TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042337
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149286
出願日
2023-09-14
発明の名称
解体装置および解体プログラム
出願人
株式会社デンソー
代理人
弁理士法人サトー
主分類
B25J
13/00 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のロボットを用いて被解体物を解体する場合の作業性を向上させる。
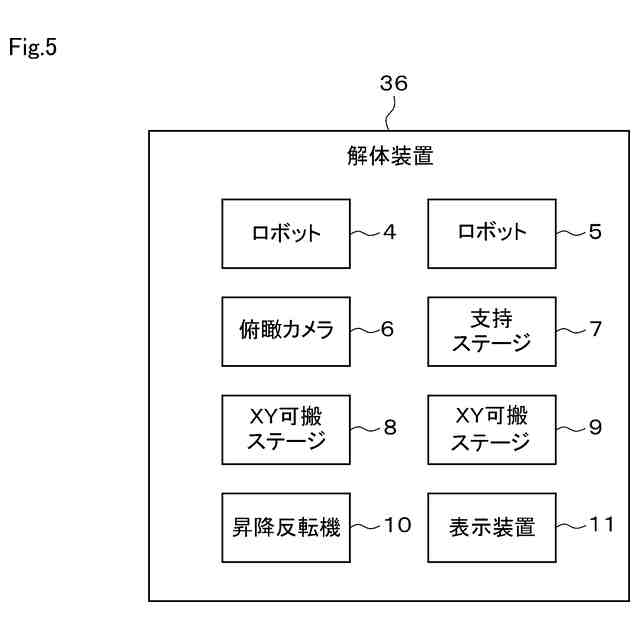
【解決手段】解体装置は、解体の対象とする対象物(2)を解体するものであって、前記対象物を中央側としてその両側からアームを延ばして前記対象物を解体するための各種作業を行う複数のロボット(4、5)と、作業者の所望する位置を含むように撮像範囲を調整可能な撮像装置(6)と、前記撮像装置の撮像範囲の中央部に前記対象物において前記解体のための作業が行われる場所である作業場所が配置されるとともに前記撮像装置の撮像範囲の両側部に前記ロボットのアームが配置されるように前記対象物および前記ロボットのうち少なくとも一方を移動させる移動部(7、8、9、10、20、21)と、前記撮像装置により撮像された画像を表示する表示装置(11)と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
解体の対象とする対象物(2)を解体する解体装置であって、
前記対象物を中央側としてその両側からアームを延ばして前記対象物を解体するための各種作業を行う複数のロボット(4、5)と、
作業者の所望する位置を含むように撮像範囲を調整可能な撮像装置(6)と、
前記撮像装置の撮像範囲の中央部に前記対象物において前記解体のための作業が行われる場所である作業場所が配置されるとともに前記撮像装置の撮像範囲の両側部に前記ロボットのアームが配置されるように前記対象物および前記ロボットのうち少なくとも一方を移動させる移動部(7、8、9、10、20、21)と、
前記撮像装置により撮像された画像を表示する表示装置(11)と、
を備える解体装置。
続きを表示(約 1,500 文字)
【請求項2】
前記撮像装置を第1撮像装置とすると、
前記第1撮像装置とは別体である、前記ロボットに搭載され且つ前記ロボットのアーム先端側を撮像する第2撮像装置(13、14)を備え、
前記表示装置には、前記第1撮像装置により撮像された画像である第1画像に加え、前記第2撮像装置により撮像された画像である第2画像が表示される請求項1に記載の解体装置。
【請求項3】
さらに、前記第1撮像装置および前記第2撮像装置により撮像された複数の画像を用いて、前記複数の画像のそれぞれに比べて視認性の高い画像である第3画像を生成する画像生成部(24)を備え、
前記表示装置には、前記第1画像および前記第2画像に代えて、または、前記第1画像および前記第2画像に加えて前記第3画像が表示される請求項2に記載の解体装置。
【請求項4】
さらに、前記表示装置に前記第1画像および前記第2画像が表示される状態と、前記表示装置に前記第3画像が表示される状態と、を切り替える表示切替部(24)を備える請求項3に記載の解体装置。
【請求項5】
前記対象物は、前記ロボットのアームよりも大きい物体である請求項1から4のいずれか一項に記載の解体装置。
【請求項6】
解体の対象とする対象物(2)を中央側としてその両側からアームを延ばして前記対象物を解体するための各種作業を行う複数のロボット(4、5)を用いて前記対象物を解体するための解体プログラムであって、
プロセッサに、
作業者の所望する位置を含むように撮像装置(6)の撮像範囲を調整する調整手順と、
前記撮像装置の撮像範囲の中央部に前記対象物において前記解体のための作業が行われる場所である作業場所が配置されるとともに前記撮像装置の撮像範囲の両側部に前記ロボットのアームが配置されるように前記対象物および前記ロボットのうち少なくとも一方を移動させる移動手順と、
前記撮像装置により撮像された画像を表示装置(11)に表示する表示手順と、
を実行させる解体プログラム。
【請求項7】
前記撮像装置を第1撮像装置とすると、
前記表示手順では、前記第1撮像装置により撮像された画像である第1画像に加え、前記第1撮像装置とは別体である、前記ロボットに搭載され且つ前記ロボットのアーム先端側を撮像する第2撮像装置(13、14)により撮像された画像である第2画像を前記表示装置に表示する請求項6に記載の解体プログラム。
【請求項8】
前記プロセッサに、
さらに、前記第1撮像装置および前記第2撮像装置により撮像された複数の画像を用いて、前記複数の画像のそれぞれに比べて視認性の高い画像である第3画像を生成する画像生成手順を実行させ、
前記表示手順では、前記第1画像および前記第2画像に代えて、または、前記第1画像および前記第2画像に加えて前記第3画像を前記表示装置に表示する請求項7に記載の解体プログラム。
【請求項9】
前記プロセッサに、
さらに、前記表示装置に前記第1画像および前記第2画像が表示される状態と、前記表示装置に前記第3画像が表示される状態と、を切り替える表示切替手順を実行させる請求項8に記載の解体プログラム。
【請求項10】
前記対象物は、前記ロボットのアームよりも大きい物体である請求項6から9のいずれか一項に記載の解体プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、解体の対象とする対象物を解体する解体装置および解体プログラムに関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
廃棄自動車など構造が複雑であり且つ重量が比較的重いものを解体するシステムでは、作業者が例えば重機などの解体機を操作して解体の作業を行うオペレータ作業が行われる。このようなオペレータ作業においては、操縦席にいる作業者から作業場所が見え難くなるという課題、解体機と自動車との位置関係が変化して作業が困難になるという課題などがある。言い換えると、上記オペレータ作業においては、作業場所の視認性を向上すること、作業性を向上することなどが要求されることになる。
【0003】
特許文献1には、1台の解体機と、解体機を動かすためのターンテーブルと、解体する廃棄自動車の作業場所と解体機の先端アタッチメントとを撮影するビデオカメラと、ビデオカメラの映像を映し出すモニタと、を備えた解体システムが開示されている。以下、特許文献1に開示される技術のことを従来技術と称することとする。従来技術によれば、解体機の先端アタッチメントの位置または姿勢を、常に廃棄自動車と視座の位置に対して作業し易い適切な位置または姿勢に保つことができ、作業場所の見え方を改善することができる。
【先行技術文献】
【特許文献】
【0004】
特開2020-032320号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記したような解体システムにおいて、解体機として2つのロボットを用い、それら2つのロボットを同期して動作させることにより作業性を向上させることが考えられる。1人の作業者により2つのロボットを同期して無理なく安全に操作して作業性を向上させるためには、作業者が、被解体物と2つのロボットとの間における位置関係を常に認識する必要がある。従来技術は、解体機が1つである場合を前提として、作業場所の見え方を改善させるものであるため、解体機が2つである場合には適用することはできない。
【0006】
本発明は上記事情に鑑みてなされたものであり、その目的は、複数のロボットを用いて被解体物を解体する場合の作業性を向上させることができる解体装置および解体プログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様による解体装置は、解体の対象とする対象物(2)を解体するものであって、前記対象物を中央側としてその両側からアームを延ばして前記対象物を解体するための各種作業を行う複数のロボット(4、5)と、作業者の所望する位置を含むように撮像範囲を調整可能な撮像装置(6)と、前記撮像装置の撮像範囲の中央部に前記対象物において前記解体のための作業が行われる場所である作業場所が配置されるとともに前記撮像装置の撮像範囲の両側部に前記ロボットのアームが配置されるように前記対象物および前記ロボットのうち少なくとも一方を移動させる移動部(7、8、9、10、20、21)と、前記撮像装置により撮像された画像を表示する表示装置(11)と、を備える。
【0008】
本開示の一態様による解体プログラムは、解体の対象とする対象物(2)を中央側としてその両側からアームを延ばして前記対象物を解体するための各種作業を行う複数のロボット(4、5)を用いて前記対象物を解体するためのものであって、プロセッサに、作業者の所望する位置を含むように撮像装置(6)の撮像範囲を調整する調整手順と、前記撮像装置の撮像範囲の中央部に前記対象物において前記解体のための作業が行われる場所である作業場所が配置されるとともに前記撮像装置の撮像範囲の両側部に前記ロボットのアームが配置されるように前記対象物および前記ロボットのうち少なくとも一方を移動させる移動手順と、前記撮像装置により撮像された画像を表示装置(11)に表示する表示手順と、を実行させる。
【0009】
上記構成によれば、作業者が対象物において作業を行う場所である作業場所を含むように撮像装置の撮像範囲が調整されると、表示装置に表示される画像が、実際の対象物と複数のロボットのアームとの位置関係と同様になる。そのため、作業者は、表示装置に表示される画像を見ることにより、対象物と解体のための各種作業を行う複数のロボットのアームとの位置関係を直感的に把握することが可能となる。この結果、解体の作業性が向上される。
【図面の簡単な説明】
【0010】
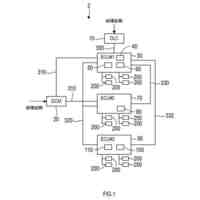
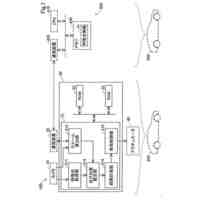
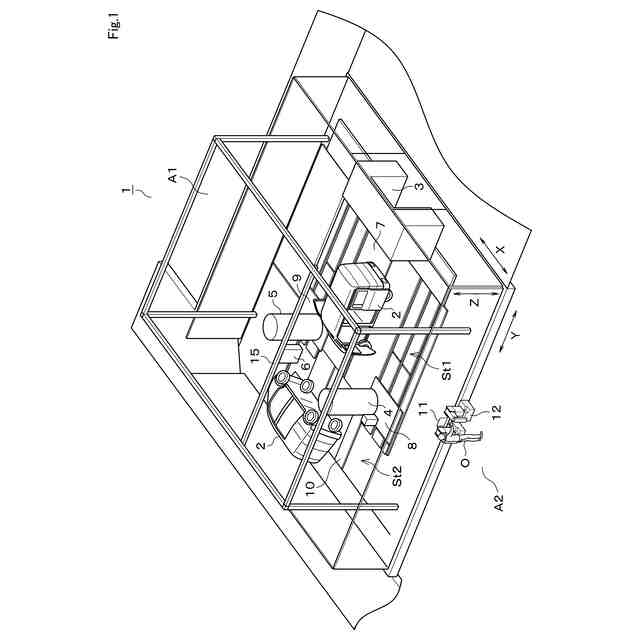
第1実施形態に係る解体システムの構成を模式的に示す図
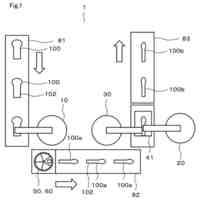
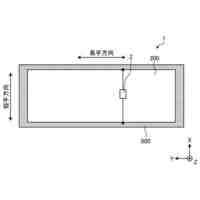
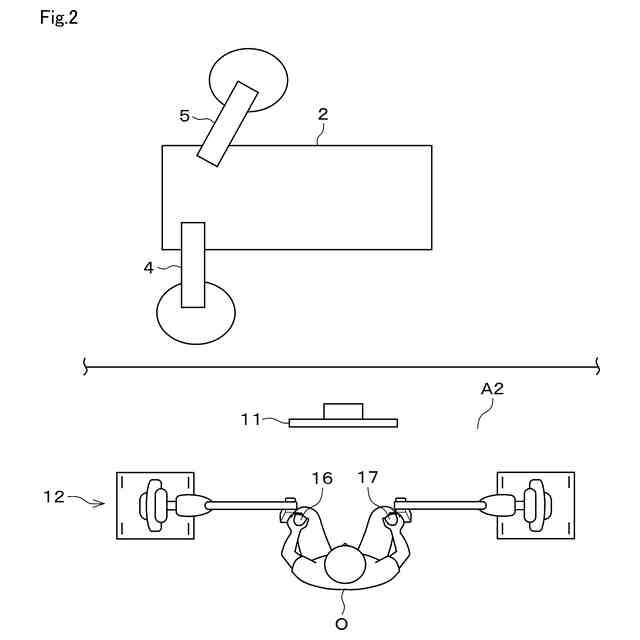
第1実施形態に係る解体システムが備える構成の一部の配置を示す図
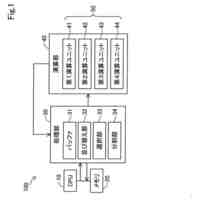
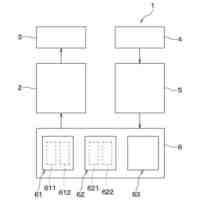
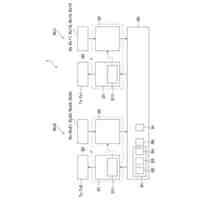
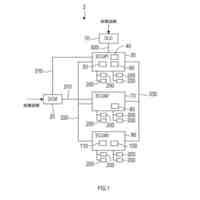
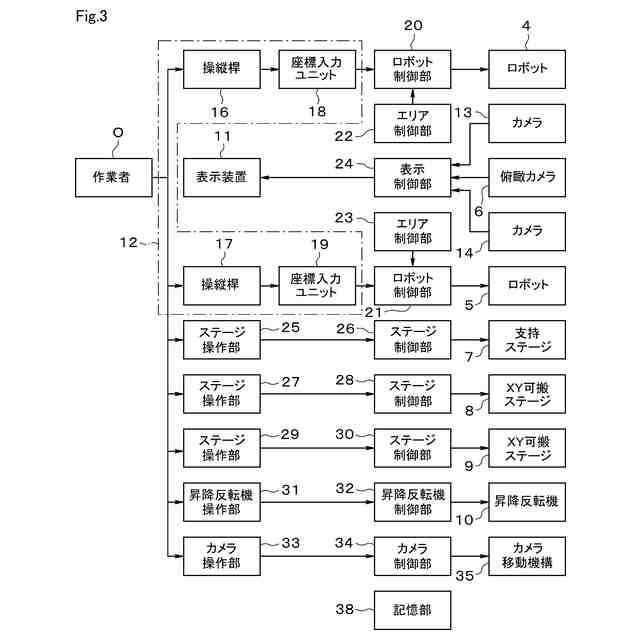
第1実施形態に係る解体システムが備える構成を機能ブロックとして示す図
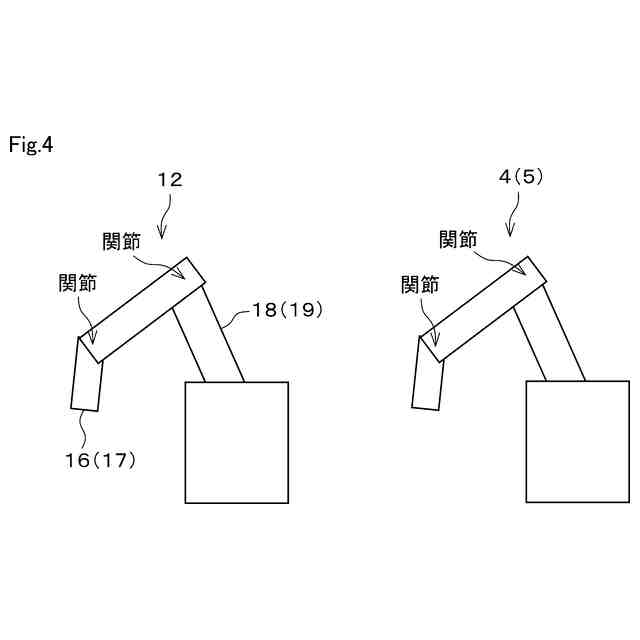
第1実施形態に係る2つ以上の関節を含む操作装置とロボットの構成例を模式的に示す図
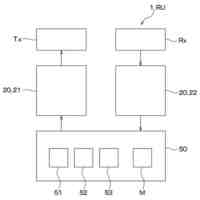
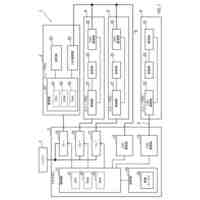
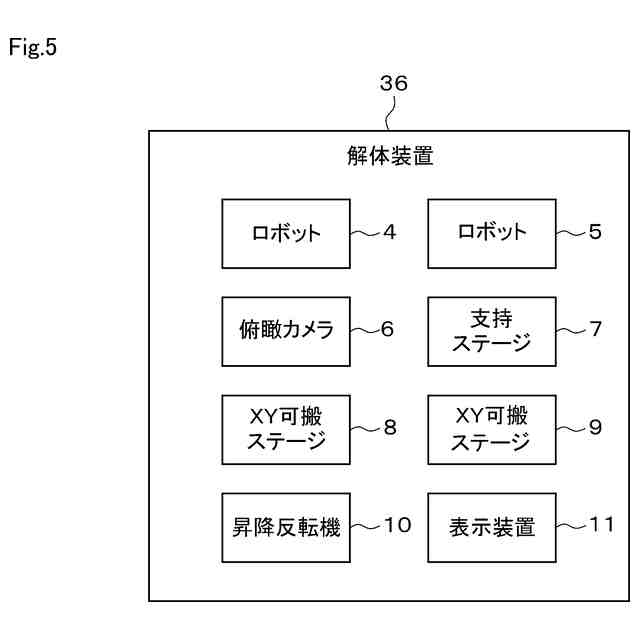
第1実施形態に係る解体装置が備える構成を機能ブロックとして示す図
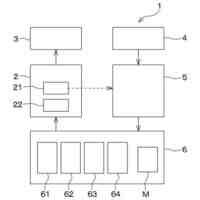
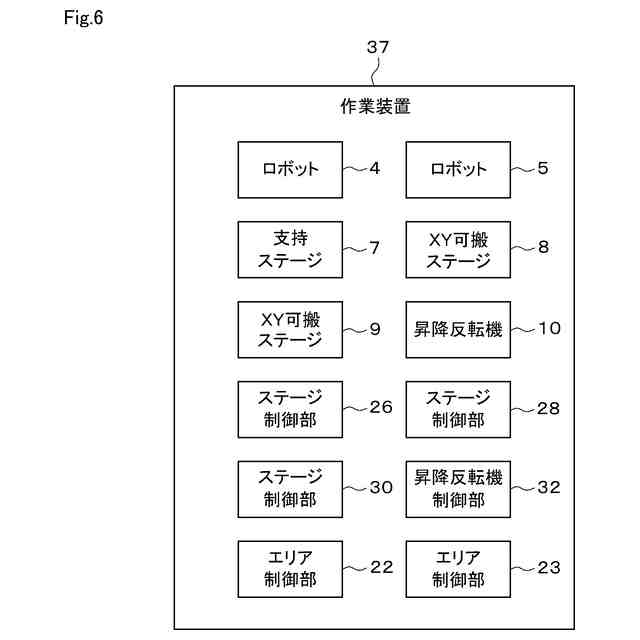
第1実施形態に係る作業装置が備える構成を機能ブロックとして示す図
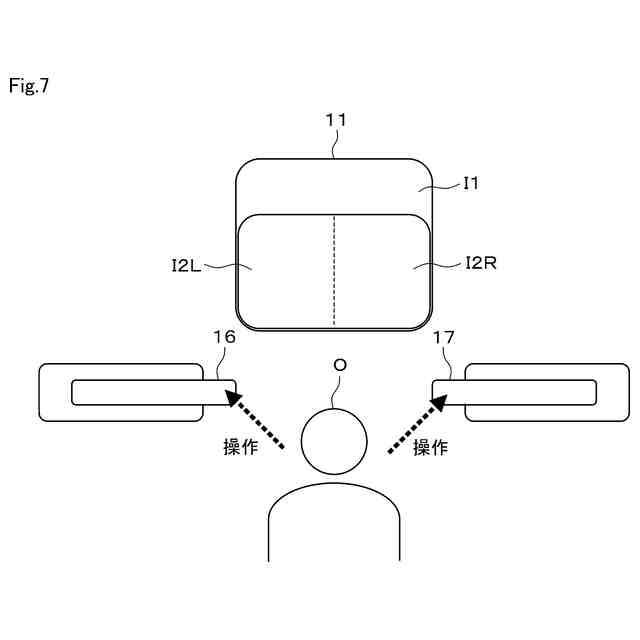
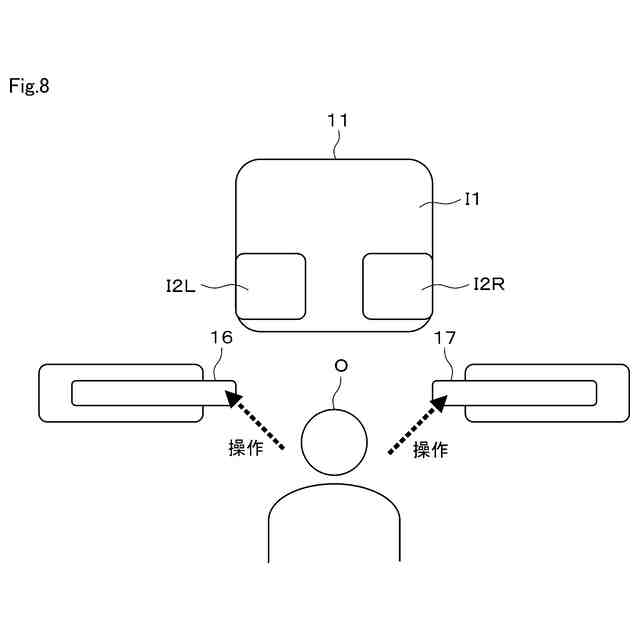
第1実施形態に係る遠隔操作エリアに設けられる各構成の配置を模式的に示すとともに表示装置による表示の第1表示例を示す図
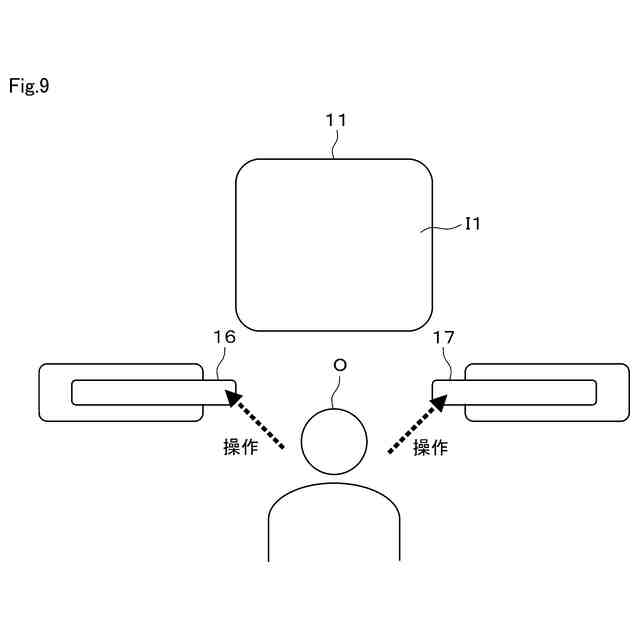
第1実施形態に係る遠隔操作エリアに設けられる各構成の配置を模式的に示すとともに表示装置による表示の第2表示例を示す図
第1実施形態に係る遠隔操作エリアに設けられる各構成の配置を模式的に示すとともに表示装置による表示の第3表示例を示す図
第1実施形態に係る遠隔操作エリアに設けられる各構成の配置を模式的に示すとともに表示装置による表示の第4表示例を示す図
第1実施形態に係る俯瞰カメラにより撮像された第1画像の一例を模式的に示す図
第1実施形態に係る3Dカメラにより撮像された第2画像の一例を模式的に示す図
第1実施形態に係る3Dカメラにより撮像された第2画像の一例を模式的に示す図
第1実施形態に係る第1画像と第2画像とを合成するなどして生成された第3画像の一例を模式的に示す図
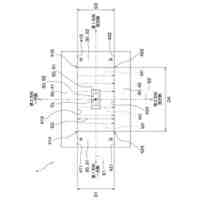
第1実施形態に係る解体ステーションSt1における俯瞰カメラおよび3Dカメラからの各視野を説明するための図
第1実施形態に係る解体ステーションSt2における俯瞰カメラおよび3Dカメラからの各視野を説明するための図
第1実施形態に係る動作許可エリアの設定方法を説明するための図
第1実施形態に係るロボットの可動域および動作許可エリアを模式的に示す平面図であるとともに動作許可エリアの第1設定例を示す図
第1実施形態に係るロボットの動作許可エリアを模式的に示す斜視図であるとともに動作許可エリアの第2設定例を示す図
第1実施形態に係るロボットの可動域および動作許可エリアを模式的に示す平面図であるとともに動作許可エリアの第3設定例を示す図
第1実施形態に係る複数のロボットの協調動作が必要になる理由を説明するための図
第1実施形態および比較例に係る複数のロボットを協調動作させて所定の作業を行う場合に作業が可能になる例と作業が不可能になる例とを説明するための図
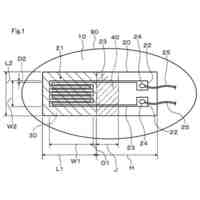
第1実施形態に係るツールがロボットに取り付けられた状態を模式的に示す図
第1実施形態に係る操縦桿を作業者が把持した状態の構成を模式的に示す斜視図
第1実施形態に係る操縦桿を作業者が把持した状態および座標入力ユニットの構成を模式的に示す斜視図
第1実施形態に係る操縦桿の構成を模式的に示す斜視図
第1実施形態に係る操縦桿の構成を模式的に示す斜視図
第1実施形態に係る操縦桿の構成を模式的に示す側面図
第1実施形態に係る操縦桿の構成を模式的に示す正面図
第1実施形態に係る操縦桿を作業者が把持した状態の構成を模式的に示す図
第1実施形態に係る操縦桿を作業者が把持した状態の構成を模式的に示す図
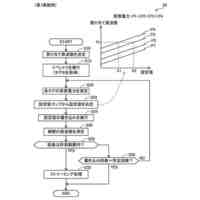
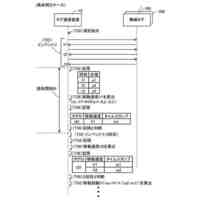
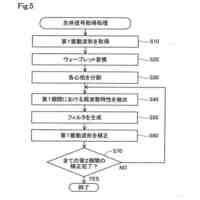
第1実施形態に係る解体プログラムが実行されることにより実施される各処理の流れを表す第1処理フロー例を示す図
第1実施形態に係る解体プログラムが実行されることにより実施される各処理の流れを表す第2処理フロー例を示す図
第1実施形態に係る作業プログラムが実行されることにより実施される各処理の流れを表す第1処理フロー例を示す図
第1実施形態に係る作業プログラムが実行されることにより実施される各処理の流れを表す第2処理フロー例を示す図
第1実施形態に係る作業プログラムが実行されることにより実施される各処理の流れを表す第3処理フロー例を示す図
第2実施形態に係るロボットの可動域および動作許可エリアを模式的に示す平面図であるとともに動作許可エリアの設定例を示す図
第2実施形態に係る作業者が対象物を目視するシステムにおける各構成の具体的な第1配置例を示す図
第2実施形態に係る作業者が対象物を目視するシステムにおける各構成の具体的な第2配置例を示す図
第2実施形態に係る作業者が対象物を目視するシステムにおける各構成の具体的な第3配置例を示す図
第3実施形態に係る操縦桿の構成を模式的に示す斜視図
変形例に係るジェスチャーに応じた入力を行う操作部を説明するための図
変形例に係るジェスチャーに応じた入力を行う操作部を説明するための図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
4日前
株式会社デンソー
モータ
17日前
株式会社デンソー
演算装置
3日前
株式会社デンソー
回転電機
18日前
株式会社デンソー
試験装置
13日前
株式会社デンソー
電池装置
11日前
株式会社デンソー
診断装置
3日前
株式会社デンソー
レーダ装置
17日前
株式会社デンソー
半導体装置
13日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
レーダ装置
4日前
株式会社デンソー
慣性センサ
10日前
株式会社デンソー
半導体装置
3日前
株式会社デンソーウェーブ
タグ通信装置
18日前
株式会社デンソー
通信システム
18日前
株式会社デンソーウェーブ
タグ通信装置
3日前
株式会社デンソー
通信システム
18日前
株式会社デンソー
通信システム
19日前
株式会社デンソーウェーブ
光学情報読取装置
3日前
株式会社デンソーウェーブ
ロボットシステム
19日前
株式会社デンソー
自己位置推定装置
20日前
株式会社デンソーテン
スロットアンテナ
12日前
株式会社デンソー
路面摩擦推定装置
18日前
株式会社デンソー
回転角度検出装置
11日前
株式会社デンソー
二酸化炭素回収装置
12日前
株式会社デンソーウェーブ
歪ゲージの取付方法
18日前
株式会社デンソーウェーブ
データ配信システム
17日前
株式会社デンソーウェーブ
移動体追跡システム
20日前
株式会社デンソーウェーブ
ロボット制御システム
16日前
株式会社デンソー
酸性ガス回収システム
5日前
株式会社デンソートリム
エンジン電子制御装置
18日前
株式会社デンソー
シャント式電流センサ
19日前
株式会社デンソー
生体信号検出システム
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ