TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025053433
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023162459
出願日
2023-09-26
発明の名称
自己位置推定装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01C
21/28 20060101AFI20250331BHJP(測定;試験)
要約
【課題】自己位置推定装置において、自己位置推定精度の低下を抑制する。
【解決手段】周辺を撮像するカメラ10と通信装置20とを有する移動体200に設けられ、移動体の自己位置を推定する自己位置推定装置30は、画像特徴点を取得する特徴点取得部311と、画像の実スケールを算出するスケール算出部312と、画像特徴点と実スケールとを利用して自己位置を推定する自己位置推定部313と、を備え、スケール算出部は、物体情報を取得することと、物体画像特徴点を取得することと、物体画像特徴点の特徴量と物体情報とを利用して実スケールを算出することと、を実行する。
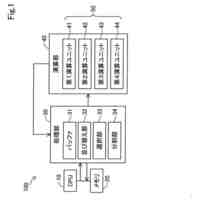
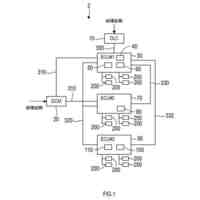
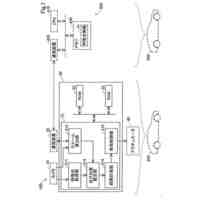
【選択図】図1
特許請求の範囲
【請求項1】
周辺を撮像するカメラ(10)と通信装置(20)とを有する移動体(200)に設けられ、前記移動体の自己位置を推定する自己位置推定装置(30、30A)であって、
前記カメラにより撮像される画像中に存在する特徴点である画像特徴点を取得する特徴点取得部(311)と、
前記画像の実スケールを算出するスケール算出部(312)と、
前記画像特徴点と前記実スケールとを利用して前記自己位置を推定する自己位置推定部(313)と、
を備え、
前記スケール算出部は、
前記移動体の周辺に位置する外部装置(400)から前記通信装置により取得される物体情報であって、前記画像中に存在する物体に関する情報である物体情報を取得することと、
前記画像特徴点のうち、前記物体情報に対応する前記物体についての特徴点である物体画像特徴点を取得することと、
前記物体画像特徴点の特徴量と前記物体情報とを利用して前記実スケールを算出することと、を実行する、
自己位置推定装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の自己位置推定装置であって、
前記外部装置は、前記移動体の周辺に位置する他の移動体(500)に設けられている、
自己位置推定装置。
【請求項3】
請求項2に記載の自己位置推定装置であって、
前記物体情報は、前記物体の位置を含み、
前記自己位置推定部は、前記物体の位置を利用して、バンドル調整により前記画像特徴点への再投影誤差を補正する処理をさらに実行する、
自己位置推定装置。
【請求項4】
請求項1に記載の自己位置推定装置であって、
前記外部装置は、前記移動体の周辺に設置された地物に設けられている、
自己位置推定装置。
【請求項5】
請求項4に記載の自己位置推定装置であって、
前記物体情報は、前記物体の位置を含み、
前記自己位置推定部は、前記物体の位置を利用して、バンドル調整により前記画像特徴点への再投影誤差を補正する処理をさらに実行する、
自己位置推定装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載の自己位置推定装置であって、
前記物体情報は、前記物体の少なくとも一部に対応する複数の特徴点である複数の物体特徴点の位置と、各前記物体特徴点の特徴量と、各前記物体特徴点の特徴量を算出する特徴量アルゴリズムの種類と、を示す特徴点情報(FI)を含み、
前記スケール算出部は、
前記画像特徴点のうち、前記画像特徴点のうち、前記物体特徴点に対応する特徴点を前記物体画像特徴点として取得し、
前記物体画像特徴点の特徴量と前記物体特徴点の特徴量とを利用して、前記実スケールを算出する、
自己位置推定装置。
【請求項7】
請求項6に記載の自己位置推定装置であって、
前記外部装置は、各前記物体特徴点について、複数の種類の前記特徴量アルゴリズムによりそれぞれ算出された複数の特徴量を予め記憶しており、
前記外部装置は、
前記特徴点取得部と前記スケール算出部とのうちの少なくとも一方との間で、各前記物体特徴点について、前記複数の種類の前記特徴量アルゴリズムのうち、いずれの種類の前記特徴量アルゴリズムにより算出された特徴量を前記特徴点情報として送信するかを決定することと、
前記特徴点情報として、各前記物体特徴点について、前記複数の特徴量のうち、決定された種類の前記特徴量アルゴリズムにより算出された特徴量を前記通信装置に送信することと、
を実行する、
自己位置推定装置。
【請求項8】
請求項6に記載の自己位置推定装置であって、
前記外部装置は、各前記物体特徴点について複数の種類の前記特徴量アルゴリズムによりそれぞれ算出された複数の特徴量を予め記憶しており、前記特徴点情報として、各前記物体特徴点について、前記複数の特徴量のうち、2以上の種類の前記特徴量アルゴリズムによりそれぞれ算出された複数の特徴量を前記通信装置に送信する、
自己位置推定装置。
【請求項9】
請求項6に記載の自己位置推定装置であって、
前記スケール算出部は、複数の種類の特徴量アルゴリズムを利用可能に構成されており、前記特徴点情報として受信された前記物体特徴点の特徴量の前記特徴量アルゴリズムの種類と同じ種類の特徴量アルゴリズムを利用して算出された前記物体画像特徴点の特徴量と、前記物体特徴点の特徴量とを利用して、前記実スケールを算出する、
自己位置推定装置。
【請求項10】
請求項6に記載の自己位置推定装置であって、
前記スケール算出部は、複数の種類の前記特徴量アルゴリズムを利用可能に構成されており、
前記外部装置は、各前記物体特徴点について、複数の種類の前記特徴量アルゴリズムによりそれぞれ算出された複数の特徴量を予め記憶しており、前記特徴点情報として、各前記物体特徴点について、前記複数の特徴量のうち、2以上の種類の前記特徴量アルゴリズムによりそれぞれ算出された複数の特徴量を前記通信装置に送信し、
前記スケール算出部は、
前記特徴点情報として受信された前記複数の特徴量のそれぞれを算出する前記特徴量アルゴリズムのうち利用可能な前記特徴量アルゴリズムが複数存在する場合、予め定められた優先順位に従って、利用する前記特徴量アルゴリズムの種類を決定し、
決定された種類の前記特徴量アルゴリズムを利用して算出された前記物体画像特徴点の特徴量と、前記物体特徴点の特徴量とを利用して、前記実スケールを算出する、
自己位置推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自己位置推定装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
車両の自己位置推定装置として、車両に搭載された単眼カメラにより撮像される画像を利用するものが知られている。単眼カメラにより撮像された画像は、実スケールが不定であるので自己位置推定精度が低下するおそれがある。特許文献1に記載の車両が備える自己位置推定装置では、自車両に搭載されたGNSS(Global Navigation Satellite System)受信機により受信される自車両の測位情報と、他の車両に搭載されたGNSS受信機により受信されて車車間通信により取得される他の車両の測位情報と、予め記憶されたローカルマップに含まれるランドマークの特徴点と、を利用して、自己位置推定の精度の低下を抑制している。
【先行技術文献】
【特許文献】
【0003】
特開2019-100942号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の車両が備える自己位置推定装置では、トンネル内や都市部等、GNSS受信機が測位情報を十分に受信できない環境において自己位置推定の精度が低下するおそれがある。また、予めランドマークの特徴点のデータベースを作製して記憶しておく必要があり記憶装置の記憶容量を圧迫するという問題がある。このような問題は、車両に限らず、飛行体やロボット等の任意の移動体に搭載される自己位置推定装置においても同様である。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、周辺を撮像するカメラ(10)と通信装置(20)とを有する移動体(200)に設けられ、前記移動体の自己位置を推定する自己位置推定装置(30)が提供される。この制御装置は、前記カメラにより撮像される画像中に存在する特徴点である画像特徴点を取得する特徴点取得部(311)と、前記画像の実スケールを算出するスケール算出部(312)と、前記画像特徴点と前記実スケールとを利用して前記自己位置を推定する自己位置推定部(313)と、を備え、前記スケール算出部は、前記移動体の周辺に位置する外部装置(400)から前記通信装置により取得される物体情報であって、前記画像中に存在する物体に関する情報である物体情報を取得することと、前記画像特徴点のうち、前記物体情報に対応する前記物体についての特徴点である物体画像特徴点を取得することと、前記物体画像特徴点の特徴量と前記物体情報とを利用して前記実スケールを算出することと、を実行する。
【0007】
この形態の自己位置推定装置によれば、物体画像特徴点の特徴量と物体情報とを利用して実スケールを算出し、画像特徴点と実スケールとを利用して自己位置を推定する。このため、GNSS受信機が測位情報を十分に受信できない環境においても、移動体に搭載されたカメラを利用して自己位置を推定でき、自己位置推定の精度の低下を抑制できる。加えて、外部装置から取得した物体情報を利用するので、予めランドマークの特徴点のデータベース等を作製して自身の記憶装置に記憶しておく形態と比較して、自身の記憶装置の記憶容量が圧迫されることを抑制できる。
【図面の簡単な説明】
【0008】
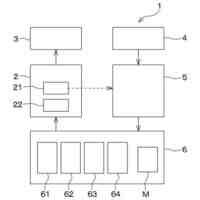
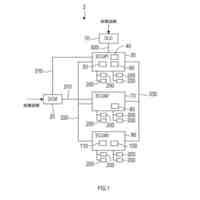
第1実施形態の制御装置の概略構成を示すブロック図である。
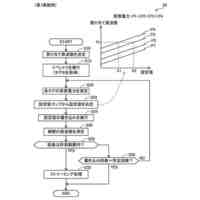
第1実施形態の制御装置における処理の手順を示すフローチャートである。
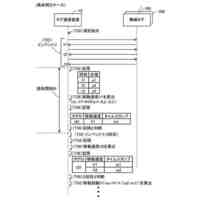
第1実施形態の実スケール算出処理の手順を示すフローチャートである。
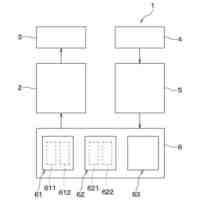
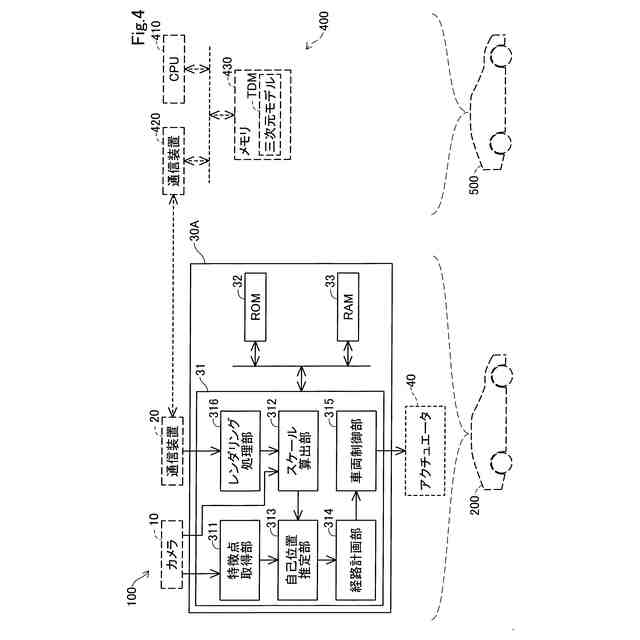
第2実施形態の制御装置の概略構成を示すブロック図である。
第2実施形態の実スケール算出処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A-1.装置構成:
図1に示すように、車両200は、カメラ10と、通信装置20と、制御装置30と、アクチュエータ40とを備える。車両200は、自動運転を実行可能な車両であり、自動運転と手動運転とが切り替え可能に構成されている。「自動運転」とは、駆動制御とブレーキ制御と操舵制御とを、乗員に代わって自動的に実行する運転を意味する。「手動運転」とは、駆動制御のための操作(アクセルペダルの踏込)と、ブレーキ制御のための操作(ブレーキベダルの踏込)と、操舵制御のための操作(ステアリングホイールの回転)とを、乗員が実行する運転を意味する。車両200は、例えば、電気自動車(BEV:Battery Electric Vehicle)や、ハイブリッド自動車(HEV:Hybrid Electric Vehicle)、燃料電池自動車(FCV:Fuel Cell Vehicle)、ガソリン車やディーゼル車等の任意の車両として構成される。なお、車両200は、GNSS(Global Navigation Satellite System)受信機やIMU(Inertial Measurement Unit)、LiDAR(Light Detection And Ranging)等の車両200の位置や姿勢の検出に利用可能な種々のセンサを備えていてもよい。
【0010】
カメラ10は、車両200の周辺を撮像し画像を取得する。本実施形態では、カメラ10は、車両200の前方を撮像する単眼カメラとして構成されている。なお、カメラ10は、車両200の前方に限らず、側方または後方を撮像してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソーエレクトロニクス
筐体
5日前
株式会社デンソー
モータ
18日前
株式会社デンソー
診断装置
4日前
株式会社デンソー
試験装置
14日前
株式会社デンソー
電池装置
12日前
株式会社デンソー
回転電機
19日前
株式会社デンソー
演算装置
4日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
慣性センサ
11日前
株式会社デンソー
レーダ装置
11日前
株式会社デンソー
レーダ装置
18日前
株式会社デンソー
レーダ装置
5日前
株式会社デンソー
レーダ装置
5日前
株式会社デンソー
レーダ装置
12日前
株式会社デンソー
半導体装置
14日前
株式会社デンソー
レーダ装置
12日前
株式会社デンソー
通信システム
19日前
株式会社デンソー
通信システム
19日前
株式会社デンソーウェーブ
タグ通信装置
19日前
株式会社デンソー
通信システム
20日前
株式会社デンソーウェーブ
タグ通信装置
4日前
株式会社デンソー
熱交換システム
今日
株式会社デンソー
回転角度検出装置
12日前
株式会社デンソー
路面摩擦推定装置
19日前
株式会社デンソーウェーブ
光学情報読取装置
4日前
株式会社デンソーウェーブ
ロボットシステム
20日前
株式会社デンソーテン
スロットアンテナ
13日前
株式会社デンソー
自己位置推定装置
21日前
株式会社デンソーウェーブ
データ配信システム
18日前
株式会社デンソー
二酸化炭素回収装置
13日前
株式会社デンソーウェーブ
歪ゲージの取付方法
19日前
株式会社デンソーウェーブ
移動体追跡システム
21日前
株式会社デンソートリム
エンジン電子制御装置
19日前
株式会社デンソーウェーブ
ロボット制御システム
17日前
株式会社デンソー
シャント式電流センサ
20日前
株式会社デンソー
酸性ガス回収システム
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ