TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025029702
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134479
出願日
2023-08-22
発明の名称
ロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250228BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】基台の移動状態に応じて適切な制振制御を行うことができるロボットシステムを提供すること。
【解決手段】基台と、基台に支持されるロボットアームと、ロボットアームの所定部位に設置され、所定部位の加速度を検出して加速度信号を出力するとともに、所定部位の角速度を検出して角速度信号を出力する慣性センサーと、慣性センサーが出力した加速度信号または角速度信号に基づいて、ロボットアームに発生する振動の制御を行う制振制御部と、を備え、制振制御部は、基台の移動状態に応じて、振動の制御に用いる加速度信号または角速度信号の組み合わせを選択することを特徴とするロボットシステム。
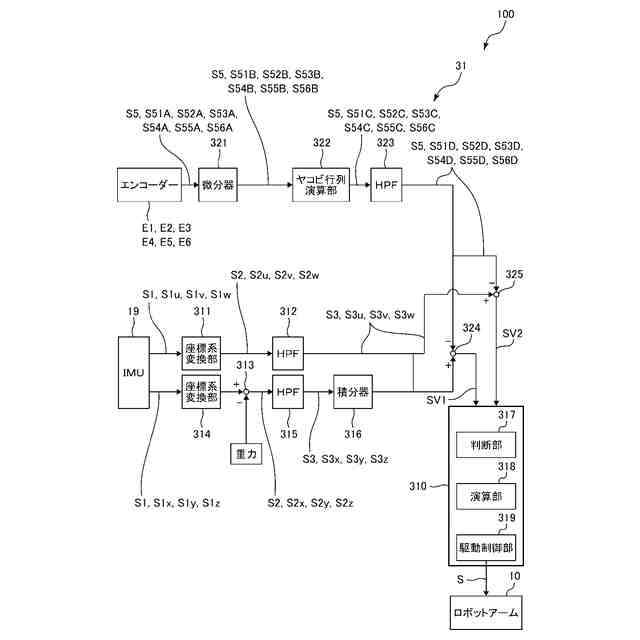
【選択図】図3
特許請求の範囲
【請求項1】
基台と、
前記基台に支持されるロボットアームと、
前記ロボットアームの所定部位に設置され、前記所定部位の加速度を検出して加速度信号を出力するとともに、前記所定部位の角速度を検出して角速度信号を出力する慣性センサーと、
前記慣性センサーが出力した前記加速度信号または前記角速度信号に基づいて、前記ロボットアームに発生する振動の制御を行う制振制御部と、を備え、
前記制振制御部は、前記基台の移動状態に応じて、前記振動の制御に用いる前記加速度信号または前記角速度信号の組み合わせを選択することを特徴とするロボットシステム。
続きを表示(約 660 文字)
【請求項2】
前記制振制御部は、前記基台が並進運動を行っており、かつ回転運動を行っていない場合、前記角速度信号を用いて前記振動の制御を行う請求項1に記載のロボットシステム。
【請求項3】
前記制振制御部は、前記基台が並進運動および回転運動のいずれも行っていない場合、前記加速度信号および前記角速度信号を用いて前記振動の制御を行う請求項1に記載のロボットシステム。
【請求項4】
前記制振制御部は、前記基台が回転運動を行っている場合、前記振動の制御を行わない請求項1に記載のロボットシステム。
【請求項5】
前記制振制御部は、前記所定部位の回転方向の速度が第1閾値を超えた場合、前記基台が回転運動を行っていると判断する請求項1ないし4のいずれか1項に記載のロボットシステム。
【請求項6】
前記制振制御部は、前記所定部位の並進方向の速度が第2閾値を超えた場合、前記基台が並進運動を行っていると判断する請求項1ないし4のいずれか1項に記載のロボットシステム。
【請求項7】
前記制振制御部は、入力された動作プログラムに基づいて、前記基台の前記移動状態を判断する請求項1ないし4のいずれか1項に記載のロボットシステム。
【請求項8】
前記基台の前記移動状態を検出する検出部を備え、
前記制振制御部は、前記検出部の検出値に基づいて、前記基台の前記移動状態を判断する請求項1ないし4のいずれか1項に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、工場では人件費の高騰や人材不足により、ロボットアームを有するロボットによって、例えば部品や製品の製造、加工、組み立て等の作業が行われるようになり、人手で行われてきた作業の自動化が図られている。このようなロボットでは、ロボットの駆動を円滑にし、前記作業をより良好に行うために、ロボットの駆動に伴う振動の制御、すなわち、制振制御が行われる。
【0003】
特許文献1に記載されているロボットは、ロボットアームと、ロボットアームの先端部に内蔵された加速度センサーとを備え、加速度センサーが検出した検出値に基づいて、ロボットの振動を抑制する制振制御が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2011-136395号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ロボット設置面に対し基台が移動するロボットの場合、特許文献1に記載されている制振制御をそのまま適用すると、基台の移動状態(移動パターン)によっては、適正な制振制御がなされないことがある。すなわち、制振制御の精度不足による不利益、例えばロボットの前記作業における位置精度が低下するといった問題が生じる。
【課題を解決するための手段】
【0006】
本発明のロボットシステムは、基台と、
前記基台に支持されるロボットアームと、
前記ロボットアームの所定部位に設置され、前記所定部位の加速度を検出して加速度信号を出力するとともに、前記所定部位の角速度を検出して角速度信号を出力する慣性センサーと、
前記慣性センサーが出力した前記加速度信号または前記角速度信号に基づいて、前記ロボットアームに発生する振動の制御を行う制振制御部と、を備え、
前記制振制御部は、前記基台の移動状態に応じて、前記振動の制御に用いる前記加速度信号または前記角速度信号の組み合わせを選択する。
【図面の簡単な説明】
【0007】
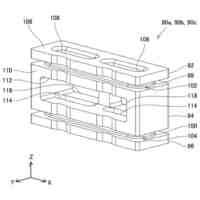
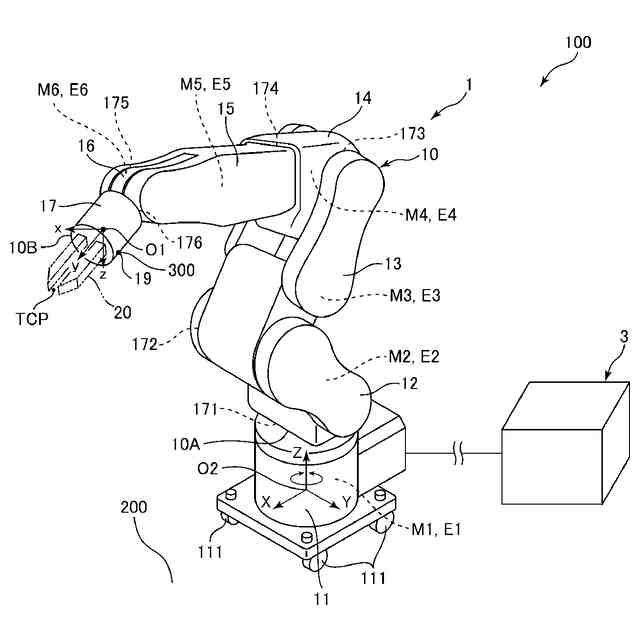
図1は、本発明のロボットシステムの第1実施形態の全体構成を示す図である。
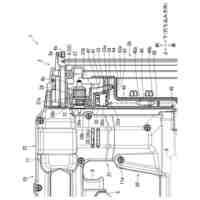
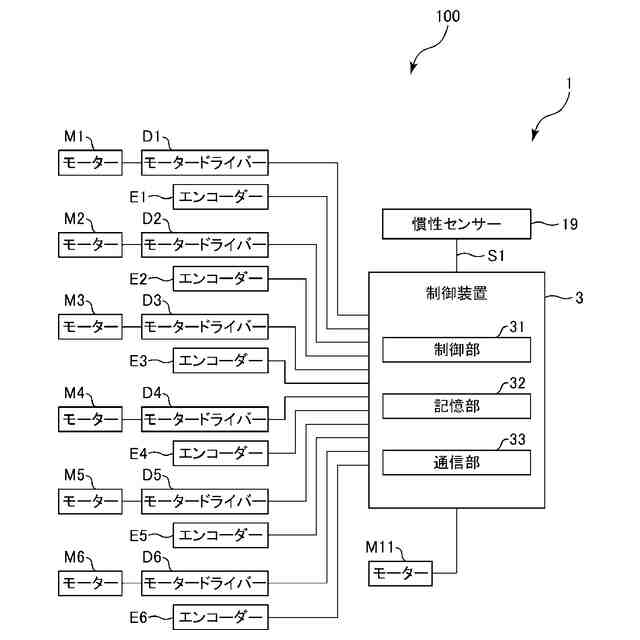
図2は、図1に示すロボットシステムのブロック図である。
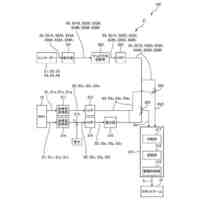
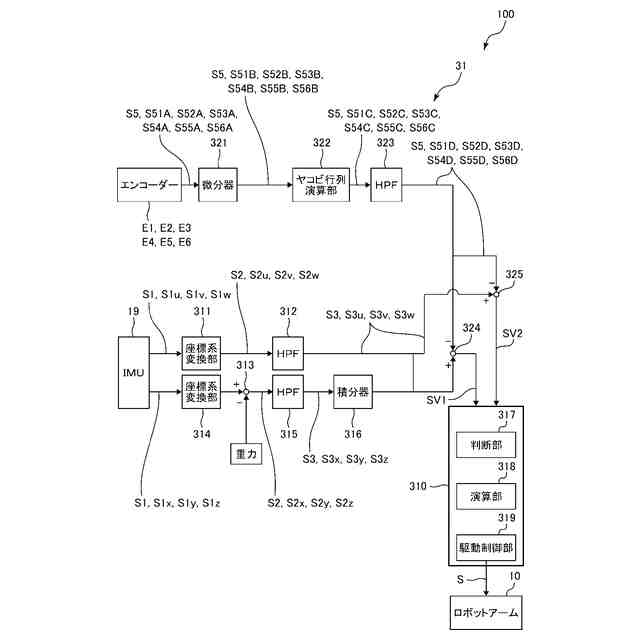
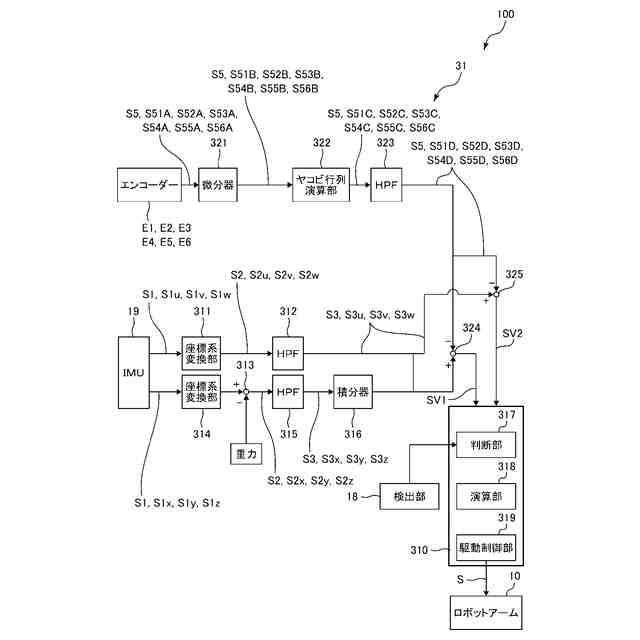
図3は、図2に示す制御部が行う各処理を説明するための概略構成図である。
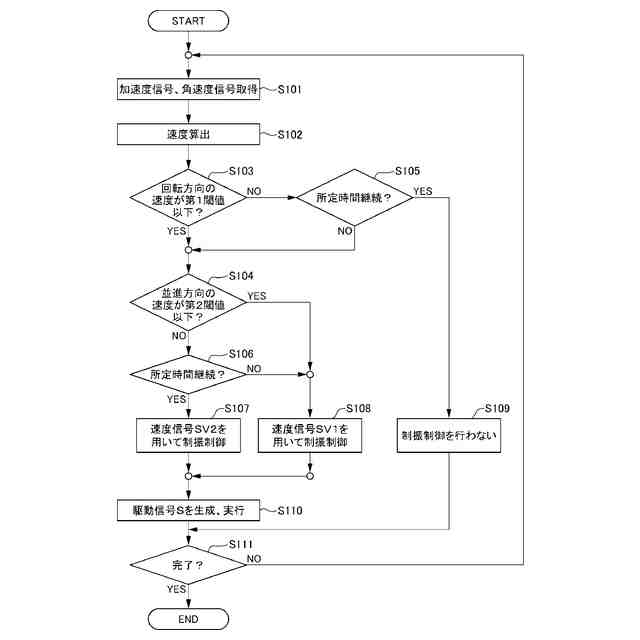
図4は、図2に示す制御部が行う制御動作の一例を説明するためのフローチャートである。
図5は、本発明のロボットシステムの第2実施形態の制御部が行う各処理を説明するための概略構成図である。
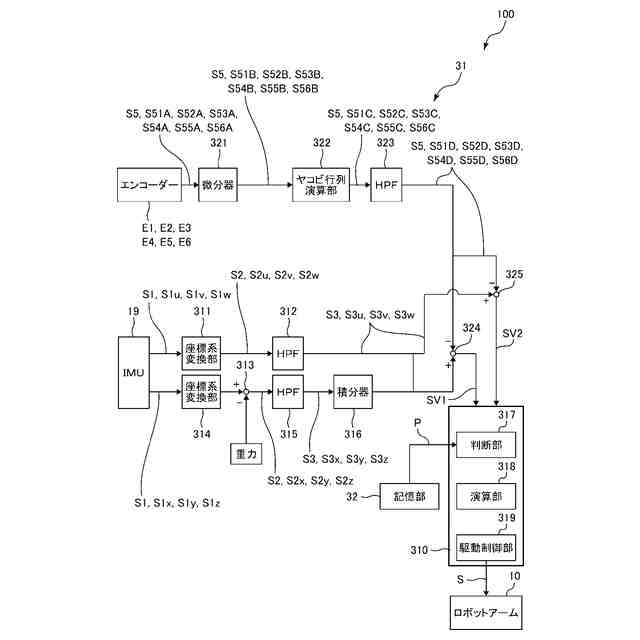
図6は、本発明のロボットシステムの第3実施形態の制御部が行う各処理を説明するための概略構成図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットシステムを添付図面に示す好適な実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、本発明のロボットシステムの第1実施形態の全体構成を示す図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図2に示す制御部が行う各処理を説明するための概略構成図である。図4は、図2に示す制御部が行う制御動作の一例を説明するためのフローチャートである。
【0010】
なお、以下では、説明の便宜上、ロボットアーム10については、図1中の基台11側を「基端」または「基端側」、その反対側、すなわち、エンドエフェクター20側を「先端」または「先端側」とも言う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
29日前
川崎重工業株式会社
ハンド
23日前
個人
けがき用治具
17日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット
15日前
個人
深孔スリーブ駆動ロッド構造
7日前
株式会社不二越
ロボット操作装置
14日前
川崎重工業株式会社
ロボット
15日前
個人
バール
7日前
川崎重工業株式会社
ロボットシステム
23日前
工機ホールディングス株式会社
作業機
2日前
株式会社黒澤鉄工製作所
けがき用治具
17日前
株式会社デンソー
操縦桿
15日前
梅馨堂合同会社
人協働ロボットシステム
9日前
アピュアン株式会社
衝撃工具
1か月前
ARMA株式会社
UI付エンドエフェクタ
10日前
株式会社不二越
基板搬送用ロボット
24日前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社デンソーウェーブ
ロボット制御システム
今日
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
29日前
株式会社マキタ
電動工具
29日前
株式会社マキタ
作業機
14日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
29日前
株式会社マキタ
電動工具
29日前
学校法人法政大学
装着型アシスト装置
4日前
株式会社マキタ
電動工具
29日前
若井ホールディングス株式会社
レンチ構造とその製造方法
17日前
株式会社マキタ
作業機
1か月前
三菱電機株式会社
トルク締め個所検出システム
7日前
株式会社マキタ
打ち込み工具
29日前
高丸工業株式会社
ロボット操作システムの動作方法
7日前
セイコーエプソン株式会社
ロボットシステム
1か月前
シブヤパッケージングシステム株式会社
物品移載装置
15日前
中国電力株式会社
電動ドライバー
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ