TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025055388
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023164710
出願日
2023-09-27
発明の名称
ロボット教示方法、及び、教示システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
9/22 20060101AFI20250401BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット教示に関し、オペレータの作業量を低減する。
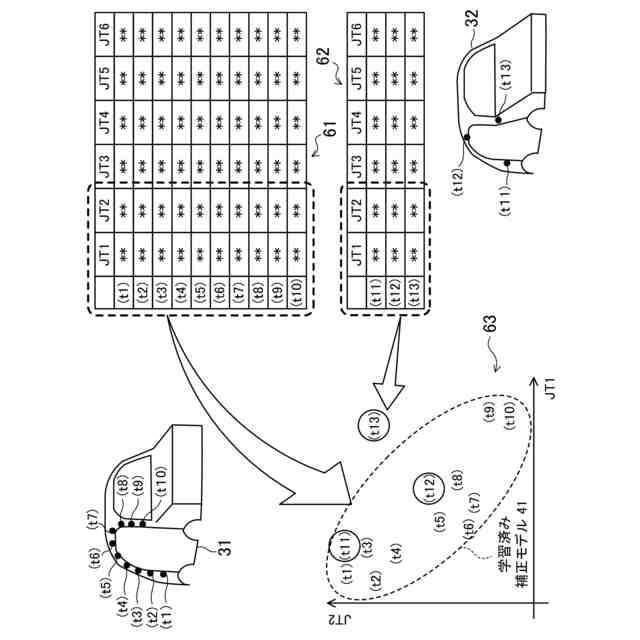
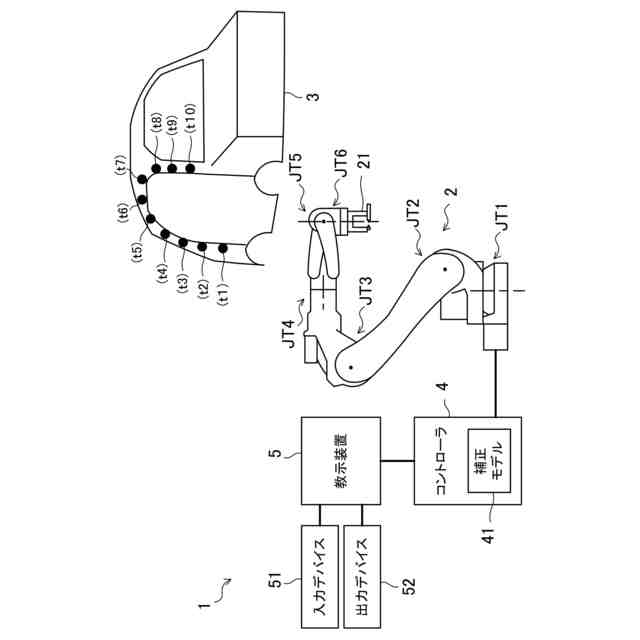
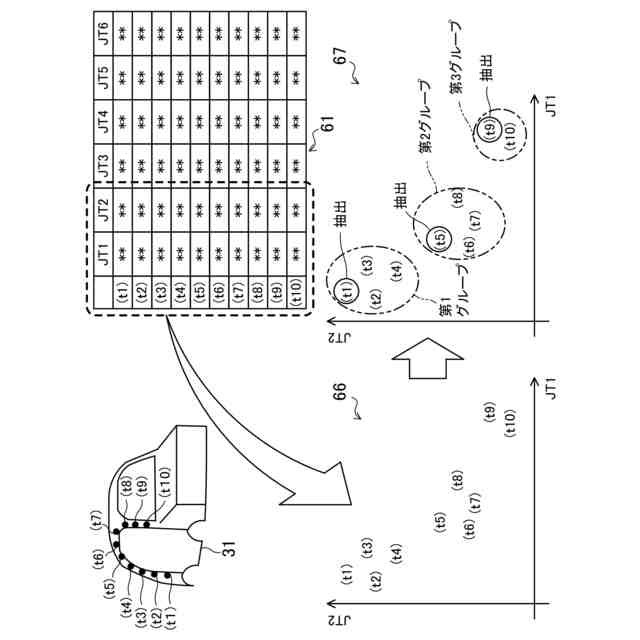
【解決手段】ロボット教示方法は、絶対位置誤差の補正モデル41を使って制御されるロボット2がワーク31、32に対する作業を行うための複数の教示点(t1)-(t13)であって、オフライン教示によりロボットに与えられる教示点を、コンピュータが読み込み、複数の教示点それぞれにおけるロボットの動作の類似度に基づき、複数の教示点の中から、補正モデルによる補正を調整する教示点を、コンピュータが抽出し、抽出した教示点を、コンピュータが出力する。
【選択図】図3
特許請求の範囲
【請求項1】
絶対位置誤差の補正モデルを使って制御されるロボットがワークに対する作業を行うための複数の教示点であって、オフライン教示により前記ロボットに与えられる教示点を、コンピュータが読み込み、
前記複数の教示点それぞれにおける前記ロボットの動作の類似度に基づき、前記複数の教示点の中から、前記補正モデルによる補正を調整する教示点を、前記コンピュータが抽出し、
抽出した前記教示点を、前記コンピュータが出力する、
ロボット教示方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載のロボット教示方法において、
前記補正モデルは、前記教示点に基づいて学習され、
前記コンピュータは、第1ワークに対する第1教示点であって、前記補正モデルに学習済みの第1教示点と、前記第1ワークとは種類が異なる第2ワークに対する複数の第2教示点であって、前記補正モデルに未学習の第2教示点と、を読み込み、
前記コンピュータは、前記第1教示点における前記ロボットの動作と、前記第2教示点における前記ロボットの動作と、の類似度に基づき、前記複数の第2教示点の中から、前記第1教示点に類似しない前記第2教示点を抽出する、
ロボット教示方法。
【請求項3】
請求項2に記載のロボット教示方法において、
前記第1教示点は、前記第1教示点における前記ロボットの動作の類似度に基づき、一又は複数のグループに分類され、
前記コンピュータは、前記第1教示点における前記ロボットの動作と、前記第2教示点における前記ロボットの動作と、の類似度に基づき、前記グループに属さない前記第2教示点を抽出する、
ロボット教示方法。
【請求項4】
請求項3に記載のロボット教示方法において、
前記補正モデルは、前記グループ毎に個別に、当該グループに含まれる教示点に基づいて学習される、
ロボット教示方法。
【請求項5】
請求項1に記載のロボット教示方法において、
前記補正モデルは、出力された前記教示点に基づいて学習される、
ロボット教示方法。
【請求項6】
請求項1に記載のロボット教示方法において、
さらに、一つのワークに対する複数の教示点それぞれにおける前記ロボットの動作の類似度に基づき、前記複数の教示点を一又は複数のグループに、前記コンピュータが分類し、
前記コンピュータは、前記一のグループから選択した教示点、又は、前記複数のグループそれぞれから選択した教示点を抽出し、
前記補正モデルは、抽出された前記教示点に基づいて初回学習される、
ロボット教示方法。
【請求項7】
請求項1に記載のロボット教示方法において、
前記コンピュータは、統計的手法により前記類似度を判断する、
ロボット教示方法。
【請求項8】
請求項7に記載のロボット教示方法において、
前記ロボットは、複数の関節を有する多関節ロボットを含み、
前記教示点における前記ロボットの動作は、前記関節の軸値によって表される、
ロボット教示方法。
【請求項9】
請求項8に記載のロボット教示方法において、
前記コンピュータは、前記類似度の判断において、関節の軸値をベクトルにより表す、
ロボット教示方法。
【請求項10】
請求項8に記載のロボット教示方法において、
前記コンピュータは、前記類似度の判断において、関節の軸値を、当該関節の可動範囲によって正規化する、
ロボット教示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボット教示方法、及び、教示システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、従来のオフラインティーチング装置が記載されている。従来のオフラインティーチング装置は、ニューラルネットワークを使って、6軸の垂直多関節ロボットの絶対位置誤差を抑制する。従来のオフラインティーチング装置は、ロボットに与える教示点を、数学モデルにより補正する。従来のオフラインティーチング装置はまた、数学モデルにより補正された教示点をニューラルネットワークに入力することにより、補正された教示点の位置誤差をさらに補正するための補正量を、ニューラルネットワークの出力として取得する。ロボット制御装置は、数学モデルにより補正された教示点を、ニューラルネットワークの出力である補正量によって補正した上で、ロボットを制御する。
【先行技術文献】
【特許文献】
【0003】
特開平6-114769号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットの絶対位置誤差は、主にロボットの個体差に起因する。絶対位置誤差を抑制するために、ロボット毎に、絶対位置誤差が把握される。前述した従来のオフラインティーチング装置に限らず、ロボットのオフライン教示においては一般的に、オペレータは、教示点毎にロボットを実際に動作させることにより、絶対位置誤差を把握する作業を行う。ロボットに与えられる教示点の数が増えるほど、オペレータは、膨大な量の作業を行う。
【0005】
また、ワークの種類が異なれば、ロボットに与えられる教示点が変わる。オペレータは、ワークが新しい種類のワークへ変わる度、又は、新しい種類のワークが追加される度に、教示点毎に絶対位置誤差を把握するための膨大な量の作業を行う。
【課題を解決するための手段】
【0006】
ここに開示する技術は、
絶対位置誤差の補正モデルを使って制御されるロボットがワークに対する作業を行うための複数の教示点であって、オフライン教示により前記ロボットに与えられる教示点を、コンピュータが読み込み、
前記複数の教示点それぞれにおける前記ロボットの動作の類似度に基づき、前記複数の教示点の中から、前記補正モデルによる補正を調整する教示点を、前記コンピュータが抽出し、
抽出した前記教示点を、前記コンピュータが出力する、ロボット教示方法である。
【発明の効果】
【0007】
前記ロボット教示方法は、補正モデルによる補正を調整するための作業量を減らすことができる。
【図面の簡単な説明】
【0008】
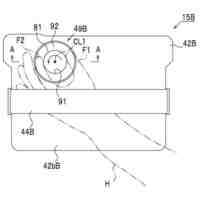
図1は、ロボットの教示システムを示している。
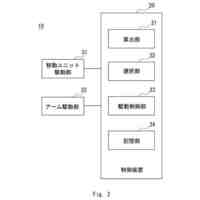
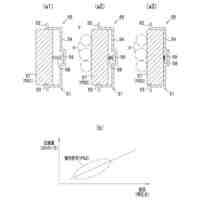
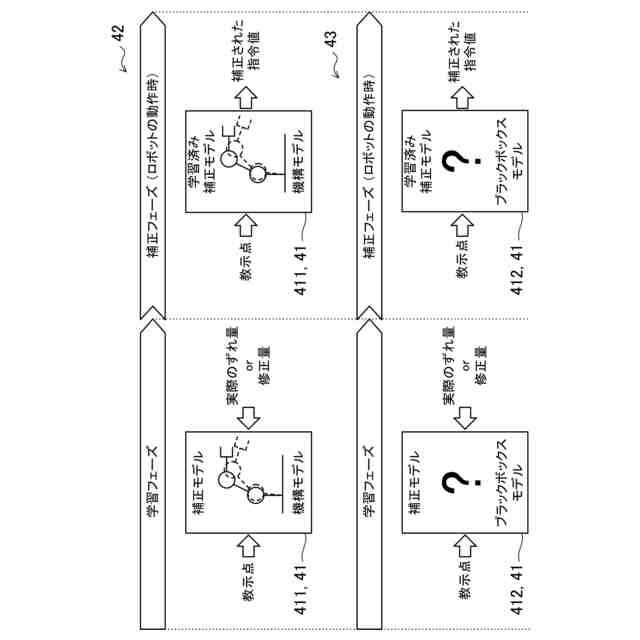
図2の上図は、機構モデルを使った絶対位置誤差の補正の手順を示し、下図は、ブラックボックスモデルを使った絶対位置誤差の補正の手順を示している。
図3は、第2ワークの教示点の中から教示点を抽出する手法を示している。
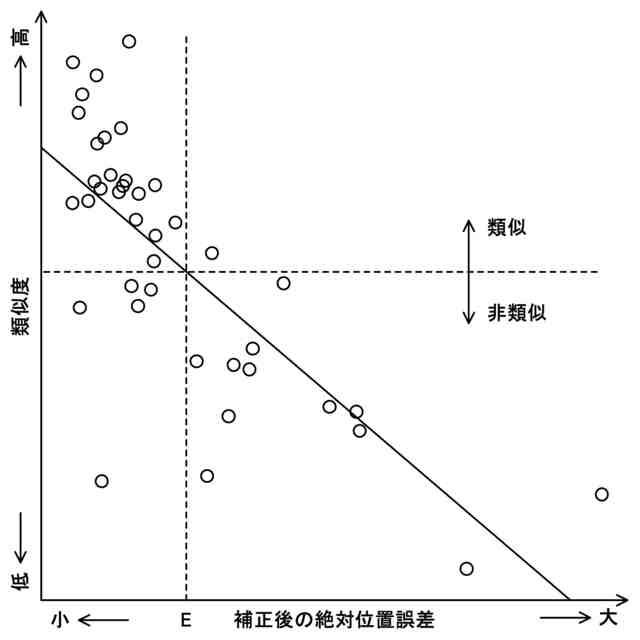
図4は、教示点の類似度と、学習済みの補正モデルを使って制御されたロボットの絶対位置誤差の大きさとの関係を示している。
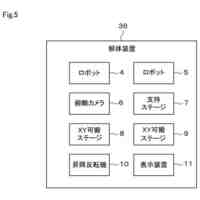
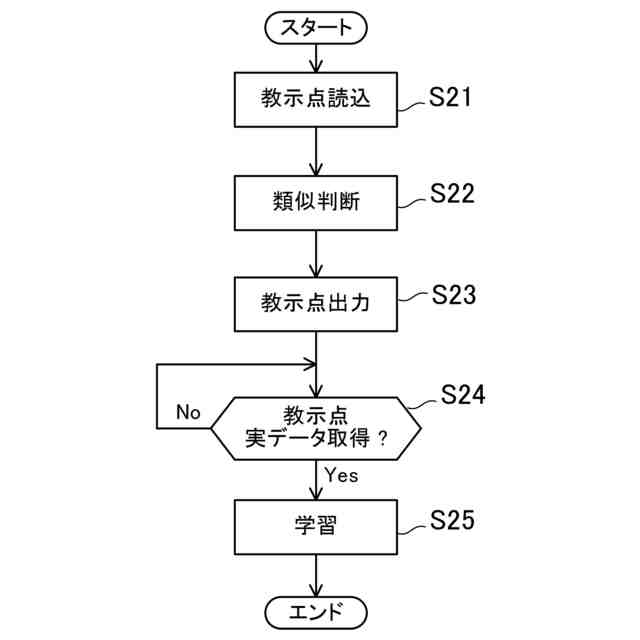
図5は、教示装置が実行する、教示点の抽出に係る手順を示すフローチャートである。
図6は、教示装置及びコントローラが実行する、補正モデルの学習に係る手順を示すフローチャートである。
図7は、学習前後の補正モデルの違いを表すイメージである。
図8は、学習済みの教示点を複数のグループに分類した例を示している。
図9は、補正モデルの初回学習時に、ワークの教示点の中から、学習に供される教示点を抽出する手法を示している。
図10は、類似度を、ロボットの動作と作業に関する情報とに応じて判断する例を示している。
図11は、連続した複数の教示点を含む教示点群の類似度に基づいて、補正モデルの初回学習時に、複数の教示点群の中から、学習に供される教示点群を抽出する手法を示している。
図12は、補正モデルが既に学習されている場合に、新たに与えられた教示点群の中から、補正モデルによる補正を調整する教示点群を抽出する手法を示している。
【発明を実施するための形態】
【0009】
以下、ロボット教示方法及び教示システムの実施形態について、図面を参照しながら説明する。ここで説明するロボット教示方法及び教示システムは例示である。
【0010】
(ロボットの教示システム)
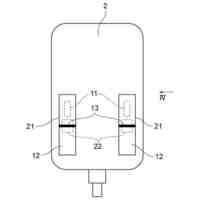
図1は、ロボットの教示システム1を示している。教示システム1は、ロボット2のオフライン教示を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
作業管理システムおよびそれに用いられる情報処理装置
4日前
川崎重工業株式会社
ハンド
25日前
株式会社アイセイ
搬送装置
1か月前
株式会社不二越
ロボット
17日前
個人
けがき用治具
19日前
個人
深孔スリーブ駆動ロッド構造
9日前
株式会社不二越
ロボット操作装置
16日前
川崎重工業株式会社
ロボット
17日前
川崎重工業株式会社
ロボットシステム
25日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
株式会社デンソー
操縦桿
17日前
工機ホールディングス株式会社
作業機
4日前
個人
バール
9日前
梅馨堂合同会社
人協働ロボットシステム
11日前
株式会社不二越
基板搬送用ロボット
26日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
株式会社マキタ
作業機
16日前
学校法人法政大学
装着型アシスト装置
6日前
三菱電機株式会社
トルク締め個所検出システム
9日前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
中国電力株式会社
電動ドライバー
3日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
JUKI株式会社
ハンドリング装置
11日前
不二空機株式会社
エアツール及びエアツールの使用方法
25日前
株式会社デンソー
作業装置および作業プログラム
17日前
株式会社デンソー
解体装置および解体プログラム
17日前
株式会社ベッセル工業
インパクト工具
17日前
株式会社不二越
通信端末装置及びロボット制御システム
1か月前
オムロン株式会社
モバイルロボット
3日前
オムロン株式会社
モバイルロボット
3日前
学校法人 名古屋電気学園
制御システム
23日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ