレクトアレーと、を備え、基地側アンテナとリフレクトアレーとは、基地側アンテナとリフレクトアレーとの間にリンク機構が位置するように配置されている、ものである。
このような構成により、制御信号を送信する基地側アンテナと、その制御信号を受信するリンク機構の受信側のアンテナとの間で見通し内通信を行うことができない場合であっても、リフレクトアレーによって電波を反射させることができ、見通し外通信によってリンク機構に制御信号をより確実に送信することができるようになる。
【0007】
また、本発明の一態様による制御信号送信システムでは、リフレクトアレーは、リンクに設けられたリンク側通信部に、リンクの稼働により見通し内通信が遮蔽された場合であっても見通し外通信を行うように配置されていてもよい。
このような構成により、リンク機構の関節の駆動に応じて基地側アンテナとリンク側のアンテナとが見通し内通信を行うことができなくなったとしても、両アンテナ間でリフレクトアレーを介した見通し外通信を行うことができるようになる。
【0008】
また、本発明の一態様による制御信号送信システムでは、基地側アンテナは、リンク機構に向けて電波が放射されるように指向性が設定されており、リフレクトアレーは、平面状に配置された複数の反射素子を有しており、基地側アンテナから放射された電波がリフレクトアレーの略法線方向から入射するように配置されており、複数の反射素子は、エンドファイヤ条件を満たすように配置されていてもよい。
このような構成により、リフレクトアレーによって、入射した電波を多数の方向に拡散させることができ、基地側アンテナから送信された制御信号を、リンク機構の受信側のアンテナでより確実に受信できるようになる。
【0009】
また、本発明の一態様によるリフレクトアレーは、入射した電波を反射するリフレクトアレーであって、平面状に配置された複数の反射素子を有しており、複数の反射素子は、エンドファイヤ条件を満たすように配置されており、複数の反射素子は、第1の方向、及び第1の方向と直交する第2の方向において、それぞれ電波の半波長の間隔で配置されており、第1及び第2の方向において隣接する2個の反射素子の反射位相は、実質的に180度異なっており、第1の方向に沿った反射素子の隣接した2つの列である第1及び第2の反射素子列のそれぞれにおいて、第1の方向の第1及び第2の位置における反射素子の反射位相の位相差は同じであってもよい。
このような構成により、リフレクトアレーによって電波を拡散させることができ、例えば、見通し外通信によって電波を受信できる範囲を広げることができる。
【発明の効果】
【0010】
本発明の一態様による制御信号送信システムによれば、制御信号の送信側のアンテナと、リンク機構における受信側のアンテナとの間で見通し内通信を行うことができない場合であっても、リフレクトアレーによって電波を反射させることができ、見通し外通信によってリンク機構に制御信号をより確実に送信することができるようになる。また、本発明の一態様によるリフレクトアレーによれば、入射した電波を多数の方向に拡散させることができ、例えば、見通し外通信によって電波を受信できる範囲を広げることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
21日前
株式会社アイセイ
搬送装置
27日前
株式会社不二越
ロボット
13日前
個人
けがき用治具
15日前
国立大学法人金沢大学
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
5日前
株式会社不二越
ロボット操作装置
12日前
川崎重工業株式会社
ロボット
13日前
川崎重工業株式会社
ロボットシステム
21日前
工機ホールディングス株式会社
作業機
今日
株式会社黒澤鉄工製作所
けがき用治具
15日前
個人
バール
5日前
株式会社デンソー
操縦桿
13日前
梅馨堂合同会社
人協働ロボットシステム
7日前
株式会社不二越
基板搬送用ロボット
22日前
アピュアン株式会社
衝撃工具
28日前
ARMA株式会社
UI付エンドエフェクタ
8日前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
作業機
12日前
株式会社マキタ
電動工具
27日前
学校法人法政大学
装着型アシスト装置
2日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
27日前
株式会社マキタ
電動工具
27日前
若井ホールディングス株式会社
レンチ構造とその製造方法
15日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
27日前
三菱電機株式会社
トルク締め個所検出システム
5日前
株式会社マキタ
打ち込み工具
27日前
高丸工業株式会社
ロボット操作システムの動作方法
5日前
セイコーエプソン株式会社
ロボットシステム
1か月前
シブヤパッケージングシステム株式会社
物品移載装置
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ