TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025033320
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023138964
出願日
2023-08-29
発明の名称
電動工具
出願人
株式会社マキタ
代理人
弁理士法人岡田国際特許事務所
主分類
B25F
5/00 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】バッテリを装着した電動工具を過って床面上に落下させた場合等におけるバッテリの耐久性を高める。
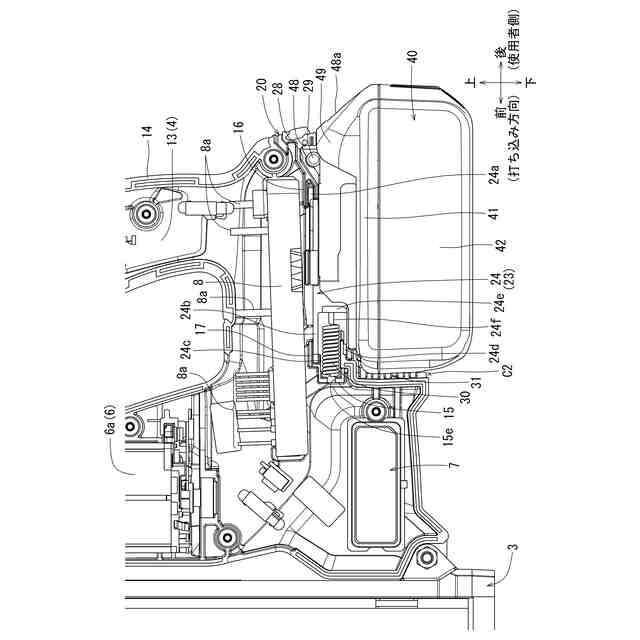
【解決手段】バッテリ40の第1部41がスライドして装着されるバッテリ装着部20と、バッテリ装着部20に対してスライド可能に設けられかつバッテリ40の第1部41に設けられた接続端子と電気的に接続される電源端子部23を有する。電源端子部23とともにバッテリ40がバッテリ装着部20に対して変位した際に第1部41よりも電源端子部23から遠い第2部42と当接する衝撃受け部31を有する。落下時の衝撃を第2部42で受けることでバッテリ40にせん断力が付加されないようにして耐久性を高める。
【選択図】図4
特許請求の範囲
【請求項1】
電動工具であって、
バッテリの第1部がスライドして装着されるバッテリ装着部と、
前記バッテリ装着部に対してスライド可能に設けられかつ前記バッテリの前記第1部に設けられた接続端子と電気的に接続される電源端子部と、
前記電源端子部とともに前記バッテリが前記バッテリ装着部に対して変位した際に前記第1部よりも前記電源端子部から遠い前記バッテリの第2部と当接する衝撃受け部を有する電動工具。
続きを表示(約 1,000 文字)
【請求項2】
請求項1記載の電動工具であって、
前記電源端子部を通常位置に向けて付勢する弾性体を有する電動工具。
【請求項3】
請求項2に記載の電動工具であって、
前記通常位置では前記弾性体の付勢力が前記電源端子部に作用しない電動工具。
【請求項4】
請求項2又は3記載の電動工具であって、
前記弾性体は、工具本体に設けた保持部に弾性変形した状態で保持される電動工具。
【請求項5】
請求項2~4の何れか1つに記載の電動工具であって、
前記バッテリ装着部に対する前記バッテリの装着方向と、前記バッテリ装着部に対する前記電源端子部のスライド方向が同じである電動工具。
【請求項6】
請求項1~5の何れか1つに記載の電動工具であって、
前記電源端子部は、スライド方向の前後部のそれぞれにおいて前記バッテリ装着部にスライド可能に支持される前摺動ガイドと後摺動ガイドを有する電動工具。
【請求項7】
請求項6に記載の電動工具であって、
前記電源端子部を通常位置に向けて付勢する弾性体を有し、
前記前摺動ガイドは前レールであり、前記後摺動ガイドは後レールであり、
前記電源端子部の前記前レールが前記弾性体を保持する電動工具。
【請求項8】
請求項1~7の何れか1つに記載の電動工具であって、
前記電源端子部を通常位置に向けて付勢する弾性体を有し、
前記弾性体は圧縮コイルバネであり、
前記電源端子部は、前記バッテリの前記接続端子に電気的に接続される本体側端子を有し、
前記弾性体は、前記バッテリの装着方向に直交する方向の両側に配置され、かつ両側の前記弾性体の間に前記本体側端子が位置する電動工具。
【請求項9】
請求項1~8の何れか1つに記載の電動工具であって、
工具本体の前部にモータによって作動する出力部が設けられ、
前記バッテリの重心が、前記バッテリを装着した状態の前記工具本体の重心よりも後方に位置するように前記バッテリ装着部が配置される電動工具。
【請求項10】
請求項1~9の何れか1つに記載の電動工具であって、
前記電動工具が釘打ち機である電動工具。
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えば充電式のバッテリを電源として取り付け可能な電動工具に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
バッテリを取り付けた状態で電動工具を落下させると、比較的重量の大きなバッテリが例えば床面に先に衝突して損傷を受けやすい。例えば充電式のバッテリは、概ね六面体の箱形を有して、工具本体側のバッテリ装着部にスライドさせて装着可能となっている。バッテリは、工具本体側の電源端子が接続される端子受け部を支持するアッパハウジングと複数本のセルを収容するロアハウジングを有する。アッパハウジングに、バッテリ装着部に係合されるスライドレールが設けられている。バッテリは、工具本体の先端出力部とは反対側の後部側の下部に装着される。
【0003】
電動工具の落下時にはバッテリのロアハウジングの角部が先に床面に衝突する。その結果、落下時の衝撃がバッテリに対してアッパハウジングとロアハウジングを相互に前後方向に分離するせん断力として作用する。これにより例えばロアハウジングに収容したセルが損傷を受ける。特許文献1にはバッテリに電気的に接続される電源端子を工具本体に対して変位可能かつばね付勢して設けることでチャタリングを抑制する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
独国特許出願公開第102005020358号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
本開示は、電動工具の例えば落下時におけるバッテリの耐久性を高めることを目的とする。
【課題を解決するための手段】
【0006】
本開示の1つの局面によれば、電動工具は、例えばバッテリの第1部がスライドして装着されるバッテリ装着部と、バッテリ装着部に対してスライド可能に設けられかつバッテリの第1部に設けられた接続端子と電気的に接続される電源端子部を有する。電動工具は、例えば電源端子部とともにバッテリがバッテリ装着部に対して変位した際に第1部よりも電源端子部から遠いバッテリの第2部と当接する衝撃受け部を有する。
【0007】
従って、電動工具の落下時において、例えばバッテリの第1部よりも電源端子部から遠い第2部の後角部が床面に衝突する。電源端子部とバッテリがバッテリ装着部に対して変位可能であることで落下時の衝撃がバッテリの第1部に付加されない。落下時の衝撃は第2部が衝撃受け部に当接して受けられる。これにより落下時の衝撃がバッテリに対して衝撃付加方向のせん断力(第1部と第2部を相互に衝撃付加方向とその反対方向にずらすせん断力)として作用することが抑制される。これにより例えば電動工具の落下時あるいはバッテリの第2部の後角部を他部位にぶつけた場合等の衝撃付加時におけるバッテリの耐久性が高められる。
【図面の簡単な説明】
【0008】
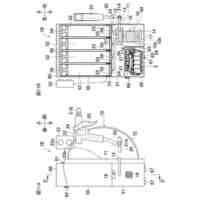
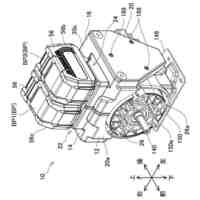
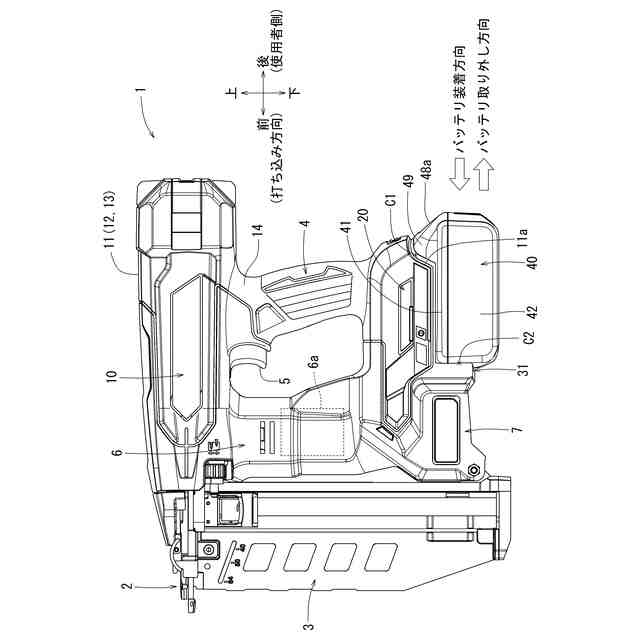
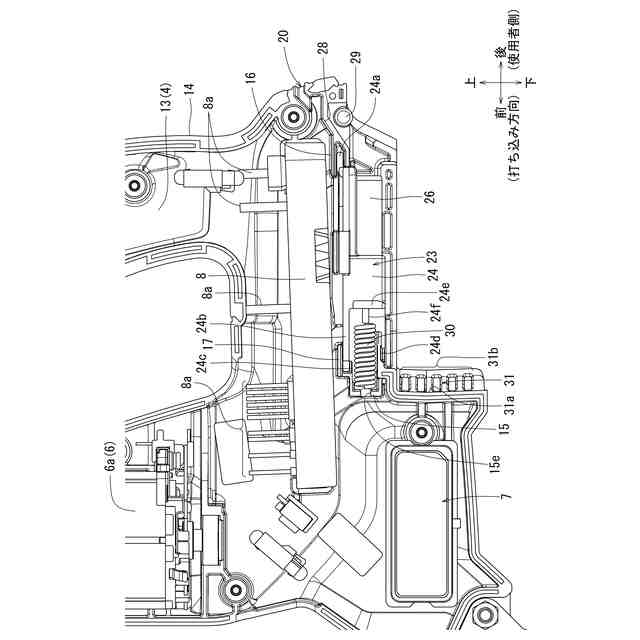
電動工具の左側面図である。
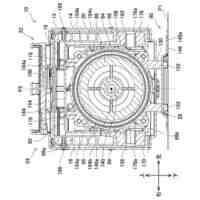
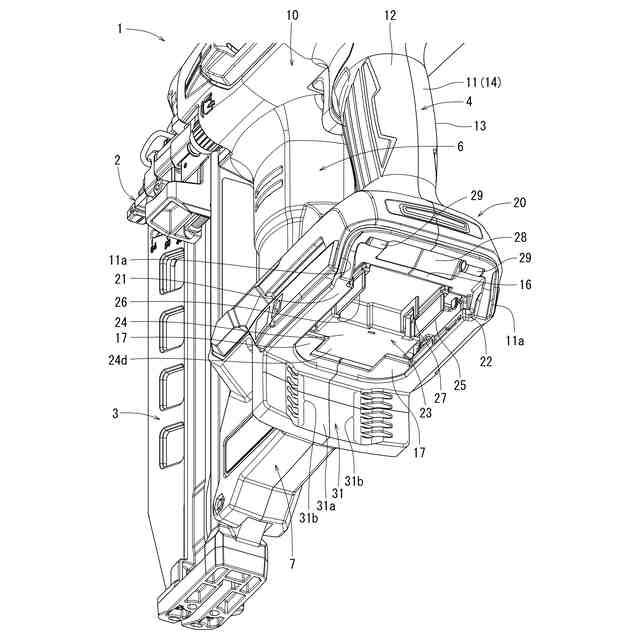
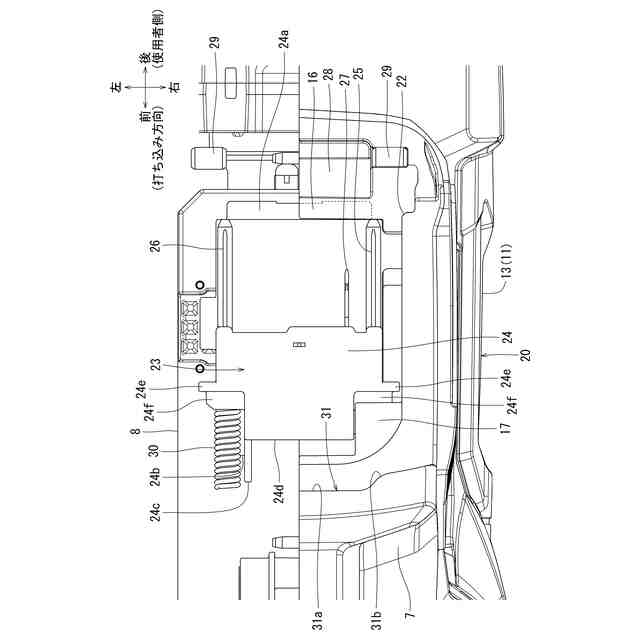
バッテリ装着部の斜視図である。
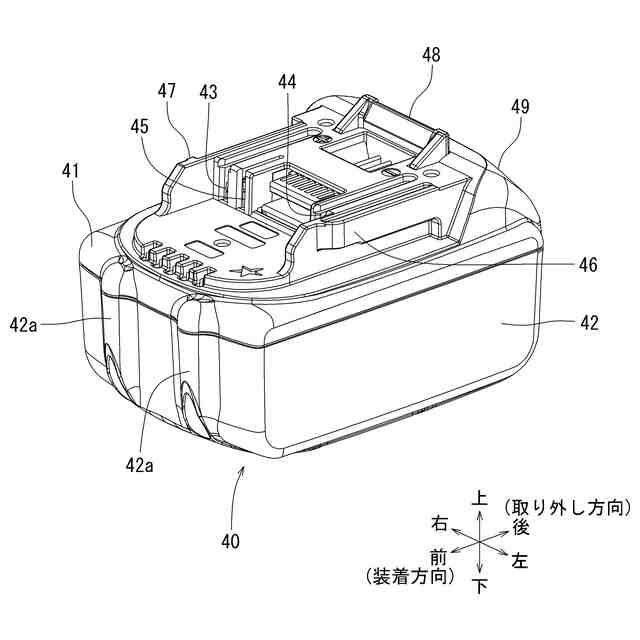
バッテリの斜視図である。
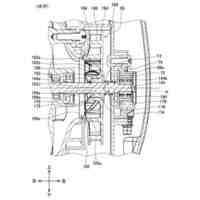
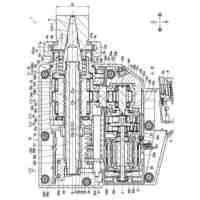
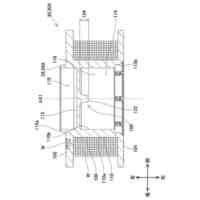
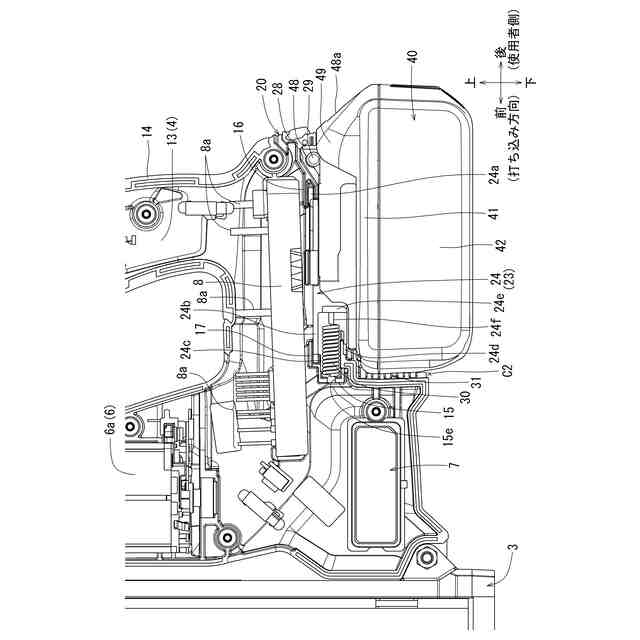
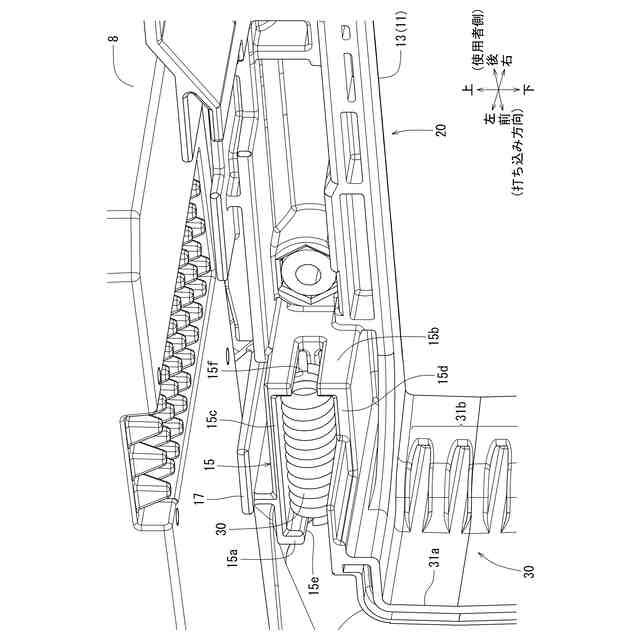
バッテリを装着した状態のバッテリ装着部の縦断面図である。
バッテリを取り外した状態のバッテリ装着部の縦断面図である。
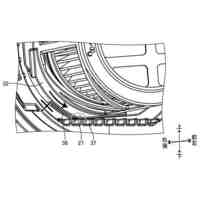
バッテリ装着部の下面図である。本図は左ハウジングが取り外された状態で示されている。
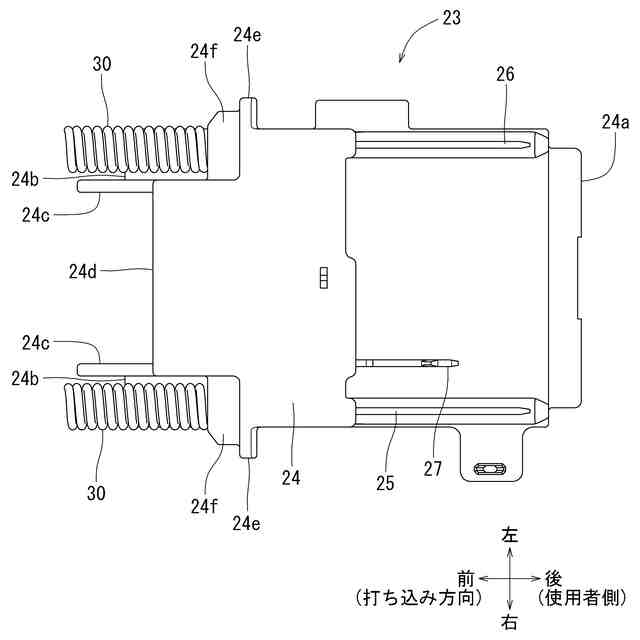
電源端子部の下面図である。
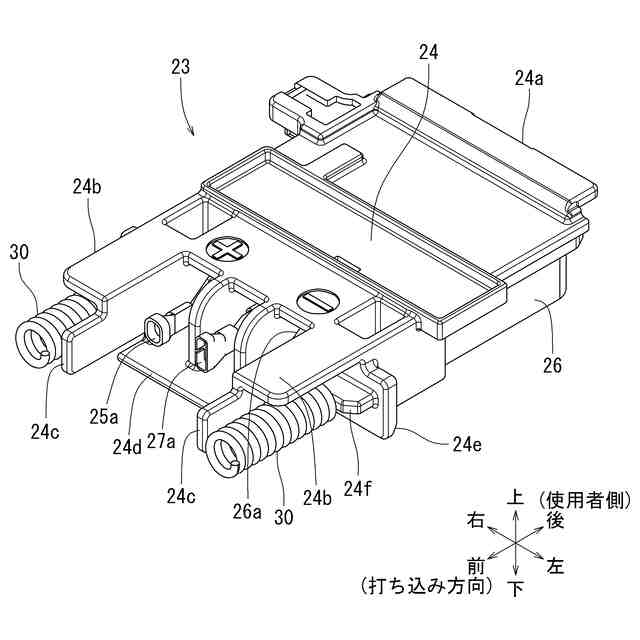
電源端子部の斜視図である。
弾性体の保持部の斜視図である。本図は、右ハウジング側の保持部を示している。
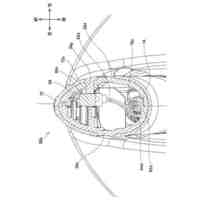
電動工具の左側面図である。本図は、電動工具が落下して床面にバッテリの後角部が衝突した状態を示している。本図では電動工具の上下方向が重力方向に対して時計周り方向にずれて示されている。
【発明を実施するための形態】
【0009】
1つ又はそれ以上の実施態様において、例えば電動工具は、電源端子部を通常位置に向けて付勢する弾性体を有する。従って落下時等の衝撃付加時を除く通常の使用状態では電源端子部が一定の通常位置に保持される。
【0010】
1つ又はそれ以上の実施態様において、例えば通常位置では弾性体の付勢力が電源端子部に作用しない。従って、衝撃付加時において電源端子部が弾性体の付勢力を受けることなく容易に変位し易くなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
12日前
株式会社マキタ
作業機
12日前
株式会社マキタ
クリーナ
1か月前
株式会社マキタ
管拡径工具
5日前
株式会社マキタ
打ち込み工具
5日前
株式会社マキタ
作業ロボット
13日前
株式会社マキタ
作業ロボット
13日前
株式会社マキタ
インパクト工具
19日前
株式会社マキタ
インパクト工具
19日前
株式会社マキタ
モータユニット
21日前
株式会社マキタ
グリース吐出装置
4日前
株式会社マキタ
自律移動システム
13日前
株式会社マキタ
鉄筋結束機およびリール
19日前
株式会社マキタ
モータユニットおよび作業機
21日前
株式会社マキタ
グリース吐出装置及びグリース注油システム
4日前
株式会社マキタ
インパクト工具、スピンドル及びスピンドルの製造方法
20日前
OMC株式会社
ロボット
18日前
株式会社クレスコ
補助吸着具
11日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
3日前
株式会社不二越
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社エビス
腰ベルト用連結具
18日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
26日前
株式会社デンソー
操縦桿
1か月前
個人
バール
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
株式会社イノウ
給油口キャップ用開閉具
4日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
3日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
4日前
アイホン株式会社
ネジ締めカウントシステム
5日前
パナソニック株式会社
工具
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ