TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054015
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023163183
出願日
2023-09-26
発明の名称
移動体追跡システム
出願人
株式会社デンソーウェーブ
,
株式会社日建設計
代理人
個人
,
個人
主分類
G01S
17/66 20060101AFI20250331BHJP(測定;試験)
要約
【課題】検出物体の特徴情報を取得することなく、移動体の移動経路を追跡可能な構成を提供する。
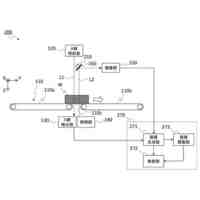
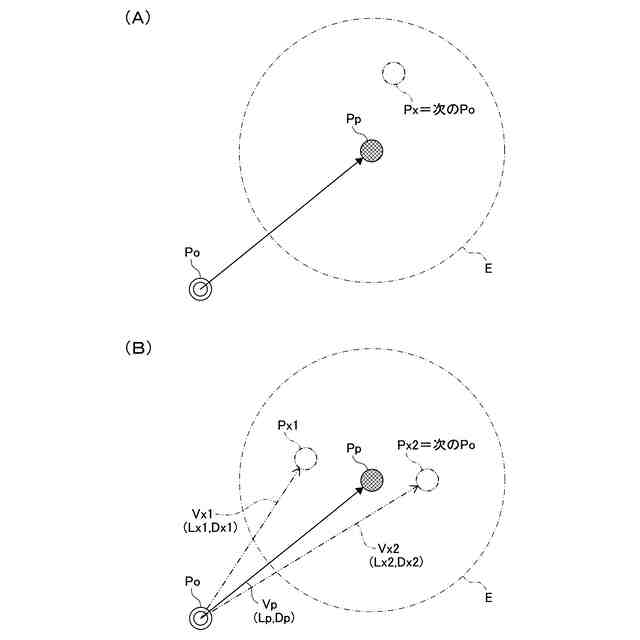
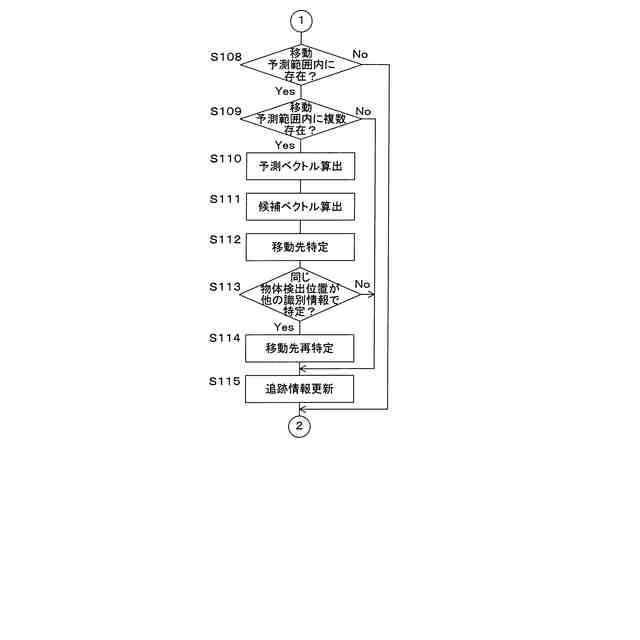
【解決手段】移動体の追跡位置情報が識別情報及び検出タイミングに関連付けられて追跡情報リストに登録される。また、追跡情報リストを利用して移動体が次に移動する移動先が識別情報ごとに移動予測位置として予測され、移動予測位置情報が識別情報に関連付けられて追跡情報リストに登録される。そして、物体検出位置が移動予測位置情報に応じて設定される移動予測範囲E内に含まれることで移動体が特定されて、当該物体検出位置に関する情報が移動予測位置情報と同じ識別情報に関連付けられる追跡位置情報として追跡情報リストに登録される。
【選択図】図3
特許請求の範囲
【請求項1】
所定の監視エリア内に入った移動体を追跡する移動体追跡システムであって、
前記所定の監視エリア内に向けた投光に応じて当該所定の監視エリア内の移動体を含めた物体からの反射光を受光することで前記物体の位置を物体検出位置として検出する検出部と、
移動体の追跡位置に関する追跡位置情報が他の移動体と区別するための識別情報及び検出タイミングに関連付けられて登録される追跡情報リストを有する記憶部と、
前記追跡情報リストを利用して前記移動体が次に移動する移動先を前記識別情報ごとに移動予測位置として予測し、当該移動予測位置に関する移動予測位置情報を前記識別情報に関連付けて前記追跡情報リストに登録する予測部と、
前記物体検出位置が前記移動予測位置情報に応じて設定される移動予測範囲内に含まれることで移動体を特定して、当該物体検出位置に関する情報を前記移動予測位置情報と同じ前記識別情報に関連付けられる前記追跡位置情報として前記追跡情報リストに登録する特定部と、
前記追跡情報リストに登録される情報に基づいて前記所定の監視エリア内での移動体の移動を追跡する追跡部と、
を備えることを特徴とする移動体追跡システム。
続きを表示(約 1,000 文字)
【請求項2】
前記特定部は、1つの前記移動予測範囲内に前記物体検出位置が複数含まれる場合に、前記移動予測範囲の予測元となる前記追跡位置を始点とする前記物体検出位置までの候補ベクトルをそれぞれ算出するとともに同じ前記追跡位置を始点とする前記移動予測位置まで予測ベクトルを算出して、複数の前記候補ベクトルのうち前記予測ベクトルに最も類似する候補ベクトルの前記物体検出位置に関する情報を前記追跡位置情報として前記追跡情報リストに登録することを特徴とする請求項1に記載の移動体追跡システム。
【請求項3】
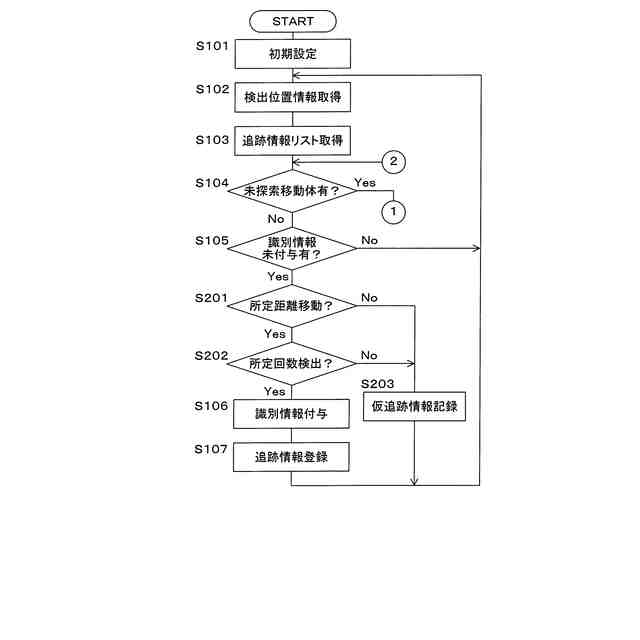
前記記憶部は、前記移動予測範囲内に含まれない前記物体検出位置が仮追跡位置として登録される仮追跡情報リストを有し、
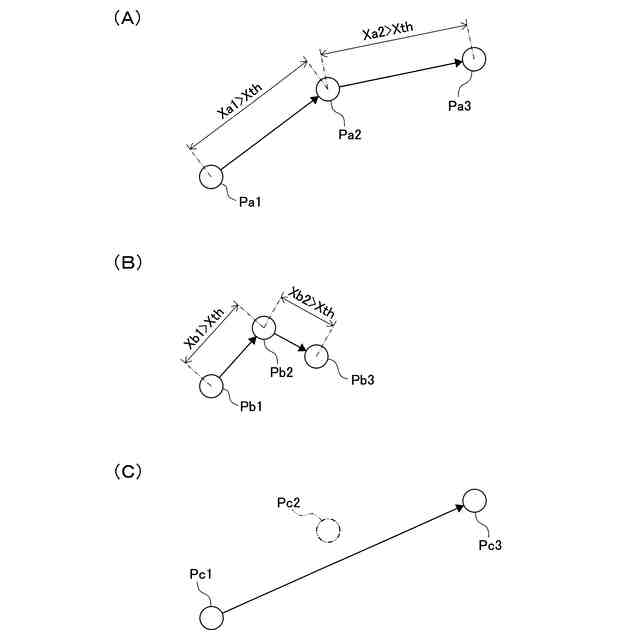
前記物体検出位置が前回登録された仮追跡位置から所定距離離れているとの判定が同じ物体について所定回数なされることで、当該物体検出位置に関する情報を前記追跡位置情報として新たに付与した前記識別情報に関連付けて前記追跡情報リストに登録する識別情報付与部を備えることを特徴とする請求項1に記載の移動体追跡システム。
【請求項4】
前記物体検出位置と前記移動予測範囲との関係に基づいて、移動中と判定される前記識別情報に対して移動中フラグを設定して停止中と判定される前記識別情報に対して停止中フラグを設定するためのフラグ設定部と、
一定期間継続して前記停止中フラグが設定される前記識別情報を関連付けられる情報とともに前記追跡情報リストから削除する削除部と、
を備えることを特徴とする請求項1に記載の移動体追跡システム。
【請求項5】
前記物体検出位置と前記移動予測範囲との関係に基づいて、移動中と判定される前記識別情報に対して移動中フラグを設定して停止中と判定される前記識別情報に対して停止中フラグを設定するためのフラグ設定部と、
一定期間継続して前記停止中フラグが設定される前記識別情報を関連付けられる情報とともに前記追跡情報リストから削除する削除部と、
前記識別情報付与部により新たに付与された前記識別情報の数と前記フラグ設定部によって前記停止中フラグが設定されている前記識別情報の数とを利用して前記所定の監視エリア内に入った前記移動体の総数を算出する総数算出部と、
を備えることを特徴とする請求項3に記載の移動体追跡システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の監視エリア内に入った移動体の移動経路を追跡して取得する移動体追跡システムに関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、所定の監視エリア内に入った移動体の移動経路を追跡して取得する移動体追跡システムとして、例えば、下記特許文献1に開示される入退管理システムが知られている。この入退管理システムでは、管理対象となる出入口にICカードリーダとカメラとが配置されており、ICカードリーダによる読取結果とカメラからの画像データとに基づいて、ICカードを読み取らせた利用者の移動経路が出入口を通過する経路と異なるか否かについて判定するようにして、利用者の入退管理に関する制御が行われる。
【先行技術文献】
【特許文献】
【0003】
特開2017-037447号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のように移動体を追跡するためには、今回検出された物体と前回検出された物体とが同一の個体であることを把握する必要がある。上述のようにカメラを用いて監視エリアを撮像するシステムでは、検出された物体の色や寸法を特徴情報として取得し、類似する色や寸法の物体を同一の個体として捉えることで、移動体が前回検出された物体の位置から今回検出された物体の位置へと移動したと判断することができる。
【0005】
物体からの反射光を受光することでその物体の位置などを検出するLiDAR等を利用した移動体追跡システムでも、移動体の前回の位置と次回の位置とが検出されることで、その移動体の移動経路を追跡することができる。
【0006】
しかしながら、LiDAR等では、検出された物体の色や寸法などの特徴情報を取得することが困難であるため、今回検出された物体と前回検出された物体とが同一の個体であることを正確に把握できない場合がある。このため、例えば、最も近くで検出された検出位置を次の移動先とするように移動体を追跡していると、2つの移動体が一時的に近接したことで追跡すべき検出位置を取り違えてしまうなど、正確に移動体を追跡できなくなる場合がある。
【0007】
本発明は、上述した課題を解決するためになされたものであり、その目的とするところは、検出物体の特徴情報を取得することなく、移動体の移動経路を追跡可能な構成を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明は、
所定の監視エリア(S)内に入った移動体を追跡する移動体追跡システム(1)であって、
前記所定の監視エリア内に向けた投光に応じて当該所定の監視エリア内の移動体を含めた物体からの反射光を受光することで前記物体の位置を物体検出位置(Px)として検出する検出部(10)と、
移動体の追跡位置(Po)に関する追跡位置情報が他の移動体と区別するための識別情報及び検出タイミングに関連付けられて登録される追跡情報リストを有する記憶部(22)と、
前記追跡情報リストを利用して前記移動体が次に移動する移動先を前記識別情報ごとに移動予測位置(Pp)として予測し、当該移動予測位置に関する移動予測位置情報を前記識別情報に関連付けて前記追跡情報リストに登録する予測部(21)と、
前記物体検出位置が前記移動予測位置情報に応じて設定される移動予測範囲(E)内に含まれることで移動体を特定して、当該物体検出位置に関する情報を前記移動予測位置情報と同じ前記識別情報に関連付けられる前記追跡位置情報として前記追跡情報リストに登録する特定部(21)と、
前記追跡情報リストに登録される情報に基づいて前記所定の監視エリア内での移動体の移動を追跡する追跡部(21)と、
を備えることを特徴とする。
なお、上記各括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0009】
本発明では、移動体の追跡位置情報が識別情報及び検出タイミングに関連付けられて追跡情報リストに登録される。予測部は、追跡情報リストを利用して移動体が次に移動する移動先を識別情報ごとに移動予測位置として予測し、移動予測位置情報を識別情報に関連付けて追跡情報リストに登録する。特定部は、物体検出位置が移動予測位置情報に応じて設定される移動予測範囲内に含まれることで移動体を特定して、当該物体検出位置に関する情報を移動予測位置情報と同じ識別情報に関連付けられる追跡位置情報として追跡情報リストに登録する。
【0010】
これにより、追跡情報リストに登録される情報、すなわち、前回以前の移動体の追跡位置から予測される移動予測範囲に基づいて次の移動先となる物体検出位置を特定できるので、検出物体の色や寸法などの特徴情報を取得することなく、移動体の移動経路を追跡することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
通電検査装置
25日前
個人
粒子分析装置
4日前
個人
アクセサリー型テスター
5日前
日本精機株式会社
位置検出装置
21日前
東レ株式会社
シート状物の検査方法
19日前
株式会社ハシマ
検針機
24日前
エイブリック株式会社
電流検出回路
18日前
株式会社テイエルブイ
振動検出装置
4日前
栄進化学株式会社
浸透探傷用濃縮液
11日前
株式会社ミツトヨ
画像測定機
6日前
株式会社チノー
放射光測温装置
18日前
ダイハツ工業株式会社
試料セル
4日前
東ソー株式会社
自動分析装置及び方法
21日前
株式会社 キョーワ
食品搬送装置
18日前
日本特殊陶業株式会社
ガスセンサ
18日前
大和製衡株式会社
計量装置
11日前
日本特殊陶業株式会社
ガスセンサ
18日前
トヨタ自動車株式会社
電気自動車
5日前
理研計器株式会社
ガス検出器
6日前
理研計器株式会社
ガス検出器
6日前
日本碍子株式会社
ガスセンサ
18日前
株式会社熊谷組
計測システム
11日前
理研計器株式会社
ガス検出器
6日前
富士電機株式会社
エンコーダ
19日前
東ソー株式会社
簡易型液体クロマトグラフ
今日
大成建設株式会社
画像表示システム
14日前
理研計器株式会社
ガス検出器
6日前
理研計器株式会社
ガス検出器
6日前
株式会社 システムスクエア
検査装置
12日前
株式会社ニコン
検出装置
4日前
東洋計器株式会社
超音波式流量計
11日前
東洋計器株式会社
超音波式流量計
11日前
株式会社デンソー
試験装置
14日前
東洋計器株式会社
超音波式流量計
11日前
TDK株式会社
温度センサ
19日前
株式会社ヨコオ
シートコンタクタ
21日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ