TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067626
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177752
出願日
2023-10-13
発明の名称
タグ通信装置
出願人
株式会社デンソーウェーブ
代理人
弁理士法人 快友国際特許事務所
主分類
H04W
64/00 20090101AFI20250417BHJP(電気通信技術)
要約
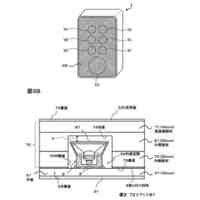
【課題】無線タグから受信する応答電波の位相を利用して、無線タグの移動距離を算出するための技術を提供する。
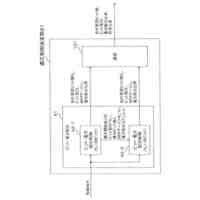
【解決手段】タグ通信装置は、無線タグとの第1の通信を実行する第1の通信実行部であって、第1の通信では、タグ通信装置は、無線タグから2個以上の応答電波を受信する、第1の通信実行部と、2個以上の応答電波のそれぞれの位相を検出する検出部と、2個以上の応答電波から検出された2個以上の位相の推移から無線タグの第1の移動速度を算出する第1の速度算出部と、第1の通信を実行した後に、無線タグとの第2の通信を実行する第2の通信実行部と、第1の通信を実行した第1のタイミングと第2の通信を実行した第2のタイミングとの差分と、第1の移動速度と、を利用して、第1のタイミングから第2のタイミングまでに移動した無線タグの移動距離を算出する距離算出部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
無線タグと通信可能なタグ通信装置であって、
前記無線タグとの第1の通信を実行する第1の通信実行部であって、前記第1の通信では、前記タグ通信装置は、前記無線タグから2個以上の応答電波を受信する、前記第1の通信実行部と、
前記2個以上の応答電波のそれぞれの位相を検出する検出部と、
前記2個以上の応答電波から検出された2個以上の位相の推移から前記無線タグの第1の移動速度を算出する第1の速度算出部と、
前記第1の通信を実行した後に、前記無線タグとの第2の通信を実行する第2の通信実行部と、
前記第1の通信を実行した第1のタイミングと前記第2の通信を実行した第2のタイミングとの差分と、前記第1の移動速度と、を利用して、前記第1のタイミングから前記第2のタイミングまでに移動した前記無線タグの移動距離を算出する距離算出部と、
を備える、タグ通信装置。
続きを表示(約 2,600 文字)
【請求項2】
前記第2の通信では、前記タグ通信装置は、前記無線タグから2個以上の応答電波を受信し、
前記検出部は、前記第1の通信における前記2個以上の応答電波のそれぞれの位相を検出するとともに、前記第2の通信における前記2個以上の応答電波のそれぞれの位相を検出し、
前記タグ通信装置は、さらに、
前記第2の通信における前記2個以上の応答電波から検出された2個以上の位相の推移から前記無線タグの第2の移動速度を算出する第2の速度算出部と、
前記第2の通信を実行した後に、前記無線タグとの第3の通信を実行する第3の通信実行部と、
を備え、
前記距離算出部は、前記第2のタイミングと前記第3の通信を実行した第3のタイミングとの差分と、前記第1の移動速度と前記第2の移動速度に基づいて算出された移動速度と、を利用して、前記第2のタイミングから前記第3のタイミングまでに移動した前記無線タグの移動距離を算出する、請求項1に記載のタグ通信装置。
【請求項3】
前記第1の通信では、前記タグ通信装置は、前記無線タグから3個以上の応答電波を受信し、
前記検出部は、前記3個以上の応答電波のそれぞれの位相を検出し、
前記第1の速度算出部は、
前記3個以上の位相の推移のうちの隣り合う2個の位相から移動速度を算出することにより、2個以上の移動速度を算出し、
前記2個以上の移動速度から、前記2個以上の移動速度の移動平均値から所定値以上離れた移動速度を除外した1個以上の移動速度に基づいて、前記第1の移動速度を算出する、請求項1に記載のタグ通信装置。
【請求項4】
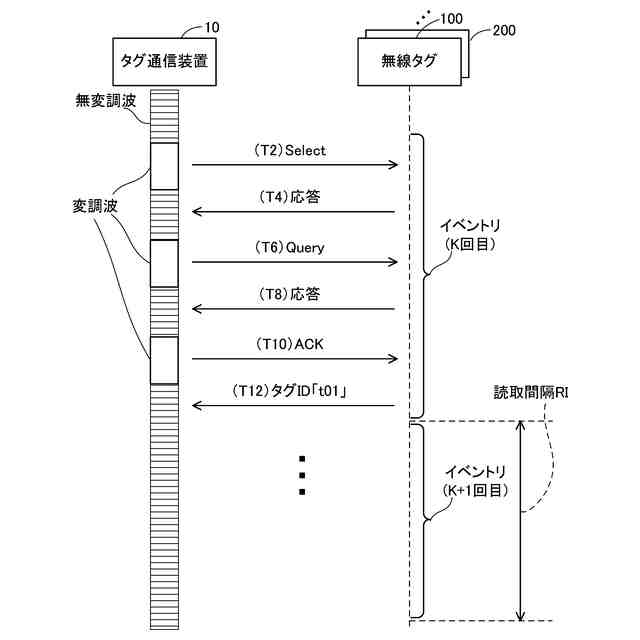
前記第1の通信は、前記無線タグとのインベントリを実行するための通信であり、
前記第2の通信は、前記無線タグとのインベントリを再び実行するための通信である、請求項1に記載のタグ通信装置。
【請求項5】
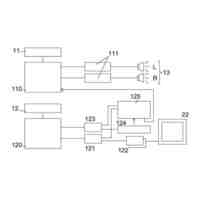
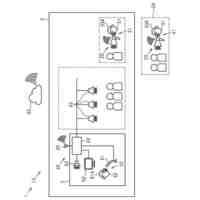
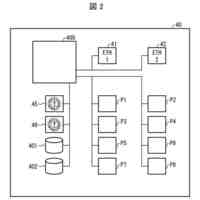
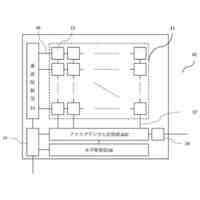
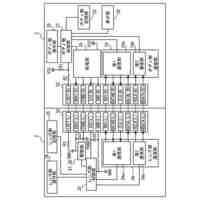
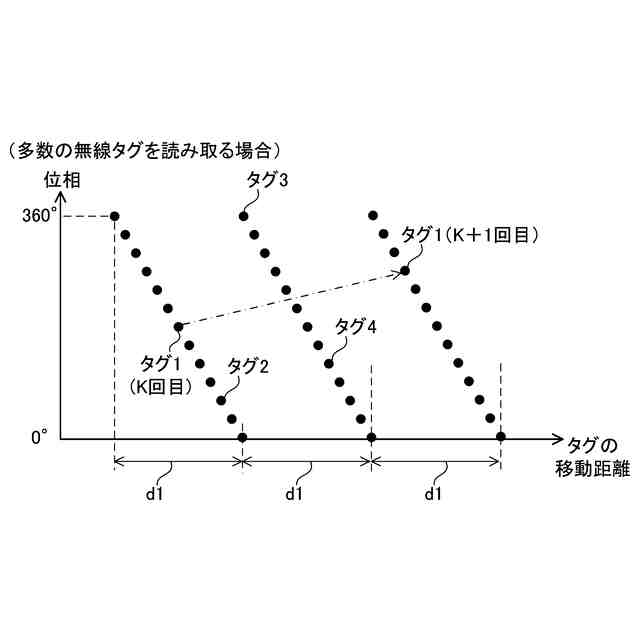
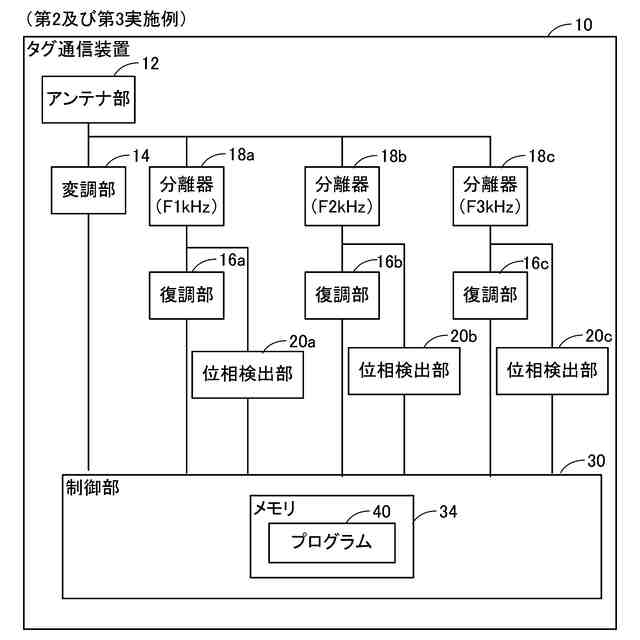
前記タグ通信装置は、N個(前記Nは2以上の整数)の前記無線タグと通信可能であり、
前記N個の無線タグのそれぞれには、互いに異なるバックスキャッタ周波数が割り当てられており、
前記N個の無線タグのそれぞれは、当該無線タグに割り当てられる前記バックスキャッタ周波数を有する前記2個以上の応答電波を送信し、
前記タグ通信装置は、さらに、
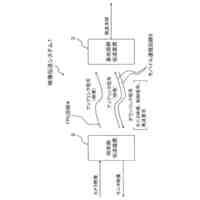
前記N個の無線タグのそれぞれから前記2個以上の応答電波を受信するアンテナ部と、
前記アンテナ部に接続されているN個の分離器と、
N個の復調部と、
N個の前記検出部と、
を備え、
前記N個の分離器のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の復調部のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の検出部のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の分離器のそれぞれは、対応するバックスキャッタ周波数が割り当てられている前記無線タグから受信した前記2個以上の応答電波を、前記N個の復調部のうちの対応する復調部と、前記N個の検出部のうちの対応する検出部と、の双方に伝達する、請求項1に記載のタグ通信装置。
【請求項6】
前記2個以上の応答電波は、変調された反射波である変調反射波及び変調されていない反射波である無変調反射波のいずれかであり、
前記無変調反射波である各応答電波のスペクトル幅は、前記変調反射波である応答電波のスペクトル幅よりも狭く、
前記N個は、前記無変調反射波である各応答電波のスペクトル幅において割り当て可能な前記バックスキャッタ周波数の個数である、請求項5に記載のタグ通信装置。
【請求項7】
N個(前記Nは2以上の整数)の無線タグと通信可能なタグ通信装置であって、
前記N個の無線タグのそれぞれから、応答電波を繰り返し受信するアンテナ部であって、前記N個の無線タグのそれぞれには、互いに異なるバックスキャッタ周波数が割り当てられており、前記N個の無線タグのそれぞれは、当該無線タグに割り当てられる前記バックスキャッタ周波数を有する前記応答電波を送信する、前記アンテナ部と、
前記アンテナ部に接続されているN個の分離器と、
N個の復調部と、
N個の検出部と、
を備え、
前記N個の検出部のそれぞれは、前記応答電波の位相を検出し、
前記N個の分離器のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の復調部のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の検出部のそれぞれは、互いに異なる前記バックスキャッタ周波数に対応し、
前記N個の分離器のそれぞれは、対応するバックスキャッタ周波数が割り当てられている前記無線タグから受信した前記応答電波を、前記N個の復調部のうちの対応する復調部と、前記N個の検出部のうちの対応する検出部と、の双方に伝達し、
前記タグ通信装置は、さらに、
前記N個の検出部のうちの特定の検出部によって検出された位相の推移から、前記N個の無線タグのうち、前記特定の検出部に対応する前記バックスキャッタ周波数が割り当てられた特定の無線タグの移動距離を算出する距離算出部を備える、
タグ通信装置。
【請求項8】
前記応答電波は、変調された反射波である変調反射波及び変調されていない反射波である無変調反射波のいずれかであり、
前記無変調反射波である前記応答電波のスペクトル幅は、前記変調反射波である前記応答電波のスペクトル幅よりも狭く、
前記N個は、前記無変調反射波である前記応答電波のスペクトル幅において割り当て可能な前記バックスキャッタ周波数の個数である、請求項7に記載のタグ通信装置。
【請求項9】
前記タグ通信装置は、さらに、
前記N個の無線タグのそれぞれに設定値を書き込むことによって、前記N個の無線タグのそれぞれに互いに異なる前記バックスキャッタ周波数を割り当てる割り当て部を備える、請求項7又は8に記載のタグ通信装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、無線タグと通信可能なタグ通信装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、無線タグから受信した信号電波の位相差を利用して、無線タグとの距離を算出するタグリーダが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-075927号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
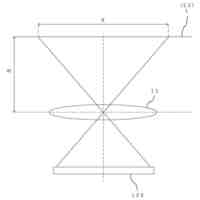
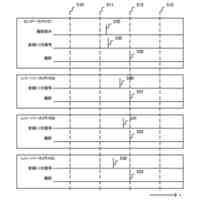
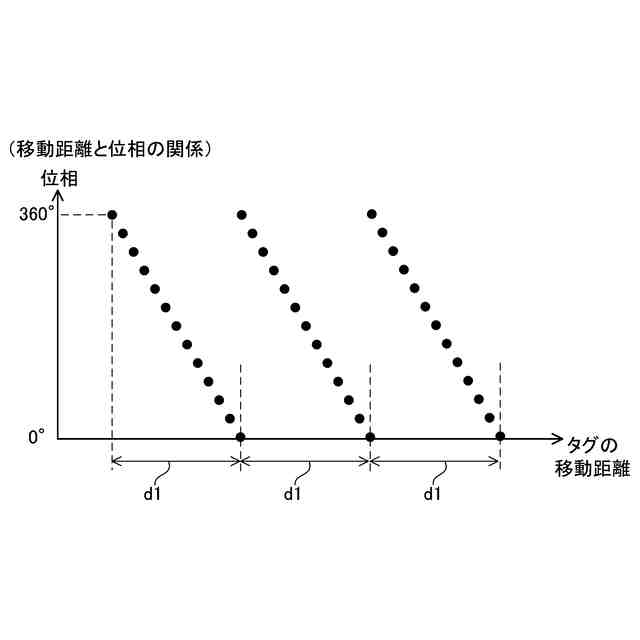
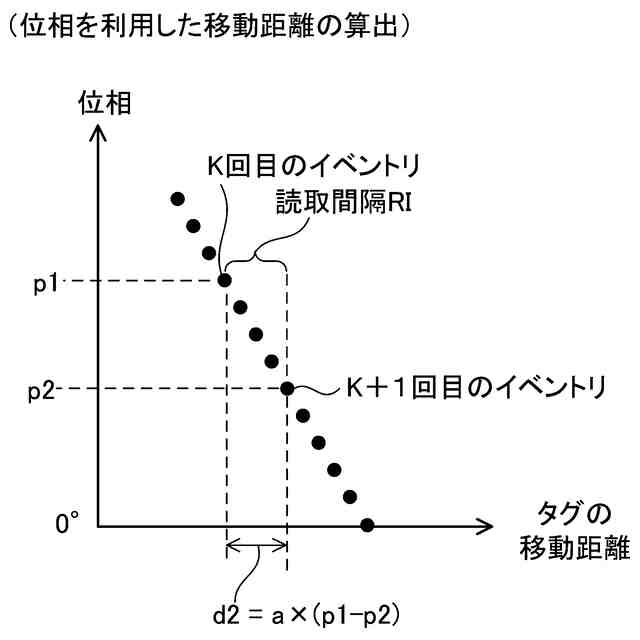
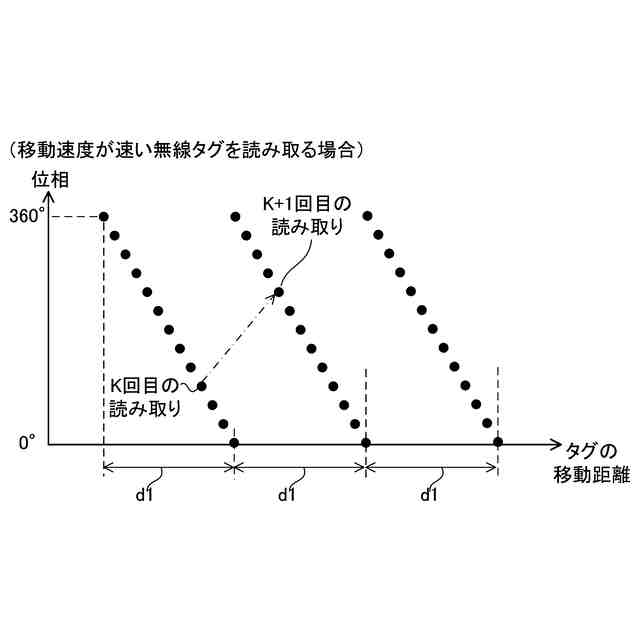
例えば、無線タグが移動している状況を想定する。ここで、第1の位置で検出された位相と第2の位置で検出された位相との間の位相差から、無線タグの移動距離、即ち、第1の位置と第2の位置の間の距離を算出することが可能である。ここで、位相は、無線タグが所定の距離だけ移動すると、一巡する。第2の位置における位相が、第1の位置における位相から一巡以上した後の位相である場合には、正しい位相差を算出することが難しい。例えば、無線タグの移動速度が速い場合には、第2の位置における位相が、第1の位置における位相から一巡以上した後の位相であり得る。
【0005】
本明細書では、無線タグから受信する応答電波の位相を利用して、無線タグの移動距離を算出するための技術を提供する。
【課題を解決するための手段】
【0006】
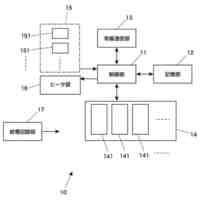
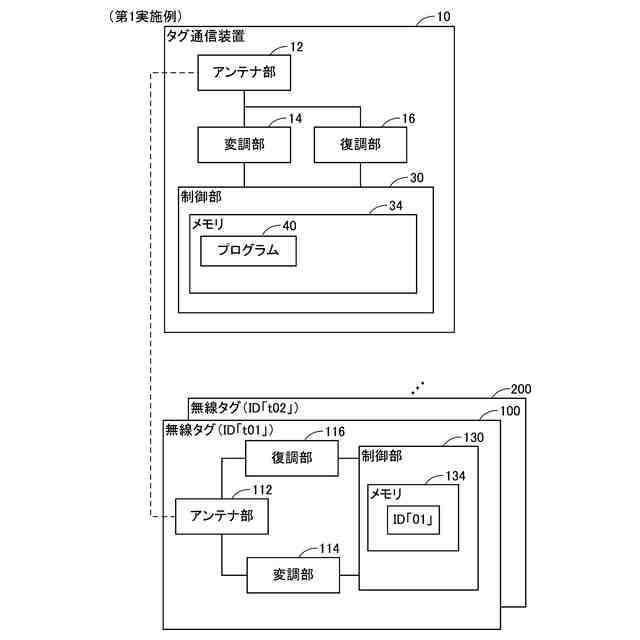
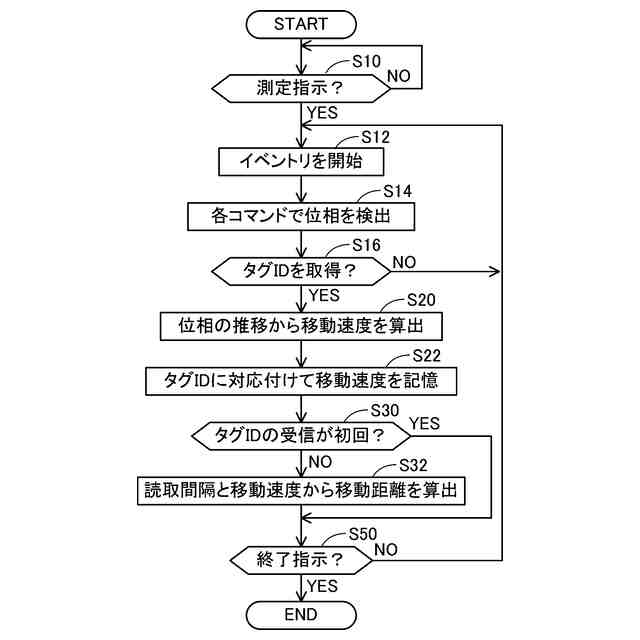
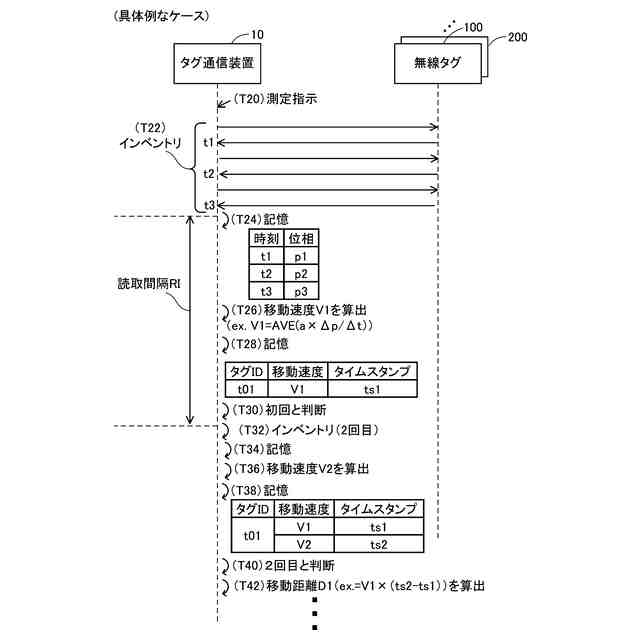
本明細書は、無線タグと通信可能なタグ通信装置を開示する。タグ通信装置は、前記無線タグとの第1の通信を実行する第1の通信実行部であって、前記第1の通信では、前記タグ通信装置は、前記無線タグから2個以上の応答電波を受信する、前記第1の通信実行部と、前記2個以上の応答電波のそれぞれの位相を検出する検出部と、前記2個以上の応答電波から検出された2個以上の位相の推移から前記無線タグの第1の移動速度を算出する第1の速度算出部と、前記第1の通信を実行した後に、前記無線タグとの第2の通信を実行する第2の通信実行部と、前記第1の通信を実行した第1のタイミングと前記第2の通信を実行した第2のタイミングとの差分と、前記第1の移動速度と、を利用して、前記第1のタイミングから前記第2のタイミングまでに移動した前記無線タグの移動距離を算出する距離算出部と、を備える。
【0007】
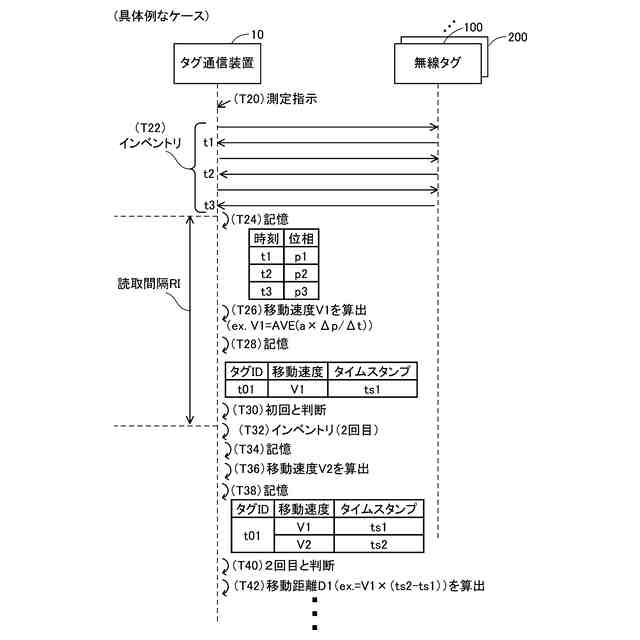
例えば、第1のタイミングで実行される第1の通信における位相と第2のタイミングで実行される第2の通信における位相の間の位相差を利用して、第1のタイミングから第2のタイミングまでに移動した無線タグの移動距離を算出する比較例が想定される。この比較例において、第2のタイミングにおける位相が、第1のタイミングにおける位相から少なくとも一巡した後の位相である場合には、正しい位相差を算出することができない。これに対して、上記の構成において、第1の通信内の2個以上の応答電波を、位相が一巡する間隔よりも短い間隔で送信すれば、正しい位相の推移を得ることができる。その結果、正しい移動速度を算出することができる。正しい移動速度を利用することにより、第1のタイミングから第2のタイミングまでの正しい移動距離を算出することができる。
【0008】
前記第2の通信では、前記タグ通信装置は、前記無線タグから2個以上の応答電波を受信し、前記検出部は、前記第1の通信における前記2個以上の応答電波のそれぞれの位相を検出するとともに、前記第2の通信における前記2個以上の応答電波のそれぞれの位相を検出し、前記タグ通信装置は、さらに、前記第2の通信における前記2個以上の応答電波から検出された2個以上の位相の推移から前記無線タグの第2の移動速度を算出する第2の速度算出部と、前記第2の通信を実行した後に、前記無線タグとの第3の通信を実行する第3の通信実行部と、を備え、前記距離算出部は、前記第2のタイミングと前記第3の通信を実行した第3のタイミングとの差分と、前記第1の移動速度と前記第2の移動速度に基づいて算出された移動速度と、を利用して、前記第2のタイミングから前記第3のタイミングまでに移動した前記無線タグの移動距離を算出してもよい。
【0009】
上記の構成によれば、1つの移動速度を利用する構成と比較して、精度よく移動距離を算出することができる。
【0010】
前記第1の通信では、前記タグ通信装置は、前記無線タグから3個以上の応答電波を受信し、前記検出部は、前記3個以上の応答電波のそれぞれの位相を検出し、前記第1の速度算出部は、前記3個以上の位相の推移のうちの隣り合う2個の位相から移動速度を算出することにより、2個以上の移動速度を算出し、前記2個以上の移動速度から、前記2個以上の移動速度の移動平均値から所定値以上離れた移動速度を除外した1個以上の移動速度に基づいて、前記第1の移動速度を算出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
音響装置
21日前
個人
携帯端末保持具
24日前
個人
防犯AIプラグイン
2か月前
個人
テレビ会議拡張システム
1か月前
日本精機株式会社
投影システム
27日前
日本無線株式会社
音声通信方式
21日前
日本放送協会
無線通信装置
2か月前
キヤノン株式会社
通信装置
10日前
日本精機株式会社
車両用表示装置
8日前
ヤマハ株式会社
音響出力装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
個人
無線中継赤外線コピーリモコン
1か月前
キヤノン電子株式会社
画像読取装置
21日前
キヤノン電子株式会社
画像読取装置
24日前
個人
補聴器のイヤピース耳穴挿入具
14日前
ヤマハ株式会社
音響出力装置
1か月前
キヤノン電子株式会社
画像処理装置
2か月前
TOA株式会社
音響システム
1か月前
株式会社ヴィーネックス
カメラ
15日前
キヤノン株式会社
画像処理装置
3日前
キヤノン株式会社
画像読取装置
1か月前
キヤノン株式会社
映像表示装置
1か月前
キヤノン株式会社
画像処理装置
23日前
キヤノン株式会社
撮影システム
14日前
リオン株式会社
電気機械変換器
8日前
オムロン株式会社
スレーブ装置
1か月前
株式会社シグマ
撮像素子及び撮像装置
21日前
日本放送協会
映像伝送システム
23日前
シャープ株式会社
表示装置
7日前
シャープ株式会社
電子機器
15日前
株式会社クーネル
音響装置
2日前
株式会社ユピテル
撮像装置等
1か月前
株式会社ニコン
カメラボディ
1か月前
株式会社国際電気
無線通信システム
10日前
株式会社バッファロー
無線通信装置
23日前
アイホン株式会社
インターホン機器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ