TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059533
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169677
出願日
2023-09-29
発明の名称
ロボット用操作端末及び安全スイッチ
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/06 20060101AFI20250403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット用操作端末を操作する際のユーザの負担を軽減すること。
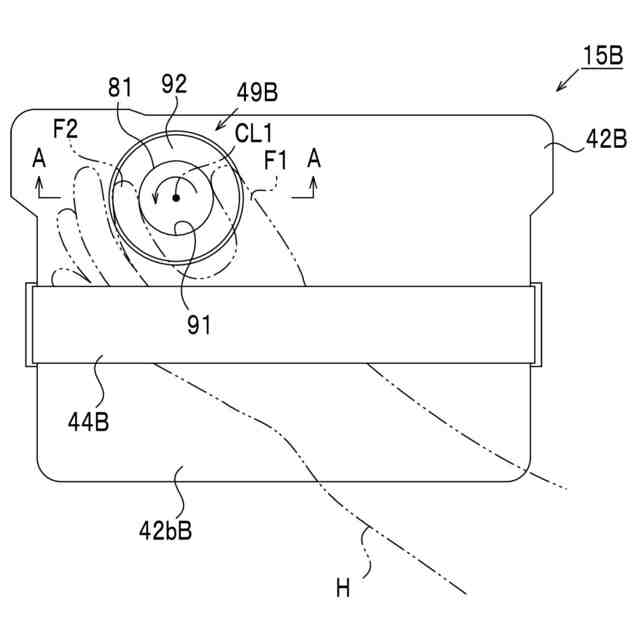
【解決手段】ロボット用の操作端末15Bには、当該操作端末15Bの厚さ方向に延びる軸線CL1を中心として回動可能な操作ダイヤル81と、操作ダイヤル81の回動位置が当該操作ダイヤル81の回動範囲における中間位置である第2ポジションとなっていることを検知可能なセンサユニット82とを有してなるイネーブルスイッチ49Bが設けられている。操作ダイヤル81の回動位置が第2ポジションとなっている場合にロボットの動作が許可され、第1ポジション又は第3ポジションとなっている場合にはロボットの動作が不許可となる。操作ダイヤル81の周辺には、ユーザが操作ダイヤル81を第2ポジションへ回動させた状態で保持する場合に、操作ダイヤル81を操作している指F1,F2を置くことができる指置き部92が設けられている。
【選択図】 図16
特許請求の範囲
【請求項1】
産業ロボットの操作に用いられるロボット用操作端末であって、
ロータリ式の安全操作部と、前記安全操作部の回動位置が当該安全操作部の回動範囲における中間位置である所定の回動位置となっていることを検知可能な検知部とを有してなる安全スイッチを備え、
前記安全操作部の回動位置が前記所定の回動位置となっている場合に前記産業ロボットの動作を許可し、前記所定の回動位置となっていない場合に前記産業ロボットの動作を不許可とする構成となっており、
前記安全操作部の周辺には、ユーザが前記安全操作部を前記所定の回動位置へ回動させた状態で保持する場合に、前記安全操作部を操作している指を置くことができる指置き部が設けられているロボット用操作端末。
続きを表示(約 1,000 文字)
【請求項2】
前記安全操作部は、当該安全操作部の回動中心軸線を中心とする環状をなし当該回動中心軸線と平行な操作面部を有してなり、
前記指置き部は、面状をなしており、前記操作面部とは異なる方向を向いている請求項1に記載のロボット用操作端末。
【請求項3】
前記指置き部は、平坦な面状をなしており、前記安全操作部の正面視にて当該安全操作部を囲むように形成されている請求項2に記載のロボット用操作端末。
【請求項4】
前記所定の回動位置として第1回動位置及び第2回動位置が設けられており、
前記安全操作部は、ユーザによる回動操作が行われていない場合には前記第1回動位置と前記第2回動位置との間の回動位置にて待機した待機状態となるように構成されており、
前記安全操作部は、前記待機状態となっている状況下にて前記安全操作部を第1方向へ回動させることにより当該安全操作部の回動位置を前記第1回動位置とすることが可能であり、前記待機状態となっている状況下にて前記安全操作部を第2方向へ回動させることにより当該安全操作部の回動位置を前記第2回動位置とすることが可能である請求項1に記載のロボット用操作端末。
【請求項5】
前記検知部として、発光部及び受光部を有する光センサが設けられており、
前記安全操作部の回動位置が前記所定の回動位置となっている場合とそれ以外の回動位置となっている場合とで、前記受光部の受光状態に差が生じる構成となっている請求項1乃至請求項4のいずれか1つに記載のロボット用操作端末。
【請求項6】
産業ロボットの操作に用いられるロボット用操作端末に適用される安全スイッチであって、
ロータリ式の安全操作部と、
前記安全操作部の回動位置が当該安全操作部の回動範囲における中間位置である所定の回動位置となっていることを検知可能な検知部と
を有し、
前記安全操作部の回動位置が前記所定の回動位置となっている場合に前記産業ロボットの動作を許可し、前記所定の回動位置となっていない場合に前記産業ロボットの動作を不許可とする構成となっており、
前記安全操作部の周辺には、ユーザが前記安全操作部を前記所定の回動位置へ回動させた状態で保持する場合に、前記安全操作部を操作している指を置くことができる指置き部が設けられている安全スイッチ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業ロボットの操作に用いられるロボット用操作端末及び安全スイッチに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
産業ロボットの操作に用いられるティーチングペンダント等の操作端末には、手動操作時の安全性向上を目的としてイネーブルスイッチが搭載されているものがある。イネーブルスイッチはロボットの手動操作を有効化又は無効化するための安全スイッチであり、近年ではこの種のスイッチとして操作子を少し押し込んだ場合(すなわち中間位置へ押し込んだ場合)にロボットの手動操作が有効化される一方、大きく押し込んだ場合には手動操作が無効となるものが提案されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-24848号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、手動操作が有効化された状態を継続させるには操作子を中間位置で保持する必要があり、操作子を操作している指の力が弱くなり過ぎたり強くなり過ぎたりしないように、常に一定の力を加え続ける必要がある。実際には、加える力を意識しても当該力についてはある程度の揺らぎが発生する。そこで、ユーザによっては手(指)の形に意識を向けて手を所定の形で維持するといった方法で操作することもある。但し、長時間にわたって力を加え続けたり手を同じ形に維持したりすることはユーザにとって大きな負担になり得る。これは、操作端末を用いた作業の効率を低下させる要因になると懸念される。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、ロボット用操作端末を操作する際のユーザの負担を軽減することにある。
【課題を解決するための手段】
【0006】
第1の手段.産業ロボットの操作に用いられるロボット用操作端末であって、
ロータリ式の安全操作部と、前記安全操作部の回動位置が当該安全操作部の回動範囲における中間位置である所定の回動位置となっていることを検知可能な検知部とを有してなる安全スイッチを備え、
前記安全操作部の回動位置が前記所定の回動位置となっている場合に前記産業ロボットの動作を許可し、前記所定の回動位置となっていない場合に前記産業ロボットの動作を不許可とする構成となっており、
前記安全操作部の周辺には、ユーザが前記安全操作部を前記所定の回動位置へ回動させた状態で保持する場合に、前記安全操作部を操作している指を置くことができる指置き部が設けられている。
【0007】
第1の手段に示すロボット用操作端末においては、安全操作部を操作している指を当該安全操作部の周辺に設けられた指置き部に置くことで、当該指は安全操作部と指置き部との両方に接触させることが可能である。このような構成によれば、指置き部が、安全操作部を操作している指の位置や形を一定に維持する上で一助として機能し、安全操作部を所定の回動位置に留める際の指の力への依存を抑えることができる。例えば、軸線方向における指位置は指先等を指置き部に当てておくことでばらつきにくくなり(ストッパ機能)、軌道方向における指位置は指先等を指置き部に当てることで生じる摩擦が抵抗となってばらつきにくくなる(抵抗発生機能)。このようにしてユーザの負担を軽減することにより、産業ロボットの動作が許容された状態を維持しやすくなる。
【0008】
第2の手段.産業ロボットの操作に用いられるロボット用操作端末に適用される安全スイッチであって、
ロータリ式の安全操作部と、
前記安全操作部の回動位置が当該安全操作部の回動範囲における中間位置である所定の回動位置となっていることを検知可能な検知部と
を有し、
前記安全操作部の回動位置が前記所定の回動位置となっている場合に前記産業ロボットの動作を許可し、前記所定の回動位置となっていない場合に前記産業ロボットの動作を不許可とする構成となっており、
前記安全操作部の周辺には、ユーザが前記安全操作部を前記所定の回動位置へ回動させた状態で保持する場合に、前記安全操作部を操作している指を置くことができる指置き部が設けられている。
【0009】
第2の手段に示す安全スイッチによれば、ユーザの負担を軽減することにより、産業ロボットの動作が許容された状態を維持しやすくなる。
【図面の簡単な説明】
【0010】
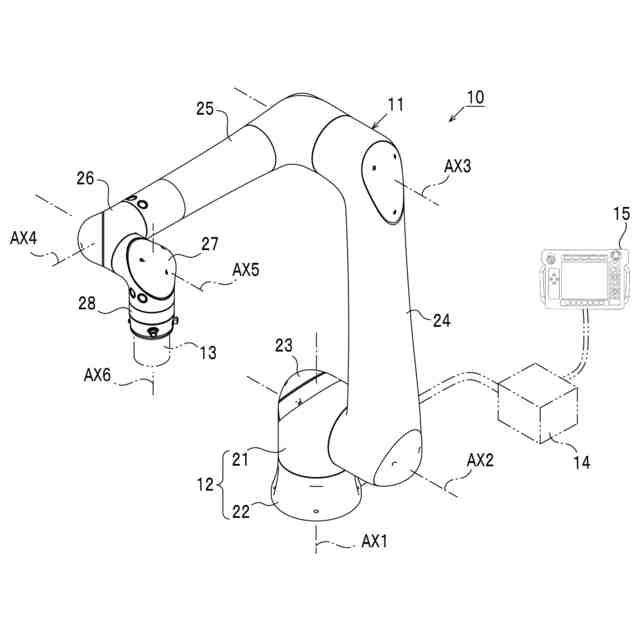
第1の実施形態におけるロボットシステムを示す斜視図。
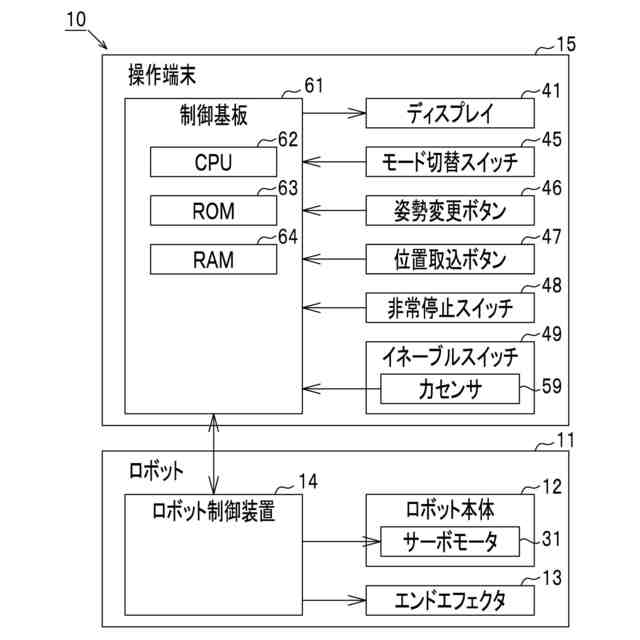
ロボットシステムの電気的構成を示すブロック図。
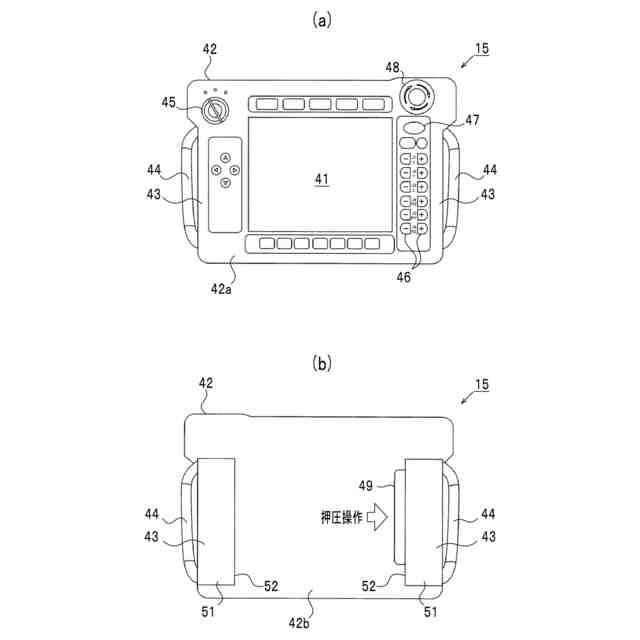
(a)操作端末の正面図、(b)操作端末の背面図。
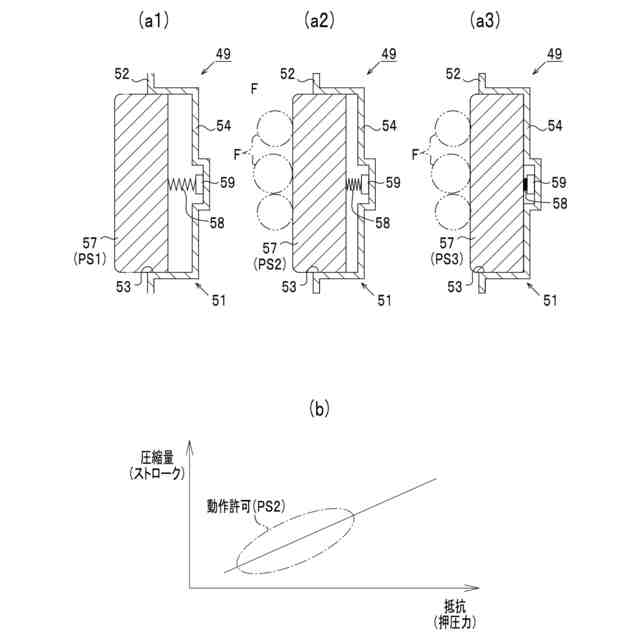
(a)イネーブルスイッチの構造を示す概略図、(b)イネーブルスイッチを操作した際に発生する抵抗とストロークとの関係を示す概略図。
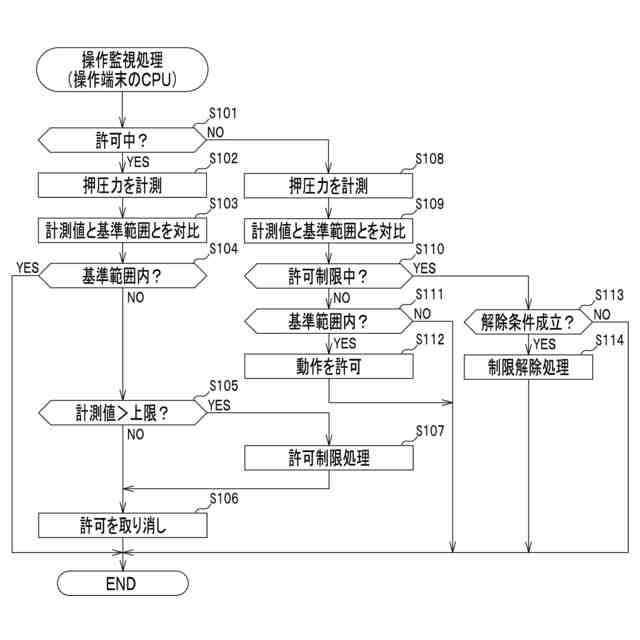
操作端末のCPUにて実行される操作監視処理を示すフローチャート。
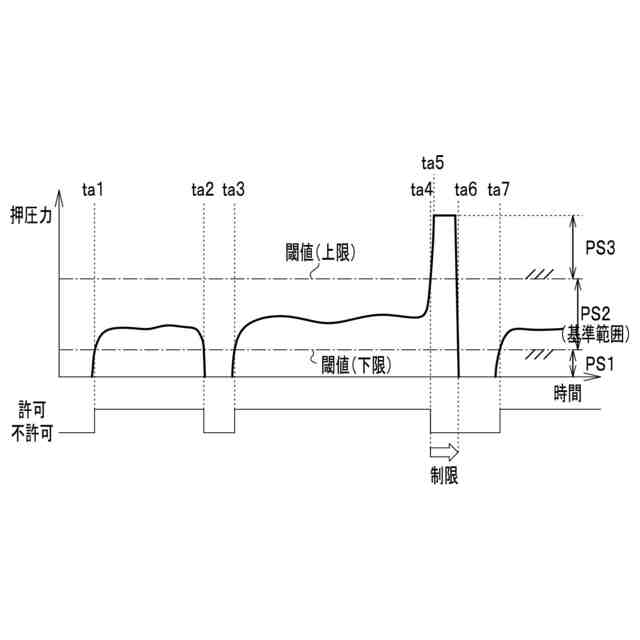
許可/不許可の切り替えの流れを例示したタイミングチャート。
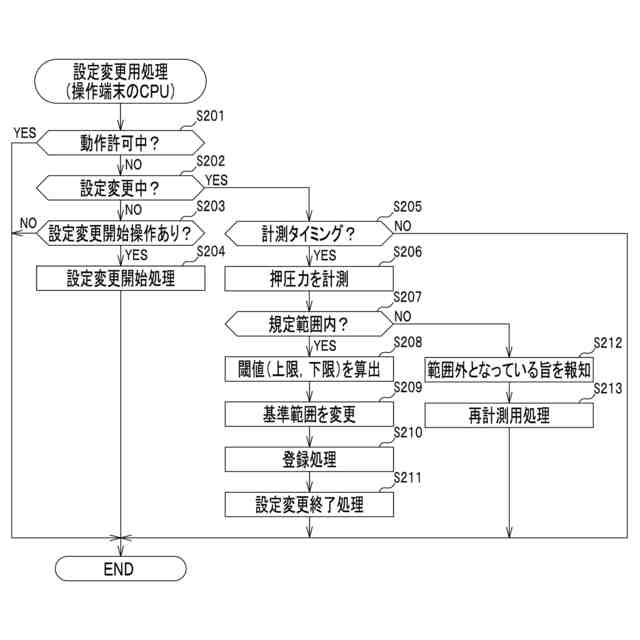
操作端末のCPUにて実行される設定変更用処理を示すフローチャート。
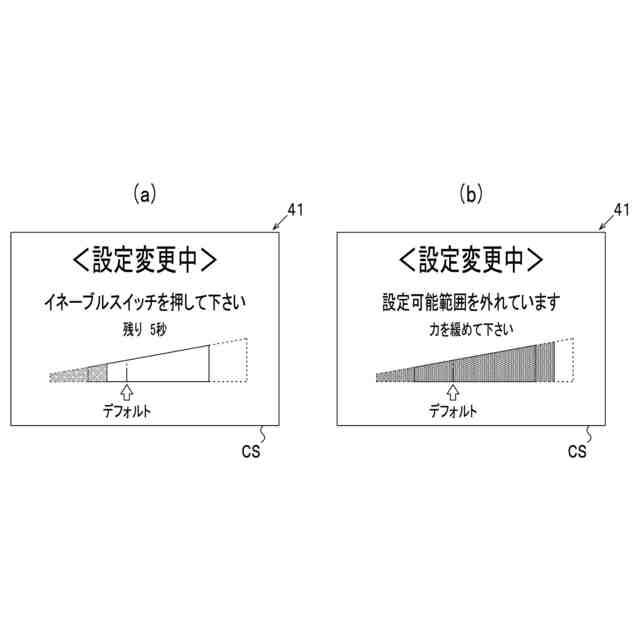
設定変更時の表示内容を例示した概略図。
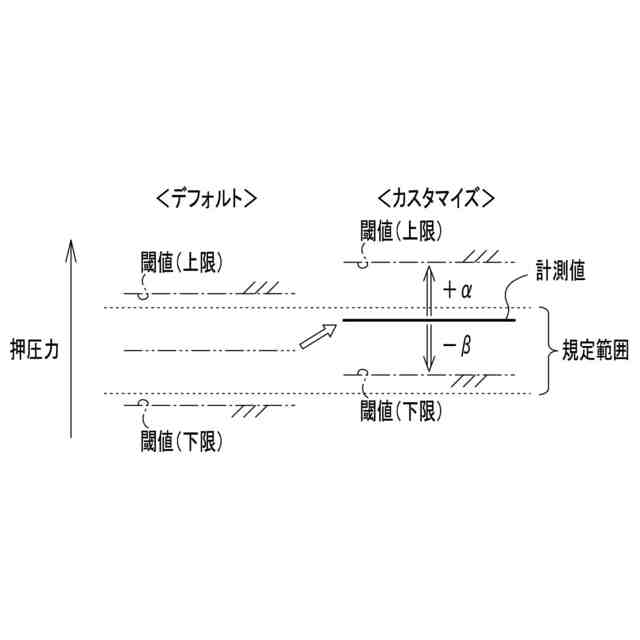
基準範囲の閾値変更の様子を示す概略図。
操作端末のCPUにて実行される自動変更用処理を示すフローチャート。
第2の実施形態におけるロボットシステムの電気的構成を示すブロック図。
複数の力センサを併用した場合に生じる課題を説明するための概略図。
設定変更用処理を示すフローチャート。
力センサ毎に設定される基準範囲を示す概略図。
変形例を示す概略図。
第3の実施形態における操作端末の背面図。
図16のA-A線部分断面図。
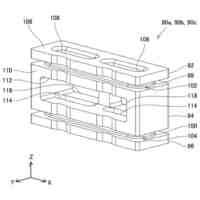
イネーブルスイッチの内部構造を示す部分断面図。
許可/不許可の切り替えの流れを示す概略図。
各ポジションを示す概略図。
(a)第4の実施形態における操作端末の斜視図、(b)イネーブルスイッチの部分断面図、(c)各ポジションを示す概略図。
変形例を示す概略図。
変形例を示す概略図。
変形例を示す概略図。
(a)第5の実施形態における操作端末の背面図、(b)図25(a)のB-B線部分断面図。
指の挿入位置と受光状態との関係を示す概略図。
許可/不許可の切り替えの流れを示す概略図。
第6の実施形態におけるイネーブルスイッチを示す概略図。
変形例を示す概略図。
変形例を示す概略図。
変形例を示す概略図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
25日前
株式会社アイセイ
搬送装置
1か月前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット
17日前
個人
けがき用治具
19日前
株式会社不二越
ロボット操作装置
16日前
個人
深孔スリーブ駆動ロッド構造
9日前
川崎重工業株式会社
ロボット
17日前
株式会社デンソー
操縦桿
17日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
川崎重工業株式会社
ロボットシステム
25日前
工機ホールディングス株式会社
作業機
4日前
個人
バール
9日前
梅馨堂合同会社
人協働ロボットシステム
11日前
アピュアン株式会社
衝撃工具
1か月前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社不二越
基板搬送用ロボット
26日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
株式会社マキタ
電動工具
1か月前
学校法人法政大学
装着型アシスト装置
6日前
株式会社マキタ
作業機
16日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
三菱電機株式会社
トルク締め個所検出システム
9日前
株式会社マキタ
打ち込み工具
1か月前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
中国電力株式会社
電動ドライバー
3日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
JUKI株式会社
ハンドリング装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ