TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064987
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2024161494
出願日
2024-09-18
発明の名称
計測システム
出願人
株式会社熊谷組
代理人
個人
,
個人
主分類
G01S
5/30 20060101AFI20250410BHJP(測定;試験)
要約
【課題】適切に移動体の位置及び姿勢を計測する。
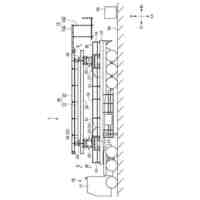
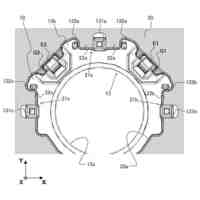
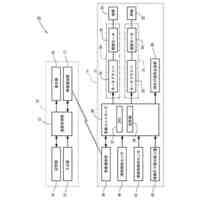
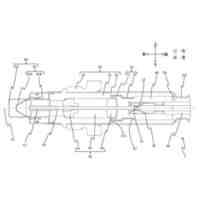
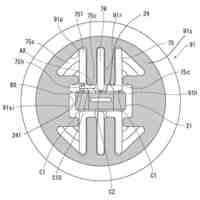
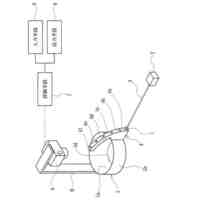
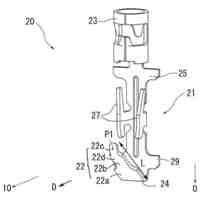
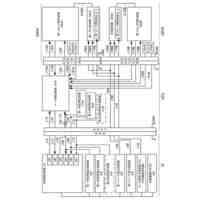
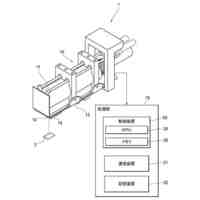
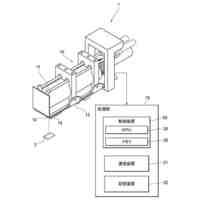
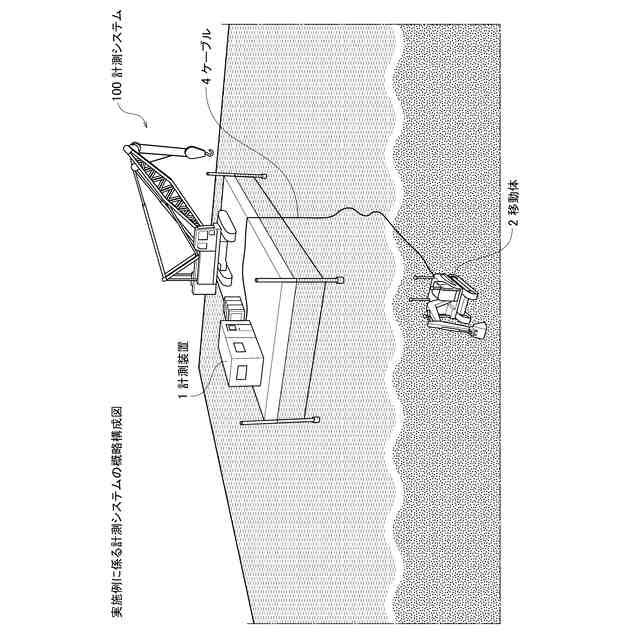
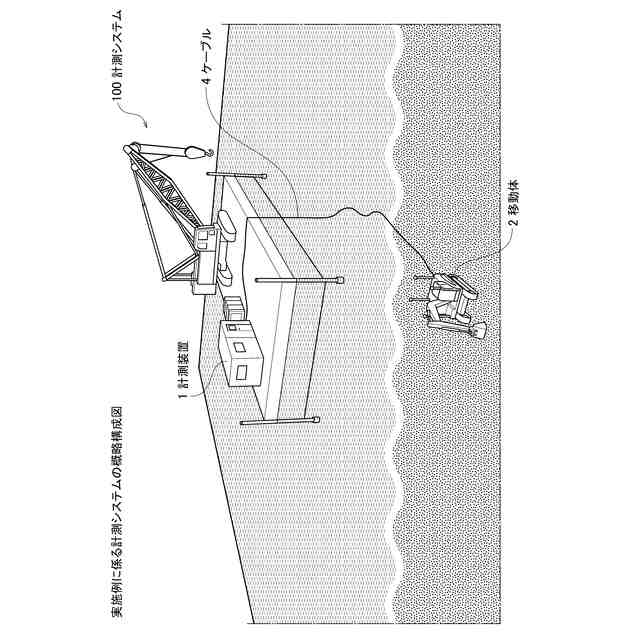
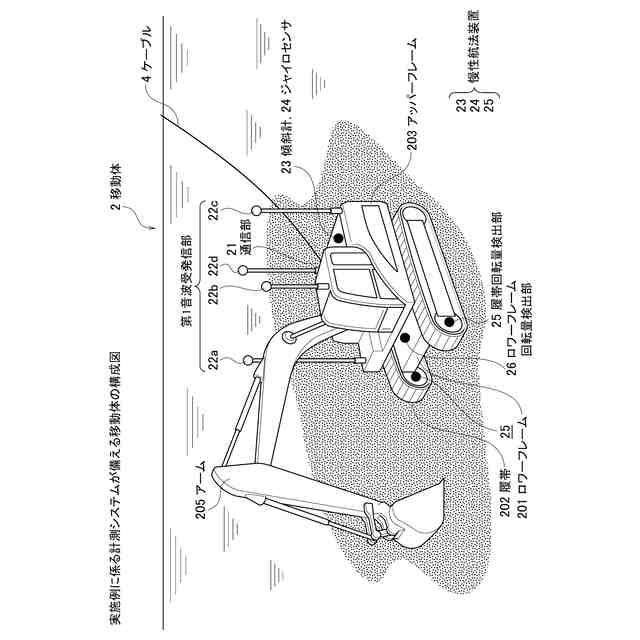
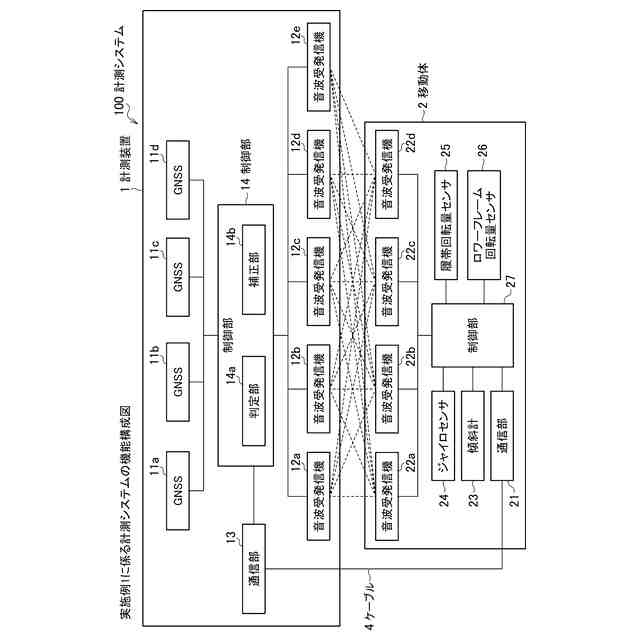
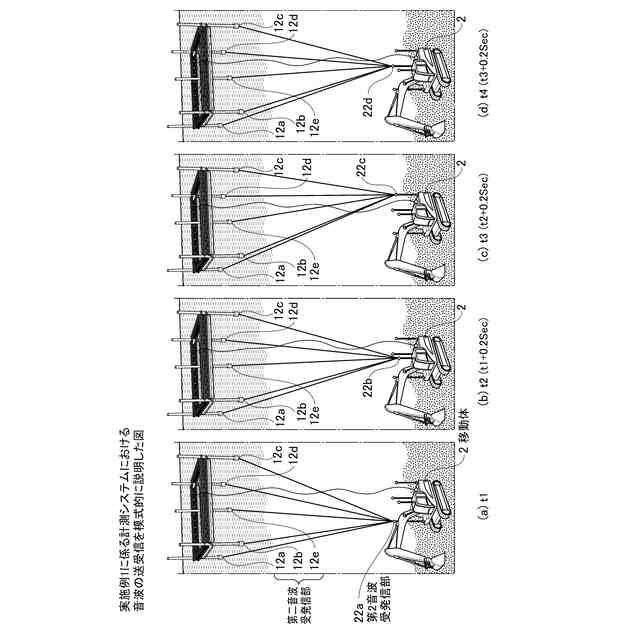
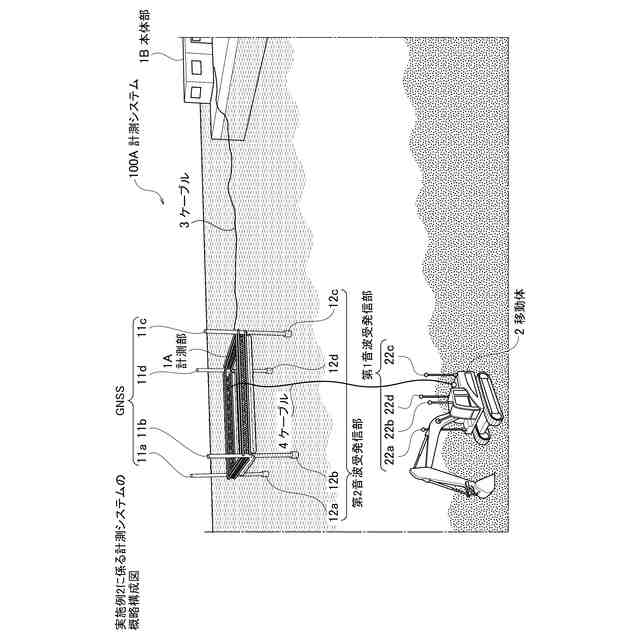
【解決手段】水中を移動する移動体2と、移動体2の計測を行う計測装置1とを備えた計測システム100であって、移動体2は、移動体2の移動量、移動方向、および姿勢のうち少なくとも1つを状態として検出する慣性航法装置と、計測装置1に対して音波を受信または発信する第1音波受発信部22a~22dと、を備え、計測装置1は、GNSSにより座標値を取得するGNSS(符号;11a)~GNSS(符号;11d)と、移動体に対して音波を受信または発信する複数の第2音波受発信部12a~12eと、を備え、GNSSにより取得された座標値と、第1音波受発信部22a~22dまたは第2音波受発信部12a~12eにより受信した音波とに基づいて、慣性航法装置により検出された状態を補正する14bと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
水中を移動する移動体と、前記移動体の計測を行う計測装置とを備えた計測システムであって、
前記移動体は、
前記移動体の移動量、移動方向、および姿勢のうち少なくとも1つを状態として検出する状態検出部と、
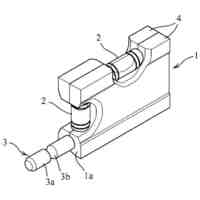
前記移動体上部に所定の間隔を空けて設けられ、前記計測装置に対して音波を受信または発信する複数の第1音波受発信部と、を備え、
前記計測装置は、
前記計測装置上部に所定の間隔を空けて設けられ、GNSSにより座標値を取得する複数の座標データ取得部と、
前記計測装置下部に所定の間隔を空けて設けられ、前記移動体に対して音波を受信または発信する複数の第2音波受発信部と、
前記複数の座標データ取得部により取得された座標値と、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波とに基づいて、前記状態検出部により検出された状態を補正する補正部と、を備えた
ことを特徴とする計測システム。
続きを表示(約 1,600 文字)
【請求項2】
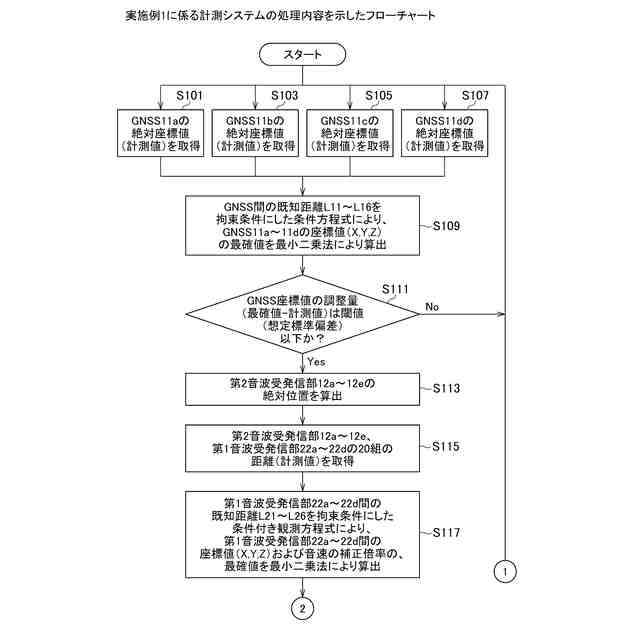
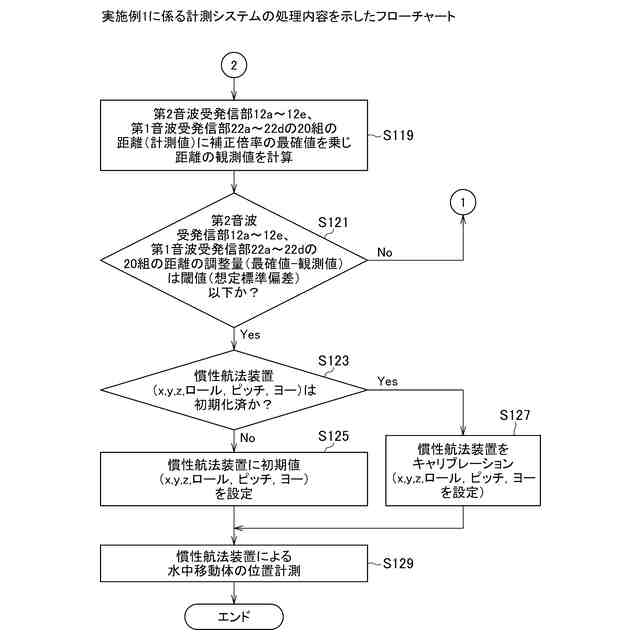
前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波と、前記複数の第1音波受発信部が設けられた前記所定の間隔とに基づいて、最小二乗法を用いて前記複数の第1音波受発信部と前記複数の第2音波受発信部との距離の最確値と補正倍率の最確値を算出し、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波に基づいて、前記複数の第1音波受発信部と前記複数の第2音波受発信部との距離を計測値として算出し、前記算出した前記距離の最確値と、前記算出した計測値に前記補正倍率の最確値を乗じた観測値との差分が所定の閾値以下か否かを判定する判定部を、さらに備え、
前記補正部は、
前記判定部により前記距離の最確値と前記観測値との差分が所定の閾値以下と判定された場合に、前記複数の座標データ取得部により取得された座標値と、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波とに基づいて、前記状態検出部により検出された状態を補正する
ことを特徴とする請求項1記載の計測システム。
【請求項3】
前記状態検出部は、前記移動体を移動させるための履帯の回転量を移動量として検出する履帯回転量検出部を含み、
前記補正部は、
前記複数の座標データ取得部により取得された座標値と、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波に基づいて、前記履帯回転量検出部により検出された移動量を補正する
ことを特徴とする請求項1記載の計測システム。
【請求項4】
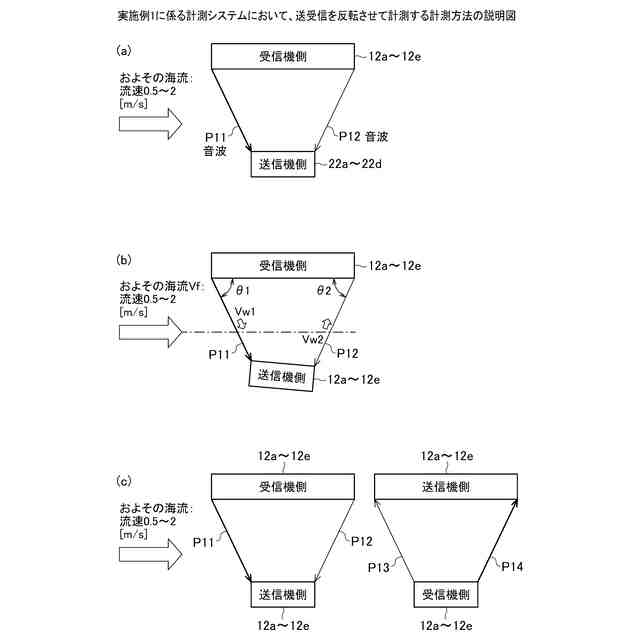
前記複数の第1音波受発信部および前記複数の第2音波受発信部は、それぞれ前記計測装置に対して音波を受信および発信する機能を有し、
前記補正部は、
前記複数の座標データ取得部により取得された座標値と、前記複数の第2音波受発信部から発信し前記複数の第1音波受発信部により受信した音波と、前記複数の第1音波受発信部から発信し前記複数の第2音波受発信部により受信した音波とに基づいて、前記状態検出部により検出された状態を補正する
ことを特徴とする請求項1記載の計測システム。
【請求項5】
前記複数の第1音波受発信部が音波を発信し、前記複数の第2音波受発信部が音波を受信する
ことを特徴とする請求項1記載の計測システム。
【請求項6】
前記複数の第2音波受発信部は、
少なくともいずれか1つの第2音波受発信部から前記移動体までの距離が、他の第2音波受発信部から前記移動体までの距離と異なるように配置された
ことを特徴とする請求項1記載の計測システム。
【請求項7】
前記複数の第2音波受発信部は、
多角形を形成するように配置すると共に、前記多角形の内部に1以上配置された
ことを特徴とする請求項6記載の計測システム。
【請求項8】
前記複数の第2音波受発信部は、
少なくとも1つの辺の長さが他の辺の長さと異なる不等辺多角形を形成するように配置された
ことを特徴とする請求項6記載の計測システム。
【請求項9】
前記判定部は、
前記複数の第1音波受発信部の位置座標数と前記水中の平均音速との合計数を未知数としたときに、
前記複数の第1音波受発信部と前記複数の第2音波受発信部とのそれぞれの距離を複数の計測値として算出した後、前記複数の計測値から、前記複数の計測値の平均値に基づいた前記未知数分の計測値を抽出し、最小二乗法により未知数の座標値および平均音速の最確値を求めた後、前記複数の距離の最確値を算出し、平均音速と標準音速の前記補正倍率を乗じた観測値との差分が、所定の閾値以下か否かを判定する
ことを特徴とする請求項2記載の計測システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、水中を移動する移動体の計測を行う計測システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
陸上における建設機械の遠隔操作は、車載カメラや周辺に配置した固定カメラからの映像と、建設機械に取り付けたGNSS(Global Navigation Satellite System)による位置情報、傾斜計やジャイロによる姿勢情報、各関節部に接続されたブーム・アーム・バケットなどに取り付けた傾斜計による部材の角度情報により、建設機械の現在位置と姿勢を確認して遠隔操作を行っている。
【0003】
水中においては、GNSSは用いることができず、正確に建設機械の現在位置と姿勢を把握することは困難となるため、ソナーとジャイロセンサ用いることが多い。
【0004】
例えば、特許文献1に示すように、水中掘削・均し作業機に備えられる3次元ソナーと、該作業機を遠隔操作する遠隔操作装置を有する支援台船に、ジャイロスコープと、全地球測位システム装置と、音速度計装置と、これらの各装置をそれぞれ有線若しくは無線で接続され各データを入力して記憶装置にデータ収録させ及びモニタに3次元表示させる3次元解析用パーソナルコンピューターとを備え、作業対象の地盤の出来形をリアルタイムで確認しながら該作業機を遠隔操作装置で操作して水中掘削・均し作業を行う水中掘削・均し作業機による掘削・均しの方法に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2012-144924号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の技術では、ジャイロスコープを用いているが、ジャイロスコープはドリフトと呼ばれる時間とともに誤差が増加し、適切な姿勢を計測することが困難であった。
【0007】
また、ソナーのみを用いて建設機械の現在位置と姿勢を計測する場合、所定の時間間隔で受信した複数点における超音波測定結果に基づいて、適切な現在位置と姿勢を算出するため、連続的に移動している建設機械の現在位置と姿勢を算出することが困難であった。
【0008】
本発明は、上記課題に鑑みてなされたものであり、適切に移動体の位置及び姿勢を計測する計測装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するため、本発明に係る計測システムの特徴は、
水中を移動する移動体と、前記移動体の計測を行う計測装置とを備えた計測システムであって、
前記移動体は、
前記移動体の移動量、移動方向、および姿勢のうち少なくとも1つを状態として検出する状態検出部と、
前記移動体上部に所定の間隔を空けて設けられ、前記計測装置に対して音波を受信または発信する複数の第1音波受発信部と、を備え、
前記計測装置は、
前記計測装置上部に所定の間隔を空けて設けられ、GNSSにより座標値を取得する複数の座標データ取得部と、
前記計測装置下部に所定の間隔を空けて設けられ、前記移動体に対して音波を受信または発信する複数の第2音波受発信部と、を備え、
前記複数の座標データ取得部により取得された座標値と、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波とに基づいて、前記状態検出部により検出された状態を補正する補正部と、を備えたことにある。
【0010】
本発明に係る計測システムの第2の特徴は、
前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波と、前記複数の第1音波受発信部が設けられた前記所定の間隔とに基づいて、最小二乗法を用いて前記複数の第1音波受発信部と前記複数の第2音波受発信部との距離の最確値と補正倍率の最確値を算出し、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波に基づいて前記複数の第1音波受発信部と前記複数の第2音波受発信部との距離を計測値として算出し、前記算出した前記距離の最確値と、前記算出した計測値に前記補正倍率の最確値を乗じた観測値との差分が所定の閾値以下か否かを判定する判定部を、さらに備え、
前記補正部は、
前記判定部により前記距離の最確値と前記観測値との差分が所定の閾値以下と判定された場合に、前記複数の座標データ取得部により取得された座標値と、前記複数の第1音波受発信部または前記複数の第2音波受発信部により受信した音波とに基づいて、前記状態検出部により検出された状態を補正することにある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社熊谷組
計測システム
1か月前
株式会社熊谷組
天井板撤去装置
1か月前
株式会社熊谷組
濁水処理システム
19日前
株式会社熊谷組
吊り足場の遮水設備
1か月前
株式会社熊谷組
手摺子及び格子状構造物
1か月前
株式会社熊谷組
床版、及び、床版接合方法
11日前
株式会社熊谷組
床版、及び、床版製造方法、並びに、床版接合構造
11日前
株式会社熊谷組
桟橋構築方法、及び橋梁構築方法
1か月前
個人
粒子分析装置
1か月前
株式会社イシダ
計量装置
1か月前
日本精機株式会社
表示装置
18日前
個人
アクセサリー型テスター
1か月前
日本精機株式会社
アセンブリ
24日前
株式会社エビス
水準器
17日前
個人
準結晶の解析方法
24日前
株式会社豊田自動織機
自動走行体
23日前
株式会社ミツトヨ
画像測定機
1か月前
日本碍子株式会社
ガスセンサ
17日前
株式会社不二越
塵埃噴射装置
12日前
株式会社テイエルブイ
振動検出装置
1か月前
個人
浸透探傷試験方法
13日前
トヨタ自動車株式会社
検査装置
1か月前
株式会社東芝
センサ
12日前
トヨタ自動車株式会社
制御装置
13日前
ダイハツ工業株式会社
試料セル
1か月前
日本特殊陶業株式会社
ガスセンサ
11日前
GEE株式会社
光学特性測定装置
23日前
トヨタ自動車株式会社
電気自動車
1か月前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
24日前
理研計器株式会社
ガス検出器
1か月前
東ソー株式会社
簡易型液体クロマトグラフ
1か月前
株式会社不二越
X線測定装置
18日前
個人
多段電磁加速による高力積衝撃試験機
5日前
理研計器株式会社
ガス検出器
1か月前
株式会社不二越
X線測定装置
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ